 電子發(fā)燒友App
電子發(fā)燒友App


摘要:數(shù)字通信系統(tǒng)中,碼元同步對(duì)于實(shí)現(xiàn)信號(hào)的準(zhǔn)確判決碼元和降低系統(tǒng)誤碼率起著關(guān)鍵作用。本文介紹了在ADS仿真環(huán)境下實(shí)現(xiàn)16QAM接收機(jī)碼元同步算法。采用的定時(shí)誤差提取算法消除了傳統(tǒng)算法在16QAM系統(tǒng)中引起的時(shí)鐘抖動(dòng)問題,實(shí)現(xiàn)了接收信號(hào)和發(fā)送信號(hào)同步。并對(duì)該算法在ADS環(huán)境下進(jìn)行了仿真,仿真結(jié)果表明該算法實(shí)現(xiàn)了碼元同步的功能,并對(duì)干擾有較強(qiáng)的抵抗能力。
0 引言
在數(shù)字接收機(jī)中,為了在抽樣判決時(shí)刻準(zhǔn)確判決發(fā)送過來的碼元,需要提供一個(gè)確定抽樣判決時(shí)刻的定時(shí)脈沖序列。這個(gè)定時(shí)脈沖序列的重復(fù)頻率必須與發(fā)送的數(shù)碼脈沖序列一致(即接收、發(fā)送雙方必須同步,具有相同的主頻率),同時(shí)在最佳判決時(shí)刻對(duì)接收碼元進(jìn)行抽樣判決。這樣的定時(shí)脈沖序列稱為碼元同步。
16QAM(Quadrature Amplitude Modulation)接收機(jī)要完成16QAM信號(hào)的解調(diào)首先要完成碼元同步,再通過隨后的均衡、載波恢復(fù)等模塊完成信號(hào)的解調(diào)。因此碼元同步算法的實(shí)現(xiàn)是至關(guān)重要的一部分。
1 碼元定時(shí)同步原理及其在ADS中的設(shè)計(jì)
數(shù)字化的解調(diào)器中,經(jīng)過下變頻所得的基帶信號(hào)通過匹配濾波器,然后以時(shí)鐘周期為Ts的固定采樣頻率進(jìn)行采樣、量化后進(jìn)入碼元同步環(huán)路。
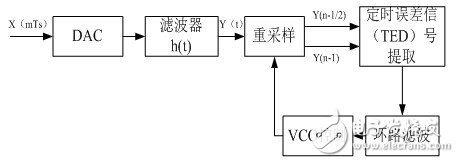
圖1 碼元同步模塊的結(jié)構(gòu)
在論文中,具體采用的定時(shí)同步模塊如圖1所示,它由內(nèi)插濾波器(由DAC、濾波器和重采樣等效實(shí)現(xiàn))、定時(shí)誤差提取(TED)、環(huán)路濾波器以及VCO控制器組成。從圖中可看出:信號(hào)經(jīng)過內(nèi)插后,每個(gè)符號(hào)內(nèi)有兩個(gè)采樣點(diǎn),再進(jìn)行時(shí)鐘誤差提取,得到的誤差信號(hào)經(jīng)過環(huán)路濾波器后送給VCO,最后控制內(nèi)插完成同步。即通過采樣點(diǎn)提取時(shí)鐘控制信號(hào)調(diào)整采樣時(shí)鐘來達(dá)到同步。
下面分別介紹各模塊的原理。
1.1 內(nèi)插濾波器原理
內(nèi)插濾波器實(shí)際上實(shí)現(xiàn)的是一個(gè)數(shù)據(jù)的速率轉(zhuǎn)換可以假設(shè)它的模型如圖2所示。
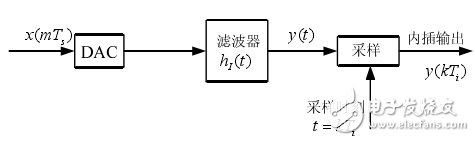
圖2 速率轉(zhuǎn)換
假定接收端固定采樣時(shí)鐘為![]() ,符號(hào)周期為T。內(nèi)插器接收的信號(hào)為
,符號(hào)周期為T。內(nèi)插器接收的信號(hào)為![]() ,通過DAC及濾波器后
,通過DAC及濾波器后![]() ,得到一個(gè)連續(xù)時(shí)間的輸出:
,得到一個(gè)連續(xù)時(shí)間的輸出:
 (1-1)
(1-1)
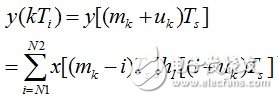
