 電子發燒友App
電子發燒友App


驅動電路IR2110的特性及應用
功率變換裝置中的功率開關器件,根據主電路的不同,一般可采用直接驅動和隔離驅動兩種方式。其中隔離驅動可分為電磁隔離和光電隔離兩種。光電隔離具有體積小,結構簡單等優點,但同時存在共模抑制能力差,傳輸速度慢的缺點。快速光耦的速度也僅有幾十kHz。電磁隔離用脈沖變壓器作為隔離元件,具有響應速度快(脈沖的前沿和后沿),原副邊的絕緣強度高,dv/dt共模干擾抑制能力強等特點。但信號的最大傳輸寬度有受磁飽和特性的限制,因而信號的頂部不易傳輸。而且最大占空比被限制在50%。同時信號的最小寬度也要受磁化電流的限制。同時脈沖變壓器體積也大,而且笨重,工藝復雜。
凡是隔離驅動方式,每路驅動都需要一組輔助電源,若是三相橋式變換器,則需要六組,而且還要互相懸浮,因而增加了電路的復雜性。隨著驅動技術的不斷成熟,現已有多種集成厚膜驅動器推出。如EXB840/841、EXB850/851、M57959L/AL、M57962L/AL、HR065等等,它們均采用的是光耦隔離,而光耦隔離仍受到上述缺點的限制。
而美國IR公司生產的IR2110驅動器則兼有光耦隔離(體積小)和電磁隔離(速度快)的優點,是中小功率變換裝置中驅動器件的首選品種。
1? IR2110的結構特點
IR2110采用HVIC和閂鎖抗干擾CMOS工藝制造,DIP14腳封裝。該器件具有獨立的低端和高端輸入通道。其懸浮電源采用自舉電路,高端工作電壓可達500 V,dV/dt=±50 Wns,15 V下的靜態功耗僅116 mW。IR2110的輸出端f腳3,即功率器件的柵極驅動電壓)電壓范圍為10~20 V,邏輯電源電壓范圍(腳9)為5~15 V,可方便地與TTL、CMOS電平相匹配,而且邏輯電源地和功率地之間允許有±5 V的偏移量;此外,該器件的工作頻率可達500 kHz,而且開通、關斷延遲小(分別為120 ns和94 ns),圖騰柱輸出峰值電流為2 A。
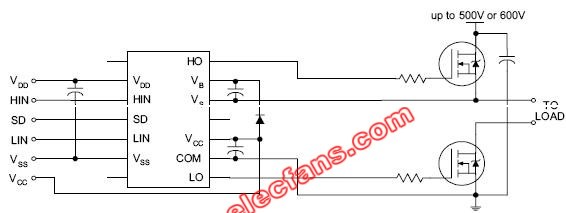
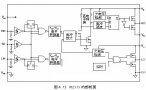
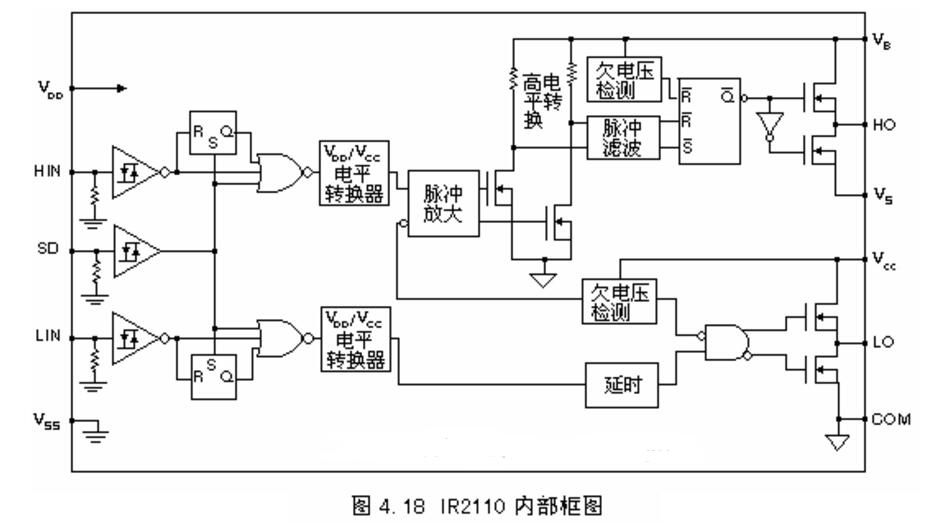
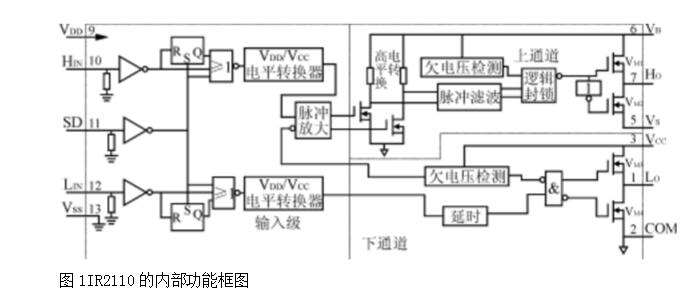
IR2110的內部功能框圖如圖1所示。由圖可見,它由邏輯輸入、電平平移及輸出保護三個部分組成。IR2110可以為裝置的設計帶來許多方便,尤其是高端懸浮自舉電源的成功設計,可以大大減少驅動電源的數目。
2自舉元器件的選擇
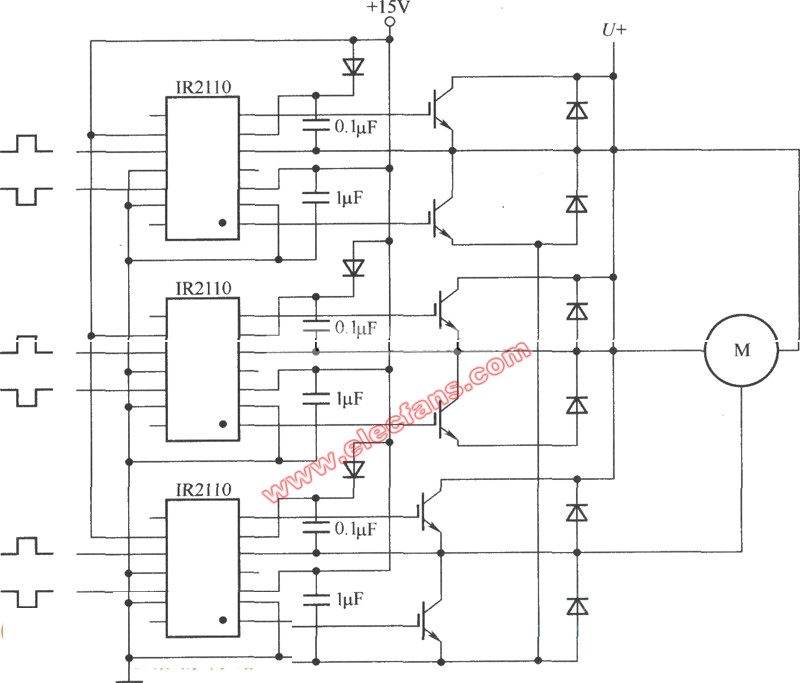
