 電子發燒友App
電子發燒友App


引言
作為旋轉導向智能鉆井系統核心部件的可控偏心器,其原理是利用電機泵產生推動翼肋伸縮的動力, 當采用電機泵動力時,電機泵的能量來源于井下渦輪發電機。由于可控偏心器的機械結構決定了電機泵要安裝在不旋轉套上,而發電機要安裝在旋轉的主軸上,這樣就涉及到旋轉和不旋轉之間的能量傳輸問題。以前一直采用的是接觸式滑環能量傳輸方式,由于接觸式滑環存在安裝不方便、旋轉時易磨損、易受到井下鉆井液、水的腐蝕以及泥漿的影響等缺陷,迫切需要一種新的非接觸式能量傳輸方式——松耦合電能傳輸技術。作為松耦合電能傳輸技術的核心部分——松耦合變壓器,對它的研究則顯得尤為重要。
對于井下惡劣的環境以及空間等各方面因素的限制,我們對松耦合變壓器的研究存在較大困難,而ANSYS的實體建模能力可以快速精確地模擬三維松耦合變壓器。ANSYS三維仿真無論是建模、網格劃分還是后處理,都有它自己獨特的優點,尤其是在后處理中,可以觀察出各個方向的電磁力、磁感應強度、磁動勢等。下面就介紹ANSYS10.0軟件在松耦合變壓器中的三維仿真分析過程。
松耦合變壓器的ANSYS三維仿真
針對松耦合變壓器,我們采用了磁矢量位方法進行仿真。磁矢量位方法(MVP)是ANSYS支持的三維靜態、諧波和瞬態分析的兩種基于節點分析方法中的一個。矢量位方法在X、Y和Z方向分別具有磁矢量位AX、AY、AZ。在載壓或電路耦合分析中還引入了另外三個自由度:電流(CURR),電壓降(EMF)和電壓(VOLT)。3-D矢量位方程中,用INFIN111遠場單元(AX、AY、AZ三個自由度)來為無限邊界建模。
單元類型選擇,實常數及材料屬性設置
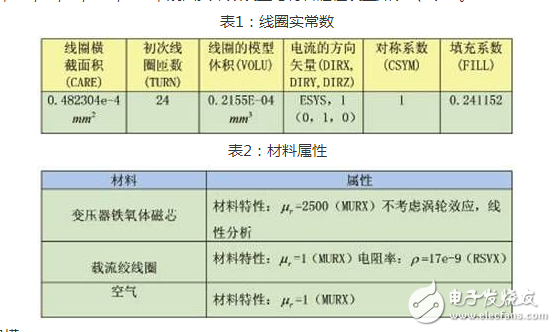
場路耦合可用于2維和3維仿真,建立電路單元需要用CIRCUI24單元進行建模,將建立好的電路模型與有限元實體模型進行耦合。其中實體模型可選擇PLAN53(2D)、SOLID97(3D)和SOLIDll7(3D-20node)單元。對于節點法3-D分析,可選的單元為3D 矢量位SOLID97單元,與2D單元不同,自由度為:AX,AY,AZ,AX,AY,AZ,CUR,EMF;線圈實常數設置與材料屬性設置如表1、表2。
表1:線圈實常數
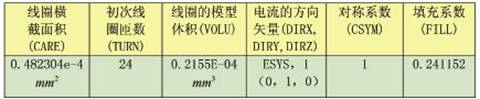
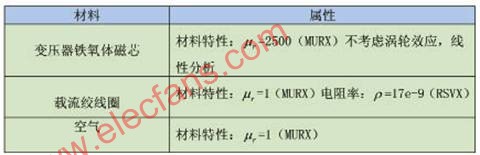
表2:材料屬性
實體建模
松耦合變壓器材料為錳鋅鐵氧體,結構為上下罐狀磁環,按照磁環實際尺寸可建立三維模型。應用ANSYS10.0的Emag模塊對變壓器進行三維場路耦合仿真分析,變壓器物理模型如圖1所示。分析過程如下:
圖1 變壓器實物圖
根據圖1所示變壓器物理模型進行實體建模,通過命令流或GUI方法對模型進行自上而下的建模,三維模型如圖2所示。
圖2 ANSYS三維模型
然后進行網格劃分,同樣也可以采用GUI和命令流兩種操作,網格劃分有多種劃分方式,在這里主要采用了三維自由網格劃分。
建立電路模型
建立獨立電壓源,電壓設置為正弦電壓源。并設置電壓源的幅度、頻率、相位等參數。
建立絞線圈的電路模型,對其實常數和單元類型等參數進行設置。
對線圈內阻進行電路模型設置,電阻的大小由萬用表測得。
次級線圈加負載R3工作。全部模型建立完畢如圖3所示。
進行瞬態分析求解
耦合絞線圈所有節點的CURR自由度,施加邊界條件。
如果加載的電壓15V,頻率10kHz,磁環中間氣隙1mm,負載100Ω,在一個正弦周期內用16個載荷步,則每個載荷步的時間間隔為6.25e-6s。每個載荷步又分為5個子步來實現。在本文中施加20個載荷步后進行求解。
后臺處理,結果觀察
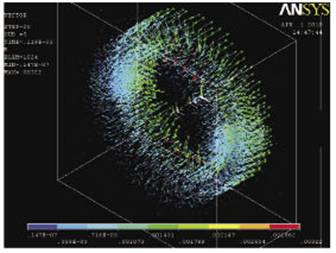
3-D矢量分析得不到通量線(磁力線),但可利用磁通密度矢量顯示來觀察通量路徑。使用Post1通用后臺處理器觀察最后載荷步結果磁感應強度B矢量圖,如圖4所示。
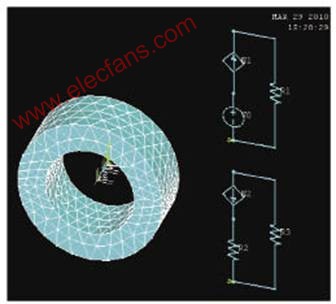
圖3 場路耦合有限元模型
使用Post26時間歷程后臺處理器查看次級負載R3的感應電動勢,并輸出曲線圖,如圖5所示。