現(xiàn)在,對(duì)于y (t),在每個(gè)時(shí)刻![]() 時(shí)對(duì)其再次進(jìn)行采樣,其中,k為正整數(shù)。T為內(nèi)插器周期,它與符號(hào)周期是同步的。
時(shí)對(duì)其再次進(jìn)行采樣,其中,k為正整數(shù)。T為內(nèi)插器周期,它與符號(hào)周期是同步的。
 (1-2)
(1-2)
對(duì)于上式(5-2),m為輸入序列指針,定義濾波器指針為:
![]() (1-3)
(1-3)
同樣,定義基本指針為:
![]() (1-4)
(1-4)
分?jǐn)?shù)間隔為:
![]() (1-5)
(1-5)
內(nèi)插公式可以重新寫為:
(1-6)
式(1-6)為數(shù)字內(nèi)插濾波器的基本方程。
引入參數(shù)![]() ,
,![]() 是有實(shí)際意義的。它們表示了
是有實(shí)際意義的。它們表示了![]() ,
,![]() 之間的調(diào)整關(guān)系。其中,
之間的調(diào)整關(guān)系。其中, ![]() 決定了計(jì)算第k個(gè)內(nèi)插值
決定了計(jì)算第k個(gè)內(nèi)插值![]() 的N=N2-N1+1個(gè)信號(hào)樣值,
的N=N2-N1+1個(gè)信號(hào)樣值,![]() 指示了內(nèi)插估值點(diǎn),并決定用來計(jì)算內(nèi)插值
指示了內(nèi)插估值點(diǎn),并決定用來計(jì)算內(nèi)插值![]() 的N個(gè)插值濾波器脈沖響應(yīng)樣值。一般情況下,
的N個(gè)插值濾波器脈沖響應(yīng)樣值。一般情況下,![]() 是個(gè)無理數(shù)且對(duì)每次內(nèi)插都是變化的,直到定時(shí)穩(wěn)定時(shí),
是個(gè)無理數(shù)且對(duì)每次內(nèi)插都是變化的,直到定時(shí)穩(wěn)定時(shí),![]() 將穩(wěn)定在某一個(gè)定值上。
將穩(wěn)定在某一個(gè)定值上。
1.2 定時(shí)誤差(TED)信號(hào)的提取
Gardner碼元同步算法是一種異步時(shí)鐘恢復(fù)方法,本地生成碼元時(shí)鐘,采用插值方法得到抽樣時(shí)刻碼元值,不需要滿足采樣時(shí)鐘與碼元時(shí)鐘是整數(shù)倍關(guān)系的要求。Gardner碼元同步算法中,輸入的基帶信號(hào)經(jīng)過插值后得到2倍碼元速率的抽樣數(shù)據(jù),抽樣數(shù)據(jù)經(jīng)過反饋支路控制數(shù)控振蕩器輸出頻率從而調(diào)整碼元時(shí)鐘,采樣得到最佳采樣點(diǎn),完成時(shí)鐘的鎖定和跟蹤。
Gardner算法不需要判決反饋,每個(gè)數(shù)據(jù)需要兩個(gè)采樣點(diǎn),其中一個(gè)是strobe點(diǎn),即符號(hào)最佳觀察點(diǎn);另一個(gè)是midstrobe點(diǎn),即兩個(gè)最佳觀察點(diǎn)之間的采樣點(diǎn)。一個(gè)在符號(hào)判決點(diǎn)附近,另一個(gè)在兩個(gè)符號(hào)判決點(diǎn)中間附近,并且與載波相位偏差無關(guān),因此定時(shí)調(diào)整可先于載波恢復(fù)完成,定時(shí)恢復(fù)環(huán)和載波恢復(fù)環(huán)相互獨(dú)立,這給解調(diào)器的設(shè)計(jì)和調(diào)試帶來了方便。
假設(shè)接收信號(hào)為:![]() ,式中
,式中![]() 為傳輸?shù)膹?fù)數(shù)數(shù)據(jù),
為傳輸?shù)膹?fù)數(shù)數(shù)據(jù),![]() 為基帶成型濾波波形,對(duì)