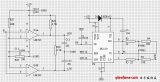
圖2所示是基于IR2110的半橋驅動電路。其中的自舉二極管VD1和電容C1是IR2110在大功率脈寬調制放大器應用時需要嚴格挑的元器件,應根據一定的規則進行計算分析。在電路實驗時,還要進行一些調整,以使電路工作在最佳狀態。
2.1? 自舉電容的設計
IGBT和PM(POWER MOSFET)具有相似的門極特性,它們在開通時都需要在極短的時間內向門極提供足夠的柵電荷。假定在器件開通后,自舉電容兩端的電壓比器件充分導通所需要的電壓(10 V,高壓側鎖定電壓為8.7/8.3 V)要高,而且在自舉電容充電路徑上有1.5 V的壓降(包括VD1的正向壓降),同時假定有1/2的柵電壓(柵極門檻電壓VTH通常3~5 V)因泄漏電流引起電壓降。那么,此時對應的自舉電容可用下式表示:![]()
例如IRF2807充分導通時所需要的柵電荷Qg為160 nC(可由IRF2807電特性表查得),Vcc為15V,那么有:![]()
這樣C1約為0.1 μF,設計中即可選取C1為0.22μF或更大,且耐壓大于35 V的獨石電容。
2.2懸浮驅動的最寬導通時間ton(max)確定
當最長的導通時間結束時,功率器件的門極電壓Vgs仍必須足夠高,即必須滿足式(1)的約束關系。對于MOSEFT,因為絕緣門極輸入阻抗比較高,假如柵電容(Cgs)充電后,在Vcc為15 V時有15μA的漏電流(IgQs)從C1中抽取,若仍以本文的自舉電容設計的參數為例,Qg=160 nC,△U=Vcc-10-1.5=3.5 V,Qavail=△UC=3.5x0.22=0.77μC。則過剩電荷△Q=0.77-0.16=0.61 μC,△Uc=△Q/C=0.61/0.22=2.77 V,因此可得Uc=10+2.77=12.77 V。由U=Uc及柵極輸入阻抗R為1 MΩ,即可求出t(即ton(max)為:![]()
2.3懸浮驅動的最窄導通時間ton(min)確定
在自舉電容的充電路徑上,分布電感將會影響充電的速率。下管的最窄導通時間應保證自舉電容能夠有足夠的電荷,以滿足Gge所需要的電荷量加上功率器件穩態導通時漏電流所失去的電荷量。因此從最窄導通時間ton(min)考慮,自舉電容應足夠小。
實際上,在選擇自舉電容大小時,應當綜合考慮,既不能大到影響窄脈沖的驅動性能,但也不能太小。
2.4? 自舉二極管的選擇
自舉二極管是一個重要的自舉器件。它應在高端器件開通時能阻斷直流干線上的高壓,并且應當是快恢復二極管,以減小從自舉電容向電源Vcc的回饋電荷。二極管承受的電流是柵極電荷與開關頻率之積。為了減少電荷損失,應選擇反向漏電流小的快恢復二極管。
