 電子發燒友App
電子發燒友App


本文將給讀者介紹我制作的另一部由74HC240作為主控核心的尋光機器人,依然貫徹低技術、低成本的制作理念,與大家共賞。
控制核心的深入分析
施密特觸發器
施密特觸發器的閥值電壓決定了系統的給定值,施密特觸發器的特性也就決定了這個系統的特性。因此有必要深入了解一下這個器件的特點。
施密特觸發器是由美國科學家Otto Herbert Schmitt于1934年發明的,當時他只是一個研究生。事后三年,他在其博士論文中將這一發明描述為“Thermionic Trigger”。這一發明是他對魷魚神經中的神經脈沖傳播進行研究的直接成果。在電子學中,施密特觸發器是包含了正反饋的比較器電路。施密特觸發器也有兩個穩定狀態,但與一般觸發器不同的是,施密特觸發器采用電位觸發方式,其狀態由輸入信號電位維持;對于負向遞減和正向遞增兩種不同變化方向的輸入信號,施密特觸發器有不同的閥值電壓。施密特觸發器是一種特殊的門電路,與普通的門電路不同,施密特觸發器有兩個閾值電壓,分別稱為正向閥值電壓和負向閥值電壓。在輸入信號從低電平上升到高電平的過程中使電路狀態發生變化的輸入電壓稱為正向閥值電壓,在輸入信號從高電平下降到低電平的過程中使電路狀態發生變化的輸入電壓稱為負向閥值電壓。正向閥值電壓與負向閥值電壓之差稱為回差電壓。對于標準施密特觸發器,當輸入電壓高于正向閥值電壓,輸出為高;當輸入電壓低于負向閥值電壓,輸出為低;當輸入在正負向閥值電壓之間,輸出不改變,也就是說輸出由高電平翻轉為低電平,或是由低電平翻轉為高電平對應的閥值電壓是不同的。只有當輸入電壓發生足夠的變化時,輸出才會變化。這種雙閥值動作被稱為遲滯現象,表明施密特觸發器有記憶性,可用于在開環配置中的抗干擾。
改進版的控制核心
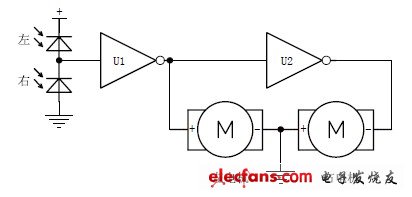
圖2為改進版的尋光機器人,核心部分由一對光敏二極管和74HC240集成電路構成。74HC240是一片功能強大的三態緩沖器,芯片內部集成了8路帶有施密特觸發器輸入特性的反向緩沖器。在數字計算機中,這類緩沖器的作用是用來暫時存放處理器送往外設的數據,有了數控緩沖器,就可以使高速工作的CPU部分與慢速工作的外設起協調和緩沖作用,實現數據傳送的同步。這個改進版的尋光機器人,因為有了74HC240的加盟,使得機器人的控制系統即可以繼承到上文所介紹的施密特觸發器的全部好處,又可以借助緩沖器的作用,來協調機器人電子部分與機械結構之間的配合。實際制作完成以后的機器人運行方式,介于模擬控制與數字控制之間,因此它的設計者也給它起了一個形象的名字“Bare Bones Photovore”,我把它翻譯為“準系統尋光機器人”。線路圖中的U1和U2分別各代表了74HC240芯片內一組并聯工作的驅動器。
?
圖2 74HC240尋光機器人線路圖
圖3是74HC240的框圖,可以看到芯片內部由兩組帶有使能輸入端的反向緩沖器組成,輸入端和輸出端分別為A1, A2, A3,A4, B1, B2, B3, B4(對應管腳2, 4, 6, 8, 11, 13, 15, 17);YA1,YA2, YA3, YA4, YB1, YB2, YB3, YB4(對應管腳 18, 16, 14, 12, 9, 7,5, 3)。使能輸入端為Enable A, Enable B (對應管腳1, 19),電源正(對應管腳20),電源地(對應管腳10)。

?
圖3 74HC240內部圖
緩沖器分為兩種,常規緩沖器和三態緩沖器。常規緩沖器總是將值直接輸出,用在推進電流到高一級的電路系統。三態緩沖器除了常規緩沖器的功能外,還設置有使能輸入端,這里對應的是74HC240的第1腳和第19腳。從圖4的真值表中可以看出當使能端電平不同時緩沖器有不同的輸出值。當Enable A,Enable B=0時,芯片選通,緩沖器工作;當Enable A, EnableB=1,緩沖器被阻止,無論輸入什么值,輸出的總是高阻抗狀態,用Z表示。高阻抗狀態能使電流降到足夠低,以致于類似緩沖器的輸出沒有與任何電路相連。

