 電子發(fā)燒友App
電子發(fā)燒友App


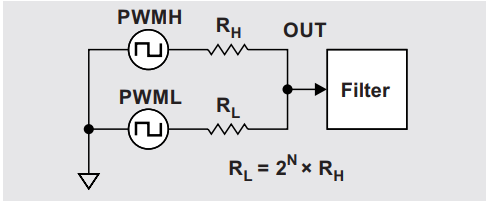
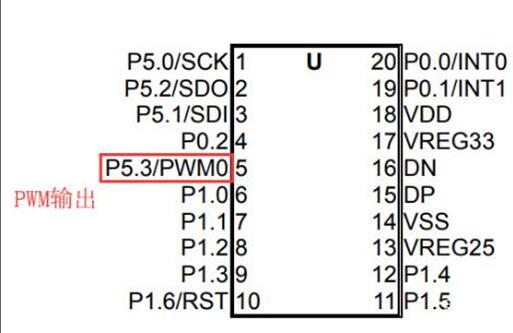
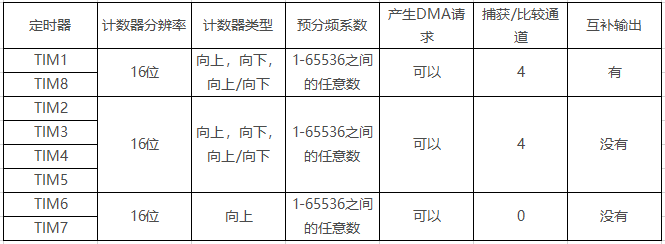
脈沖寬度調(diào)制(PWM),是英文“ Pulse Width Modulation” 的縮寫,簡稱脈寬調(diào)制,是利用微處理器的數(shù)字輸出來對模擬電路進行控制的一種非常有效的技術(shù)。簡單一點,就是對脈沖寬度的控制。STM32 的定時器除了 TIM6 和 7。其他的定時器都可以用來產(chǎn)生 PWM 輸出。其中高級定時器 TIM1 和 TIM8 可以同時產(chǎn)生多達 7 路的 PWM 輸出。而通用定時器也能同時產(chǎn)生多達 4路的 PWM 輸出。


CCR1:捕獲比較(值)寄存器(x=1,2,3,4):設(shè)置比較值。
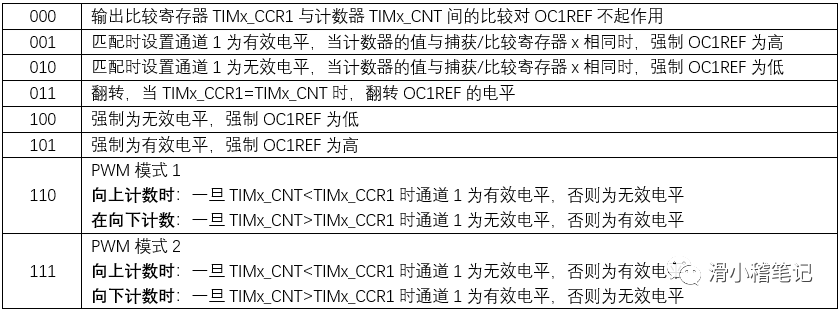
CCMR1: OC1M[2:0]位:對于PWM方式下,用于設(shè)置PWM模式1【110】或者PWM模式2【111】、CCER:CC1P位:輸入/捕獲1輸出極性。0:高電平有效,1:低電平有效。CCER:CC1E位:輸入/捕獲1輸出使能。0:關(guān)閉,1:打開。
實驗內(nèi)容:使用 TIM3 的通道 2,把通道 2 重映射到 PB5, 產(chǎn)生 PWM 來控制 DS0 的亮度。
實驗步驟
1、使能定時器3和相關(guān)IO口時鐘。
使能定時器3時鐘:RCC_APB1PeriphClockCmd();
使能GPIOB時鐘:RCC_APB2PeriphClockCmd();
2、初始化IO口為復(fù)用功能輸出。函數(shù):GPIO_Init();
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
3、這里我們是要把PB5用作定時器的PWM輸出引腳,所以要重映射配置,
所以需要開啟AFIO時鐘。同時設(shè)置重映射。
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);
4、初始化定時器:ARR,PSC等:TIM_TimeBaseInit();
5、初始化輸出比較參數(shù):TIM_OC2Init();
6、使能預(yù)裝載寄存器: TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
7、使能定時器。TIM_Cmd();
8、不斷改變比較值CCRx,達到不同的占空比效果:TIM_SetCompare2();
代碼
#include “led.h”
#include “delay.h”
#include “usart.h”
#include “time.h”
#include “pwm.h”
int main()
{
u16 led0pwmval = 0;
u8 dir = 1;
delay_init();
LED_Init();
TIM3_CH2_PWM_Init(899, 0); // 不分頻,PWM 頻率= 72000/900 = 80KHz;
while(1)
{
delay_ms(10);
if(dir)
led0pwmval++;
else
led0pwmval--;
if (led0pwmval 》 300)
dir = 0;
if (led0pwmval == 0)
dir = 1;
TIM_SetCompare2(TIM3, led0pwmval);
}
}
123456789101112131415161718192021222324252627282930313233343536
pwm.h
#ifndef __PWM_H
#define __PWM_H
#include “sys.h”
void TIM3_CH2_PWM_Init(u16 arr, u16 fprer);
#endif
12345678910
pwm.c
#include “pwm.h”
void TIM3_CH2_PWM_Init(u16 arr, u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
// 使能TIM3的時鐘;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
// 復(fù)用時鐘使能;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
// GPIOB時鐘使能;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
// TIM3_CH2部分重映射到PB.5上;
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3,ENABLE);
// 設(shè)置PB.5為復(fù)用功能輸出;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
// 初始化TIM3;
TIM_TimeBaseInitStruct.TIM_ClockDivision = 0; // 設(shè)置時鐘分割;
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; // 向上計數(shù)方式;
TIM_TimeBaseInitStruct.TIM_Period = arr; // 設(shè)置自動重裝載值;
TIM_TimeBaseInitStruct.TIM_Prescaler = psc; // 設(shè)置分頻系值;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStruct);
// 設(shè)置TIM3_CH2的PWM模式
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM2; // 選擇PWM模式2;
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable; // 比較輸出使能;
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High; // 輸出極性高;
TIM_OC2Init(TIM3, &TIM_OCInitStruct);
// 使能預(yù)裝載寄存器;
TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable);
// 使能TIM3;
TIM_Cmd(TIM3,ENABLE);
}












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論