圖5 次級負載感應電動勢曲線圖
三維仿真數據與實測數據對比
為了分析方便,在仿真時將磁芯設為線性導磁材料,相對磁導率定為:2500;不考慮渦流損耗;氣隙間距:1mm;初級電壓加幅值為15V的正弦波,頻率為10kHz;負載為100Ω。根據上面分析,實驗數據與仿真數據如表3所示:
表3:實測與仿真數據對比

從表3的分析對比可以看出,三維仿真和實測的效率誤差在5%左右。其中次級的電流電壓值基本和實際測量的電流電壓值相符合。篇幅所限,表中只列出初級電壓在15V,頻率在10kHz的情況。因為仿真中,磁芯的磁導率假設為線性的,而實際中的鐵氧體磁特性用非線性的B-H磁滯回線來表示的,所以仿真和實測值存在的一定的誤差。
三維仿真數據與二維仿真數據對比
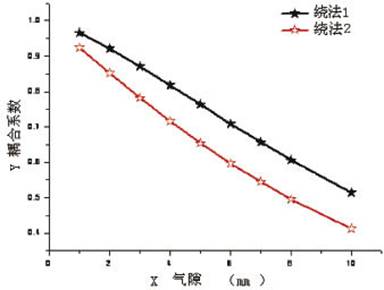
為了檢驗三維仿真的準確性,將其與以前做過的二維仿真進行對比,仿真環境:初級電壓15V正弦波,負載100Ω,氣隙1mm;通過變化頻率,觀察次級感應電壓與傳輸效率的變化,如圖6、圖7所示。

