 電子發燒友App
電子發燒友App


摘 要:本文簡要介紹DDS器件AD9858的系統結構和基本原理,以及使用AD9858實現復雜雷達信號源的原理和方法,并以AD9858產生二相碼為例,說明了AD9858的基本特點和使用中應該注意的一些問題。
關鍵詞:復雜雷達信號源;二相碼;DDS;AD9858
引言
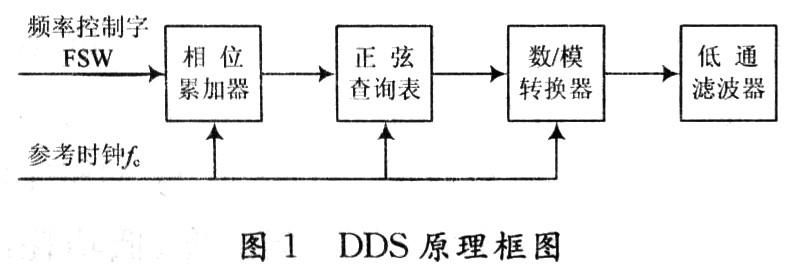
20世紀70年代以來,隨著數字集成電路和微電子技術的發展,出現了DDS(直接數字式頻率合成)技術,它從相位的概念出發進行頻率合成,采用了數字采樣存儲技術,具有相位精確、頻率分辨率高、轉換時間短等突出的優點。高性能DDS技術結合DSP技術、大規模可編程邏輯器件技術使得實現線性調頻相位編碼混合信號成為可能。
AD9858簡介
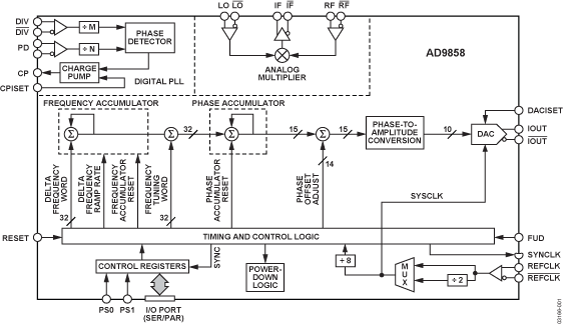
---AD9858的10位數摸轉換器可工作到1GSPS,可產生400MHz的頻率捷變模擬輸出正弦波,具有快速調頻和細微的頻率分辨率(32位頻率分辨率)。內部有集成的電荷泵(CP)和相頻檢測器(PFD),可以將高速DDS和鎖相環(PLL)結合使用。片內模擬混頻器又可使DDS、PLL和混頻器結合使用。AD9858可對對輸入時鐘進行二分頻,這樣外部輸入時鐘可以高達2GHz。
---AD9858有三種工作模式:單音頻、頻率掃描和全睡眠模式,在任何一種模式下射頻模塊(PFD、CP、混頻器)可以使用或不使用,可以處于活動或低功耗狀態。單音頻模式下,AD9858產生由內部寄存器FRW控制的單頻輸出信號。頻率可以任意改變,頻率跳變的速度與刷新相應寄存器的速度有關。假如想得到快速跳頻,可以通過外部引腳來選擇4個存儲在寄存器中的頻率值來實現。頻率掃描模式可以自動完成頻率掃描工作,產生線性調頻或實現其他頻率掃描應用,而且不受I/O口對多寄存器操作時的速度限制。AD9858有并行和串行兩種編程模式,有4個相互獨立的工作組(profile 0~3),每個工作組由32位的頻率調制字(FTWx)和4個14位的相位補償字(POWx)組成,4個工作組之間由外部引腳PS0和PS1進行切換,其對應關系如表1所示。