?
圖4 74HC240真值表
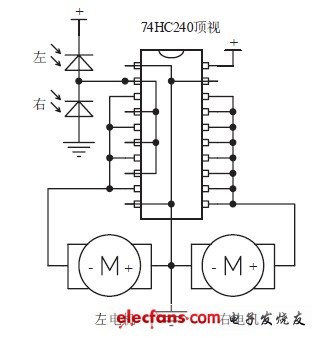
在這部尋光機器人里,74HC240內部的緩沖器是工作在選通狀態,故需要把芯片的第1腳、19腳接低電平(電源地),另外還需注意,74HC240內部緩沖器的單路輸出電流只有35mA,在實際應用中,需要多組緩沖器并聯以獲得足夠的輸出電流,才能驅動減速電機安全有效的工作。我在制作中,使用2片74HC240,16只緩沖器分成兩組各8路并聯,U1和U2的輸出端可以獲得最大280mA的輸出電流,足已驅動常見的小型減速電機。由此可以規劃出一個系統的實際接線圖,對制作很有幫助,見圖5。
?
圖5 74HC240尋光機器人接線圖
機器人的實際制作
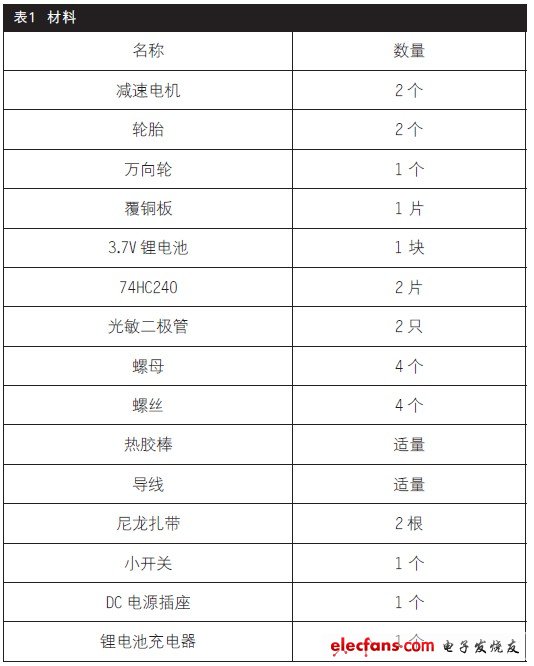
下面是我制作74HC240尋光機器人的過程。因為74HC240機器人移動平臺的結構和制作方法與上一期的NE555尋光機器人相同,這里不再鰲述。見表1。
?
電子控制部分的全部材料,與NE555尋光機器人相同,依然使用紅外線接收管作為光敏器件,把它們反相串聯,接在+3.7V電源與地之間。為了使控制部分獲得足夠的輸出電流驅動電機,需要使用兩片74HC240,把它們疊加焊接在一起工作。
控制核采用BEAM仿生機器人常用的“DEAD BUG”的焊接方式。使用這種手法建造電路的特點是把集成電路管腳朝上,在管腳上進行外圍元件的搭棚焊接,它好處是可以迅速搭建起一個功能電路,另外完成的作品兼具一點藝術性。
我們可以把圖6看做一個硅基的大腦,從電路功能和表現形式上都比較符合。注意把需要的連接外部設備的端口留出適當的長度,方便搭焊導線。圖7為安在機器人頭部的“大腦”特寫,為了美觀和增加氣氛,我用塑料包裝板給它做了透明蓋。
?
圖6 為焊接完畢的控制核,頂視圖
?
圖7 機器人的大腦
圖8為機器人底部,鋰電池直接粘在減速電機上。因為74HC240的工作電壓范圍比較寬2~6V,這樣在電源的選擇上就很靈活,可以使用我偏好的3.7V鋰電池。而NE555的最低工作電壓是4.5V,在電源的選擇上就有很大的局限性。圖9為總體裝配完畢的74HC240尋光機器人。
?
圖8 機器人底部
?
圖9 74HC240尋光機器人
機器人的運行效果
根據光線的變化,機器人的步態呈現出一種不規則的步進形式,非常類似單片機控制下的PWM電機驅動效果,只是74HC240機器人的步態完全是自發的。通過仔細的觀察,機器人的主要行為模式可以總結為:當它向著一個固定光源前進,沒有周圍的干擾,兩個電機將以左右交替觸發的方式步進運轉,每執行一步,輪胎轉動的角度大概在30~350°(取決于光源強度)。從能量的利用角度看,它也優于NE555尋光機器人,74HC240機器人的兩只電機是緩沖器分別觸發啟停,間歇工作,非常經濟。而NE555機器人的兩只電機是串聯在電源里,啟停會互相牽制,造成執行效率降低和能量的浪費。我使用的是一塊手機拆下的800mAH的鋰電池(實際容量小于800mAH),充滿實測機器人的持續運行時間超過90分鐘。
機器人制作是一項實踐性極強的愛好,需要多加動手實踐,才能體會到電路和結構的特點。









 工商網監
工商網監
評論