 電子發燒友App
電子發燒友App


本文主要是關于svpwm變頻調速的相關介紹,并著重對svpwm與SPWM進行了詳盡的區分介紹。
SVPWM
SVPWM的主要思想是以三相對稱正弦波電壓供電時三相對稱電動機定子理想磁鏈圓為參考標準,以三相逆變器不同開關模式作適當的切換,從而形成PWM波,以所形成的實際磁鏈矢量來追蹤其準確磁鏈圓。傳統的SPWM方法從電源的角度出發,以生成一個可調頻調壓的正弦波電源,而SVPWM方法將逆變系統和異步電機看作一個整體來考慮,模型比較簡單,也便于微處理器的實時控制。
原理
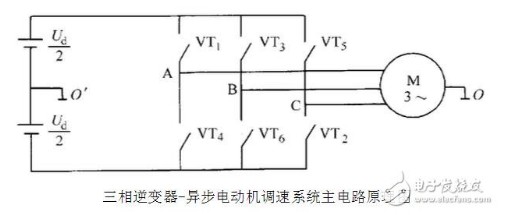
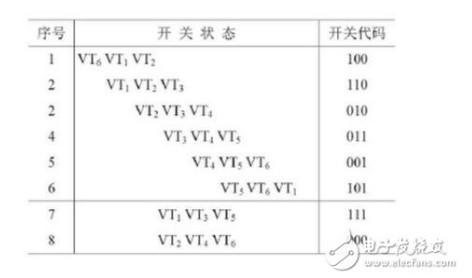
普通的三相全橋是由六個開關器件構成的三個半橋。這六個開關器件組合起來(同一個橋臂的上下半橋的信號相反)共有8種安全的開關狀態。 其中000、111(這里是表示三個上橋臂的開關狀態)這兩種開關狀態在電機驅動中都不會產生有效的電流。因此稱其為零矢量。另外6種開關狀態分別是六個有效矢量。它們將360度的電壓空間分為60度一個扇區,共六個扇區,利用這六個基本有效矢量和兩個零量,可以合成360度內的任何矢量。
當要合成某一矢量時先將這一矢量分解到離它最近的兩個基本矢量,而后用這兩個基本矢量去表示,而每個基本矢量的作用大小就利用作用時間長短去代表。用電壓矢量按照不同的時間比例去合成所需要的電壓矢量。從而保證生成電壓波形近似于正弦波。
在變頻電機驅動時,矢量方向是連續變化的,因此我們需要不斷的計算矢量作用時間。為了計算機處理的方便,在合成時一般是定時器計算(如每0.1ms計算一次)。這樣我們只要算出在0.1ms內兩個基本矢量作用的時間就可以了。由于計算出的兩個時間的總和可能并不是0.1ms(比這小),而那剩下的時間就按情況插入合適零矢量。 由于在這樣處理時,合成的驅動波形和PWM很類似。因此我們還叫它PWM,又因這種PWM是基于電壓空間矢量去合成的,所以就叫它SVPWM了。
svpwm變頻調速原理
SVPWM原理
電壓空間矢量PWM(SVPWM)的出發點與SPWM不同,SPWM調制是從三相交流電源出發,其著眼點是如何生成一個可以調壓調頻的三相對稱正弦電源。而SVPWM是將逆變器和電動機看成一個整體,用八個基本電壓矢量合成期望的電壓矢量,建立逆變器功率器件的開關狀態,并依據電機磁鏈和電壓的關系,從而實現對電動機恒磁通變壓變頻調速。若忽略定子電阻壓降,當定子繞組施加理想的正弦電壓時,由于電壓空間矢量為等幅的旋轉矢量,故氣隙磁通以恒定的角速度旋轉,軌跡為圓形。
SVPWM比SPWM的電壓利用率高15%,這是兩者最大的區別,但兩者并不是孤立的調制方式,典型的SVPWM是一種在SPWM的相調制波中加入了零序分量后進行規則采樣得到的結果,因此SVPWM有對應SPWM的形式。反之,一些性能優越的SPWM方式也可以找到對應的SVPWM算法,所以兩者在諧波的大致方向上是一致的,只不過SPWM易于硬件電路實現,而SVPWM更適合于數字化控制系統。
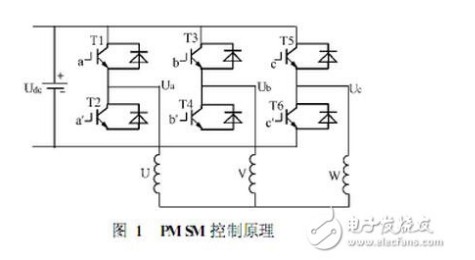
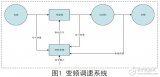