---無論AD9858工作于哪種工作模式,分別設定Profile工作組的FTWx和POWx,通過改變PS1和PS0的值,就可以同時改變信號的頻率和相位,而且相位的改變可以是絕對調相或相對調相,這正是AD9858實現混合調制的關鍵。相對于較早前使用的DDS器件AD9854,AD9858大大縮短了碼元間的轉換時間。因為AD9854僅有一個相位補償器(POW),這使得AD9854只有通過外部更新信號來改變相位補償器的內容,以實現相位調制,所以AD9854碼元轉換時間較長。
---參數寫入AD9858的寄存器后,只需產生PS0和PS1的控制時序就可以產生相應的二相碼。例如用AD9858產生二相碼時,首先通過并行模式或串行模式把頻率和相位參數寫入相應的FTWx和POWx,4個工作組中每2個工作組中的參數相同。這樣通過選擇PS0和PS1就可以輸出二相碼。
---值得注意的是,這里使用了4個工作組,其中2個工作組中的POW為0,另外2個工作組中的POW為π。當相鄰的兩個子碼的相位相同時,可以將輸出改為參數相同的另一個工作組進行輸出,這樣可以保證相位的準確性。如果只使用2個工作組來輸出二相碼,就需要用到外部更新信號FUD,通過外部控制器(如ADSP21065L)重新更新AD9858寄存器的內容,來保證相位的準確,這樣不但增加了碼元的轉換時間,而且控制也會變得復雜。
?
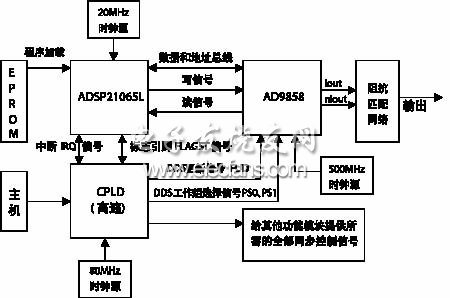
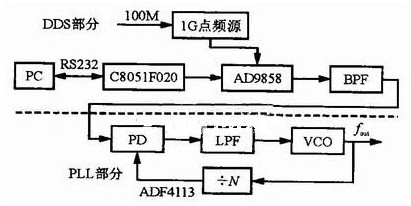
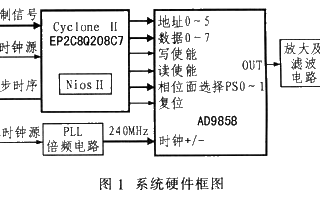
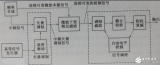
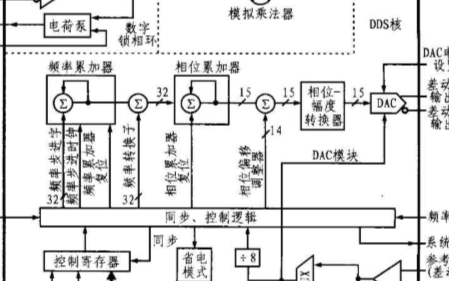
---線性調頻相位編碼混合調制信號源系統的框圖如圖1所示,主要由AD9858、DSP處理器ADSP21065L和CPLD構成。