為基帶成型濾波波形,對(duì)![]() 的采樣值可能產(chǎn)生定時(shí)誤差,Gardner算法提取的定時(shí)誤差為:
的采樣值可能產(chǎn)生定時(shí)誤差,Gardner算法提取的定時(shí)誤差為:
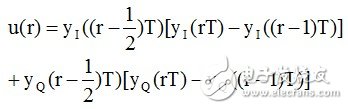
(2-1)
其中索引r表示符號(hào)數(shù)目,同相I和正交Q方向的第r個(gè)符號(hào)的判決值分別表示為![]() 和
和![]() 。同樣,將r和(r-1)兩個(gè)判決點(diǎn)中心位置的采樣值表示為
。同樣,將r和(r-1)兩個(gè)判決點(diǎn)中心位置的采樣值表示為![]() 和
和![]() 。整個(gè)誤差是I和Q兩個(gè)方向的定時(shí)誤差之和,且此誤差與載波相位無關(guān)。
。整個(gè)誤差是I和Q兩個(gè)方向的定時(shí)誤差之和,且此誤差與載波相位無關(guān)。
式中![]() ,
,![]() 表示同相和正交分量,T為符號(hào)周期。Gardner算法適用于跟蹤和捕獲模式。
表示同相和正交分量,T為符號(hào)周期。Gardner算法適用于跟蹤和捕獲模式。
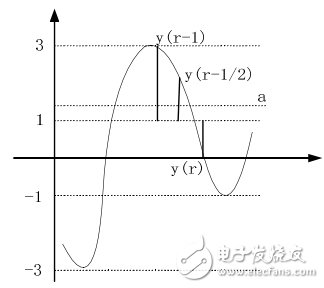
圖3 16QAM解調(diào)后波形
在16QAM調(diào)制信號(hào)中,例如果符號(hào)從-1變?yōu)?,1變?yōu)椋?,-3變?yōu)?,3變?yōu)椋?等的時(shí)候,則沒有定時(shí)誤差時(shí),中間點(diǎn)的平均值應(yīng)為零。而有定時(shí)誤差時(shí),將會(huì)產(chǎn)生一個(gè)非零的值,它的大小與差錯(cuò)的大小成正比。另外一些情況,當(dāng)沒有定時(shí)誤差時(shí),中間點(diǎn)的平均值并不是零。例如符號(hào)從3變?yōu)椋?,當(dāng)沒有定時(shí)誤差時(shí),中間點(diǎn)的平均值是1,如圖3所示。
如果直接把Gardner算法運(yùn)用在16QAM解調(diào)系統(tǒng)中,定時(shí)誤差檢測(cè)的結(jié)果有些點(diǎn)上是正確的,有些點(diǎn)上是錯(cuò)誤的。對(duì)于大量數(shù)據(jù),這些錯(cuò)誤的平均值是零,因?yàn)闆]有定時(shí)誤差的情況,中間點(diǎn)可能是0,-1,1,-2,2,其平均值為零。因此這些錯(cuò)誤會(huì)導(dǎo)致定時(shí)時(shí)鐘的抖動(dòng),通過濾波器可以減小這些抖動(dòng)。
為了消除這些抖動(dòng)。我們對(duì)Gardner算法做了進(jìn)一步改進(jìn),其改進(jìn)后算法為:

(2-2)
其中![]()
當(dāng)定時(shí)超前,誤差為負(fù),定時(shí)滯后,誤差為正。Gardner算法具有兩個(gè)特點(diǎn):一是每個(gè)符號(hào)只需要兩個(gè)采樣點(diǎn),且以碼元速率輸出誤差信號(hào);二是估計(jì)算法是獨(dú)立于載波相位的,不受載波相位偏移的影響,即可以在載波相位同步之前,進(jìn)行定時(shí)誤差估計(jì)。
1.3 壓控振蕩器(VCO Voltage Controlled Oscillator)
定時(shí)恢復(fù)環(huán)的內(nèi)插濾波器由VCO控制,它接受定時(shí)誤差信號(hào),給內(nèi)插濾波器提供內(nèi)插運(yùn)算所需的參數(shù)![]() 和
和![]() ,壓控振蕩器的時(shí)鐘頻率為1/
,壓控振蕩器的時(shí)鐘頻率為1/![]() 。
。
VCO的輸出頻率f(m):
![]() ,
,
![]() 為VCO預(yù)設(shè)基本頻率,