如果電容需要長期貯存電荷,則高溫反向漏電流十分重要。二極管耐壓選擇可按后級功率MOSEFT管的要求來定,其最大反向恢復時間trr要小于等于100 ns,二極管所承受的電流IF=Qbsf。
3 IR2110的擴展應用
3.1? 高壓側懸浮驅動的自舉原理
在圖2所示的IR2110用于驅動半橋的電路圖中,C1、VD1分別為自舉電容和二極管,C2為VCC的濾波電容。假定在S1關斷期間,C1已充到足夠的電壓(Vc1≈Vcc)。那么,HIN為高電平時VM1開通,VM2關斷,VC1加到S1的門極和發射極之間,C1通過VM1、Rg1和S1門極柵極電容Cgc1放電,從而使Cgc1被充電。此時,VC1可等效為一個電壓源。而當HIN為低電平時,VM2開通,VM1斷開,S1柵電荷經Rg1、VM2迅速釋放,使S1關斷。然后經短暫的死區時間(td)之后,LIN為高電平,S2開通,VCC經VD1,S2給C1充電,并迅速為C1補充能量,并如此循環反復。
由此可知,自舉電路必須在IR2110輸人信號不斷的高低電平變化中,且自舉電容反復充、放電時,才能起到正常的自舉作用,而當IR2110的輸人信號是直流電平信號時,自舉電容將不能完成電荷的儲存,即不能得到正常的充電,因此也不能為高端二極管提供驅動信號。如果不解決IR2110此功能的不足,則當電機負載實際工作在占空比為1,負載兩端電壓為零時,電機將停止工作;同時也會給功率開關管帶來很大的電流變化率,從而影響功率管的使用壽命和長期可靠性。因此,在工作中應采取下面兩種技術措施。
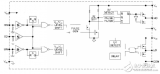
(1)輸入幅度鑒別電路的應用
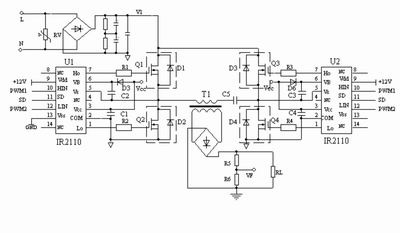
為了克服上述不足,可在工作中設計輸入幅度鑒別電路,其電路如圖3所示。該電路不僅可保證在輸入信號的線性區內,輸出調寬方波信號,而且,當輸入信號在線性區外時,電路也可以輸出固定的占空比信號,這樣,即可保證電機在線性區外也能正常轉動,同時也保證了輸出負載電流不會產生大的突變。
(2)電荷泵電路
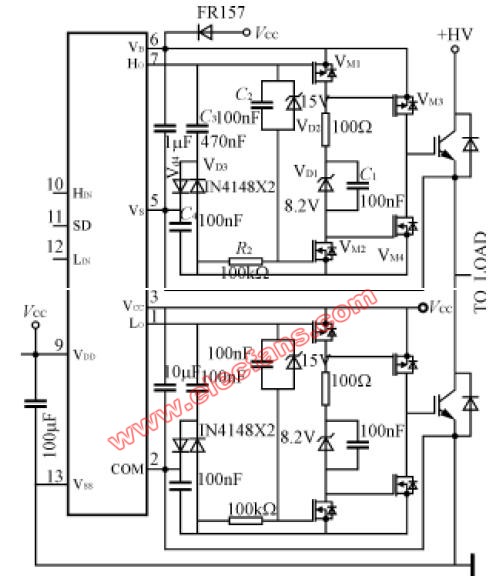
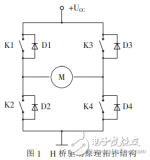
當電路輸入100%占空比信號時,其核心振蕩電路CD4093將產生一定頻率的方波信號。當此方波信號為低電平時,功率電源+Vs通過D5給儲能電容C3充電;而當此方波信號為高電平時,C3則通過D4給自舉電容C2充電,以維持自舉電容的能量,最終使電路在100%占空比輸入信號時,由H橋輸出100%的占空比信號,同時也保證輸出電流的連續性。圖4所示為電荷泵電路圖。