圖6 效率曲線對比圖
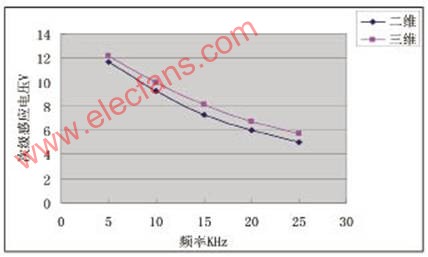
圖7 次級感應電壓曲線對比圖
由上圖可知,三維仿真與二維仿真在變化頻率時,二者曲線走勢基本一致,但由于選擇的實體單元、設置參數的方式以及分析方法等方面的不同,所以存在一定的誤差。
結論
利用ANSYS對松耦合變壓器進行建模仿真,可以改變變壓器的關鍵參數,利用場路耦合可以改變負載等參數,求出初級次級的電流電壓,然后求出變壓器的效率;通過改變松耦合變壓器的主要參數,可以得到影響松耦合變壓器效率的關鍵參數以及它們對松耦合變壓器效率的影響規律;尤其ANSYS三維仿真,不受模型形狀的限制,可以隨意改變變壓器模型,進而推動對松耦合變壓器的研究。
作為旋轉導向智能鉆井系統核心部件的可控偏心器,其原理是利用電機泵產生推動翼肋伸縮的動力, 當采用電機泵動力時,電機泵的能量來源于井下渦輪發電機。由于可控偏心器的機械結構決定了電機泵要安裝在不旋轉套上,而發電機要安裝在旋轉的主軸上,這樣就涉及到旋轉和不旋轉之間的能量傳輸問題。以前一直采用的是接觸式滑環能量傳輸方式,由于接觸式滑環存在安裝不方便、旋轉時易磨損、易受到井下鉆井液、水的腐蝕以及泥漿的影響等缺陷,迫切需要一種新的非接觸式能量傳輸方式——松耦合電能傳輸技術。作為松耦合電能傳輸技術的核心部分——松耦合變壓器,對它的研究則顯得尤為重要。
對于井下惡劣的環境以及空間等各方面因素的限制,我們對松耦合變壓器的研究存在較大困難,而ANSYS的實體建模能力可以快速精確地模擬三維松耦合變壓器。ANSYS三維仿真無論是建模、網格劃分還是后處理,都有它自己獨特的優點,尤其是在后處理中,可以觀察出各個方向的電磁力、磁感應強度、磁動勢等。下面就介紹ANSYS10.0軟件在松耦合變壓器中的三維仿真分析過程。
松耦合變壓器的ANSYS三維仿真
針對松耦合變壓器,我們采用了磁矢量位方法進行仿真。磁矢量位方法(MVP)是ANSYS支持的三維靜態、諧波和瞬態分析的兩種基于節點分析方法中的一個。矢量位方法在X、Y和Z方向分別具有磁矢量位AX、AY、AZ。在載壓或電路耦合分析中還引入了另外三個自由度:電流(CURR),電壓降(EMF)和電壓(VOLT)。3-D矢量位方程中,用INFIN111遠場單元(AX、AY、AZ三個自由度)來為無限邊界建模。
單元類型選擇,實常數及材料屬性設置
場路耦合可用于2維和3維仿真,建立電路單元需要用CIRCUI24單元進行建模,將建立好的電路模型與有限元實體模型進行耦合。其中實體模型可選擇PLAN53(2D)、SOLID97(3D)和SOLIDll7(3D-20node)單元。對于節點法3-D分析,可選的單元為3D 矢量位SOLID97單元,與2D單元不同,自由度為:AX,AY,AZ,AX,AY,AZ,CUR,EMF;線圈實常數設置與材料屬性設置如表1、表2。
表1:線圈實常數
表2:材料屬性
實體建模
松耦合變壓器材料為錳鋅鐵氧體,結構為上下罐狀磁環,按照磁環實際尺寸可建立三維模型。應用ANSYS10.0的Emag模塊對變壓器進行三維場路耦合仿真分析,變壓器物理模型如圖1所示。分析過程如下:
圖1 變壓器實物圖
根據圖1所示變壓器物理模型進行實體建模,通過命令流或GUI方法對模型進行自上而下的建模,三維模型如圖2所示。
圖2 ANSYS三維模型
然后進行網格劃分,同樣也可以采用GUI和命令流兩種操作,網格劃分有多種劃分方式,在這里主要采用了三維自由網格劃分。
建立電路模型
建立獨立電壓源,電壓設置為正弦電壓源。并設置電壓源的幅度、頻率、相位等參數。
建立絞線圈的電路模型,對其實常數和單元類型等參數進行設置。
對線圈內阻進行電路模型設置,電阻的大小由萬用表測得。
次級線圈加負載R3工作。全部模型建立完畢如圖3所示。
進行瞬態分析求解
耦合絞線圈所有節點的CURR自由度,施加邊界條件。
如果加載的電壓15V,頻率10kHz,磁環中間氣隙1mm,負載100Ω,在一個正弦周期內用16個載荷步,則每個載荷步的時間間隔為6.25e-6s。每個載荷步又分為5個子步來實現。在本文中施加20個載荷步后進行求解。
后臺處理,結果觀察
3-D矢量分析得不到通量線(磁力線),但可利用磁通密度矢量顯示來觀察通量路徑。使用Post1通用后臺處理器觀察最后載荷步結果磁感應強度B矢量圖,如圖4所示。
圖3 場路耦合有限元模型
使用Post26時間歷程后臺處理器查看次級負載R3的感應電動勢,并輸出曲線圖,如圖5所示。
圖5 次級負載感應電動勢曲線圖
三維仿真數據與實測數據對比
為了分析方便,在仿真時將磁芯設為線性導磁材料,相對磁導率定為:2500;不考慮渦流損耗;氣隙間距:1mm;初級電壓加幅值為15V的正弦波,頻率為10kHz;負載為100Ω。根據上面分析,實驗數據與仿真數據如表3所示:
表3:實測與仿真數據對比
從表3的分析對比可以看出,三維仿真和實測的效率誤差在5%左右。其中次級的電流電壓值基本和實際測量的電流電壓值相符合。篇幅所限,表中只列出初級電壓在15V,頻率在10kHz的情況。因為仿真中,磁芯的磁導率假設為線性的,而實際中的鐵氧體磁特性用非線性的B-H磁滯回線來表示的,所以仿真和實測值存在的一定的誤差。
三維仿真數據與二維仿真數據對比
為了檢驗三維仿真的準確性,將其與以前做過的二維仿真進行對比,仿真環境:初級電壓15V正弦波,負載100Ω,氣隙1mm;通過變化頻率,觀察次級感應電壓與傳輸效率的變化,如圖6、圖7所示。
圖6 效率曲線對比圖
圖7 次級感應電壓曲線對比圖
由上圖可知,三維仿真與二維仿真在變化頻率時,二者曲線走勢基本一致,但由于選擇的實體單元、設置參數的方式以及分析方法等方面的不同,所以存在一定的誤差。
結論
利用ANSYS對松耦合變壓器進行建模仿真,可以改變變壓器的關鍵參數,利用場路耦合可以改變負載等參數,求出初級次級的電流電壓,然后求出變壓器的效率;通過改變松耦合變壓器的主要參數,可以得到影響松耦合變壓器效率的關鍵參數以及它們對松耦合變壓器效率的影響規律;尤其ANSYS三維仿真,不受模型形狀的限制,可以隨意改變變壓器模型,進而推動對松耦合變壓器的研究。









 工商網監
工商網監
評論