為VCO預(yù)設(shè)基本頻率,![]() 為VCO控制信號(hào),由定時(shí)誤差信號(hào)經(jīng)環(huán)路濾波器濾波后提供,VCO的輸出頻率隨著
為VCO控制信號(hào),由定時(shí)誤差信號(hào)經(jīng)環(huán)路濾波器濾波后提供,VCO的輸出頻率隨著![]() 的變化而變化,當(dāng)
的變化而變化,當(dāng)![]() 穩(wěn)定時(shí),輸出頻率也就保持穩(wěn)定。S為VCO對(duì)誤差信號(hào)的敏感度。VCO輸出每出現(xiàn)一次過零點(diǎn),則產(chǎn)生一個(gè)定時(shí)調(diào)整抽樣脈沖
穩(wěn)定時(shí),輸出頻率也就保持穩(wěn)定。S為VCO對(duì)誤差信號(hào)的敏感度。VCO輸出每出現(xiàn)一次過零點(diǎn),則產(chǎn)生一個(gè)定時(shí)調(diào)整抽樣脈沖![]() ,從而可以決定
,從而可以決定![]() ,也就是決定哪些采樣信號(hào)值參加內(nèi)插運(yùn)算。
,也就是決定哪些采樣信號(hào)值參加內(nèi)插運(yùn)算。
1.4 環(huán)路濾波器
采用二階數(shù)字濾波器對(duì)定時(shí)誤差信號(hào)進(jìn)行濾波如圖4,以減小定時(shí)誤差信號(hào)的抖動(dòng)。環(huán)路濾波器系數(shù)和定時(shí)誤差S曲線系數(shù)以及數(shù)控振蕩器控制靈敏度共同決定環(huán)路相對(duì)等效噪聲帶寬![]() 。
。
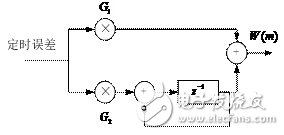
圖4 二階數(shù)字濾波
選定環(huán)路相對(duì)等效噪聲帶寬![]() 和阻尼系數(shù),就可以求出二階數(shù)字濾波的參數(shù)
和阻尼系數(shù),就可以求出二階數(shù)字濾波的參數(shù)![]() ,
,![]() 。
。
2 ADS中的仿真結(jié)果分析
ADS,即HP Advanced Design System的簡(jiǎn)稱。它是Agilent Technologies公司新推出的一套電路輔助設(shè)計(jì)軟件。Agilent Technologies公司把已有產(chǎn)品:HP MDS(Microwave Design System)和HP EEsof IV(Electronic Engineering Software)兩者的精華有機(jī)的結(jié)合起來,并增加了許多新的功能,構(gòu)成了功能強(qiáng)大的ADS軟件。ADS可應(yīng)用于整個(gè)現(xiàn)代通信系統(tǒng)及其子系統(tǒng),能對(duì)通訊系統(tǒng)能進(jìn)行快速、便捷、有效的設(shè)計(jì)和仿真。
ADS軟件分為Digital Signal Processing Network和Analog/RF Network兩個(gè)仿真設(shè)計(jì)模塊。接收機(jī)的仿真是在Digital Signal Processing Network中完成,里面加載了很多常用的通信器件,可供調(diào)用。
在ADS中,建立仿真模型,本文仿真基于16QAM調(diào)制、1.8GHHz中頻、720Mbps碼速率中頻采樣的全數(shù)字解調(diào)系統(tǒng)(如圖5),研究了高速全數(shù)字解調(diào)中碼元同步的關(guān)鍵技術(shù)。
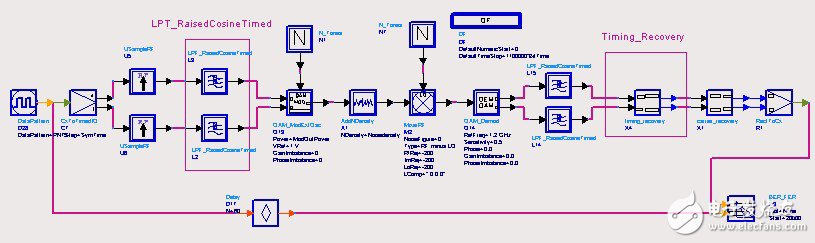
圖5 通信系統(tǒng)誤碼率仿真工程
仿真設(shè)計(jì):1、系統(tǒng)中,碼元的長(zhǎng)度為5.6nsec。在發(fā)送端的低通成型濾波器(LPT_RaiseCosineTimed)中加入2nsc的延時(shí)來仿真碼元抖動(dòng)。