---CPLD的作用是產生整個DDS系統需要的全部同步控制信號,接受主機提供的控制信號和波形參數選擇信號,產生相應的ADSP21065L中斷信號。ADSP21065L根據中斷信號來確定雷達工作波形,產生相應工作參數,然后對AD9858進行相應的初始化和置數。CPLD還將波形參數、工作模式等信息通過I/O端口發送給雷達發射機、信號處理機等相應的其他處理單元。用CPLD來控制AD9858具有工作波形穩定、時序容易控制、精度高和后期調試簡單的優點。AD9858是信號源的核心,在接收ADSP21065L的參數后,確定相應的工作狀態,等待CPLD產生相應的控制信號,輸出相應的波形。AD9858輸出的信號經過阻抗匹配網絡后,輸出混合調制信號。
實驗結果和結論
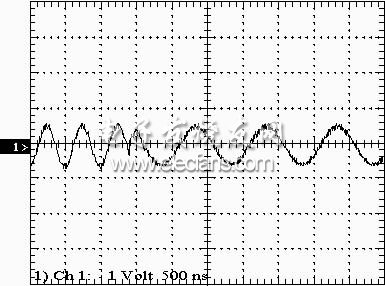
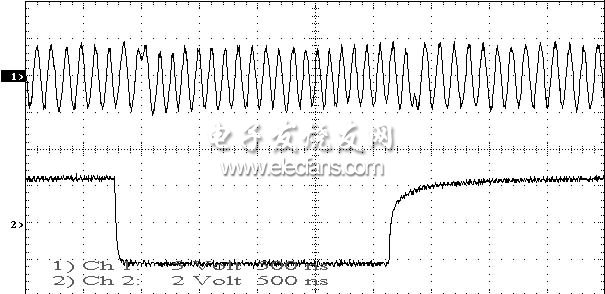
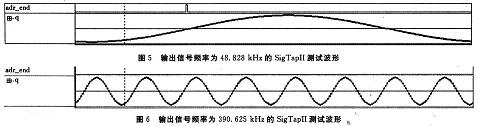
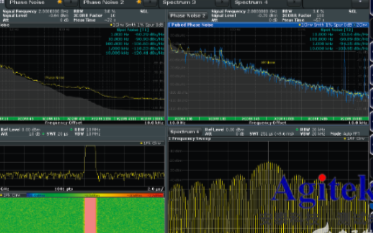
---在實際產生二相碼的時候,由于通過外部引腳PS0和PS1的變化來改變二相碼的子碼轉換,這個過程中不可避免地會使子碼與子碼之間有一定的轉換時間,轉換時間主要取決于AD9858的外部更新信號FUD。子碼轉換如圖2所示,系統為40MHz時,子碼1頻率為2MHz、初相為0°,子碼2頻率為1MHz、相位為180°,圖3是圖2的局部放大示圖。

?
?
---由圖可見,子碼1到子碼2的碼元轉換時間約200ns,基本等于AD9858的FUD時間。如果將系統時鐘提高到400~500MHz時,FUD的時間可以縮短到20ns以下。因此,可以通過提高系統時鐘頻率來減小子碼間的轉換時間。
?
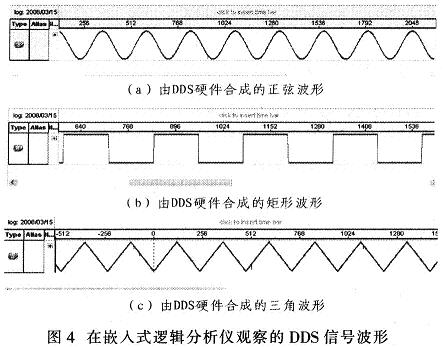
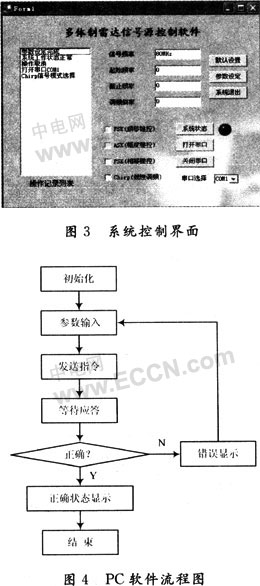
---圖4是時鐘為100MHz時的二相碼調制波形。其中PS0為0時,是初相位為0°的余弦輸出;PS0為1時,是初相位為180°的余弦輸出。從圖中可以看出,碼間轉換時間小于100ns。因此,提高時鐘工作頻率可以進一步縮短碼間的轉換時間。實際使用表明,基于AD9858的雷達信號源工作平穩,精度高,而且工作帶寬也較大,可穩定工作于500MHz。
結束語
---采用該芯片設計的信號源結構簡單、功能強大、抗干擾性優越,具有良好的性價比。

















 工商網監
工商網監
評論