3.2防直通導通延時電路
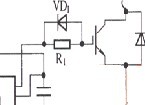
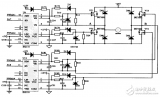
對H橋驅動電路上下橋臂功率晶體管加互補信號后,由于帶載情況下,晶體管的關斷時間通常比開通時間長,這樣,當下橋臂晶體管未及時關斷而上橋臂搶先開通時,就會出現所謂“橋臂直通”故障。這樣會使橋臂直通時電流迅速變大,從而造成功率開關損壞。所以設置導通延時及死區時間必不可少。IR2110具有一定的死區時間,其大小為10 ns且不可外調,而實際使用中,MOSEFT管的關斷時間比開通時間有時還要比10ns大,此時就需要外加延時電路來加大死區時間,以防止電路直通,圖5給出了一種導通延時電路及其波形。
導通延時也可以通過RC時間常數來設置。對GTR,可按0.2μs/A來設置;而對MOSFET,則可按0.1~0.2μs來設計,且與電流無關;IGBT可按2~5μs來設計。假如GTR的f為5 kHz旦雙極性工作,調寬區域為T/2=1/10=0.1 ms,此時若I為100 A,則△t=0.2×100=20μs。這樣PWM調制分辨率的最大可能性為:![]()
這說明死區時間占據了調制周期的1/5,顯然是不可行的。所以,對于100 A的電機系統,GTR的開關頻率必須低于5 kHz。例如,2 kHz以下,此時的分辨率可達12.5左右。
4結束語
IR2110是一種性能比較優良的驅動集成電路,它的自舉懸浮驅動電源可同時驅動同一橋臂的上、下兩個開關器件,驅動電壓高達500 V,工作頻率為500 kHz,并具有電源欠壓保護關斷邏輯。IR2110的輸出用圖騰柱結構,驅動峰值電流為2 A,同時兩通道還設有低壓延時封鎖(50ns)。此外,芯片還有一個封鎖兩路輸出的保護端SD,在SD輸入高電平時,兩路輸出均被封鎖。IR2110的這些優點給實際系統設計帶來了極大方便,特別是自舉懸浮驅動電源大大簡化了驅動電源設計,因為只用一路電源即可完成上下橋臂兩個功率開關器件的驅動。但與其它驅動集成電路相比,IR2110的保護功能略顯不足,死區時間不可外調;電路工作在100%占空比信號輸入時,也需要外接電荷泵電路來維持自舉電容的足夠能量。不過這些不足在實際應用中都可以通過本文所述的拓展應用電路來進行完善和補充。
本文作者已將上述擴展應用電路應用于仿美國APEX公司SAxx系列產品的應用研制中,而且獲得了較好的效果,研制的產品已通過全部的鑒定檢驗,并通過了國防科工委組織的鑒定。該成果可在航天和兵器系統中,取代APEX公司的同類產品,而且系統工作正常,用戶比較滿意。












 工商網監
工商網監
評論