2、改變VCO的預(yù)設(shè)基本頻率![]() 來仿真接受端時(shí)鐘偏差,VCO的敏感度S為1MHz/V。
來仿真接受端時(shí)鐘偏差,VCO的敏感度S為1MHz/V。
仿真結(jié)果:
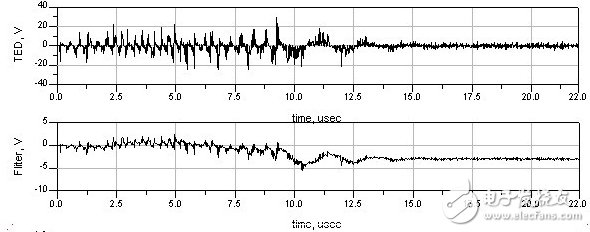
圖6 時(shí)鐘恢復(fù)環(huán)中誤差信號(hào)、環(huán)路濾波后的信號(hào)
圖6為從碼元同步模塊中測(cè)量出來的誤差信號(hào)、環(huán)路濾波后的信號(hào)。從圖中可得出,VCO根據(jù)反饋回來經(jīng)過濾波后的誤差信號(hào)(如圖6下)來實(shí)時(shí)調(diào)整采樣的頻率,直到VCO輸出時(shí)鐘頻率![]() 等于2倍碼元速率為止,就達(dá)到了平衡狀態(tài),此時(shí)定時(shí)誤差為零(如圖6上)。
等于2倍碼元速率為止,就達(dá)到了平衡狀態(tài),此時(shí)定時(shí)誤差為零(如圖6上)。
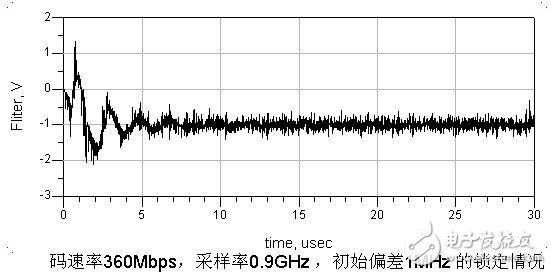
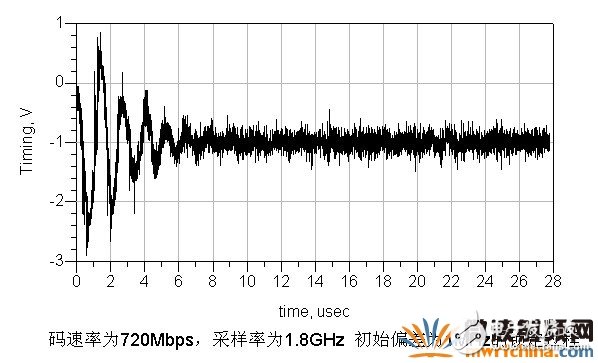
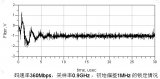
圖7 不同碼元速率的鎖定過程
圖7所示分別為1.8GHz采樣率,碼元速率720Mbps,初始偏差1MHz,信噪比20dB時(shí)碼元同步的鎖定情況;和0.9GHz采樣率,碼速率360MHz,初始偏差1MHz ,信噪比20dB時(shí)碼元同步的鎖定情況。仿真證明這種碼元同步方法能夠正確生成碼元時(shí)鐘滿足高碼速要求,并且適應(yīng)不同碼速率。能正確生成碼元時(shí)鐘滿足高碼速要求,并且適應(yīng)不同碼速率。
測(cè)試環(huán)境
測(cè)試項(xiàng)目無碼元同步模塊時(shí)誤碼率(BER)有碼元同步模塊時(shí)誤碼率(BER)
理想系統(tǒng)4.554E-64.554E-6
抖動(dòng)8.730E-59.039E-6
接收時(shí)鐘偏差Bias=0.5MHz0.0174.554E-6
Bias=1MHz0.0364.554E-6
Bias=1.5MHz0.0414.554E-6
Bias=2MHz0.0540.065
抖動(dòng)和偏差0.0481.937E-5
表1 仿真系統(tǒng)中的碼元抖動(dòng)、時(shí)鐘偏差時(shí)的誤碼率
通過上表說明,如圖5所示的系統(tǒng)中,碼元同步模塊對(duì)于的信號(hào)的抖動(dòng)和接收端時(shí)鐘的頻率偏差有較強(qiáng)的糾正能力。抖動(dòng)為半個(gè)碼元長(zhǎng)度時(shí),模塊將誤碼率從1.730E-5降到了9.039E-6。對(duì)于時(shí)鐘的頻率偏差糾正能力尤為突出,達(dá)到3MHz的范圍(748.5MHz~~751.5MHz)內(nèi)都可以鎖定。當(dāng)同時(shí)加入碼元抖動(dòng)和時(shí)鐘偏差時(shí),系統(tǒng)也表現(xiàn)出了較強(qiáng)的糾錯(cuò)能力。
3 結(jié)束語
本文簡(jiǎn)要介紹了在ADS仿真器中,設(shè)計(jì)一個(gè)16QAM接收機(jī)的碼元同步模塊,以消除恢復(fù)時(shí)鐘偏差和I、Q兩路信號(hào)的不同步引起的碼元抖動(dòng)的問題。并針對(duì)16QAM這種調(diào)制方式,提出了改進(jìn)的誤差提取算法。仿真顯示可以滿足不同速率下的接收機(jī)要求。











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論