圖 1中,開關矢量[ a b c ]T共有8種取值,即6個IGBT的開關狀態的組合一共有8個,這8種開關組合決定了8個基本空間矢量,如圖3所示。將兩個相鄰的基本空間矢量 U0和 U60所包圍的電壓Uout映射到和軸6-8上,得到式1,其中 T表示一個 PWM 周期時間長度,T1和T2分別是在一個周期時間T中基本空間矢量U0和U60各自的作用時間,T是零矢量在一個周期中的作用時間,T0+T1+T2=T。
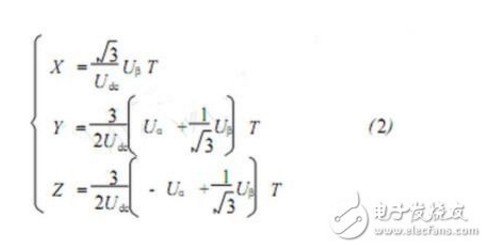
如果定義式2,則可以得到每個扇區中包圍這個扇區的兩個基本矢量在一個PWM周期中的作用時間T1和 T29-10},如表 1所示。
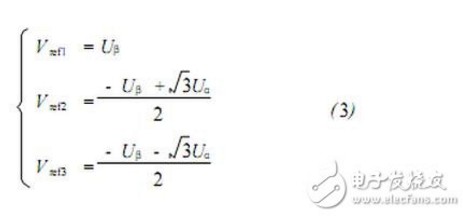
對于式3,定義3個變量a,b,c,如果Vref1》0,則a=1,否則a=0;如果 Vref2》0,則 b=1,否則b=0;如果Vref3》0,則c=1,否則c=0。設N=4c+2b+a,則很容易得到N與扇區數sector的對應關系,如表1。
為了保證三相橋臂在一個PWM周期中導通的占空比,所應設置的比較值分別定義為Tcm1,Tcm2和Tcm3,并定義式4,則N與扇區數sector及Tcm 1,Tcm2和Tcm3的關系如表1所示。將Tcm1,Tcm2和Tcm3與設置為連續增 /減模式的DSP芯片定時器進行比較后得到PWM脈沖 ,控制圖1中的3個橋臂的通斷,從而在PM SM的3相定子繞組產生相位差為120°的正弦波形電流 ,形成圓形磁場,驅動電機運轉。
svpwm與SPWM區別
按照波形面積相等的原則,每一個矩形波的面積與相應位置的正弦波面積相等,因而這個序列的矩形波與期望的正弦波等效。這種調制方法稱作正弦波脈寬調制(SPWM),這種序列的矩形波稱作SPWM波。
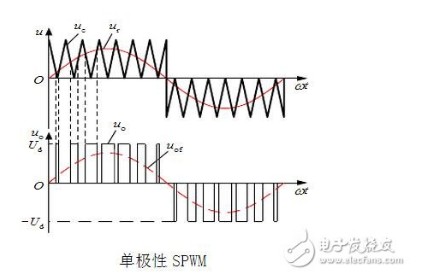
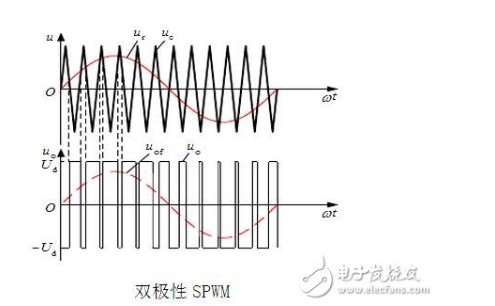
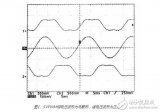
圖為三相PWM波形,其中
urU、urV、urW為U,V,W三相的正弦調制波uc為雙極性三角載波;
uUN’、uVN’、uWN’為U,V,W三相輸出與電源中性點N之間的相電壓矩形波形;
uUV為輸出線電壓矩形波形,其脈沖幅值為+Ud和-Ud;
uUN為三相輸出與電機中點N之間的相電壓。
經典的SPWM控制主要著眼于使變壓變頻器的輸出電壓盡量接近正弦波,并未顧及輸出電流的波形。而電流滯環跟蹤控制則直接控制輸出電流,使之在正弦波附近變化,這就比只要求正弦電壓前進了一步。然而交流電動機需要輸入三相正弦電流的最終目的是在電動機空間形成圓形旋轉磁場,從而產生恒定的電磁轉矩。
如果對準這一目標,把逆變器和交流電動機視為一體,按照跟蹤圓形旋轉磁場來控制逆變器的工作,其效果應該更好。這種控制方法稱作“磁鏈跟蹤控制”,而磁鏈的軌跡是交替是由使用不同的電壓空間矢量得到的,所以又稱“電壓空間矢量PWM(SVPWM,Space Vector PWM)控制”。
隨著逆變器工作狀態的切換,電壓空間矢量的幅值不變,而相位每次旋轉π/3,直到一個周期結束。這樣,在一個周期中6個電壓空間矢量共轉過2π弧度,形成一個封閉的正六邊形。
在一個周期內,6個磁鏈空間矢量呈放射狀,矢量的尾部都在O點,其頂端的運動軌跡也就是6個電壓空間矢量所圍成的正六邊形。
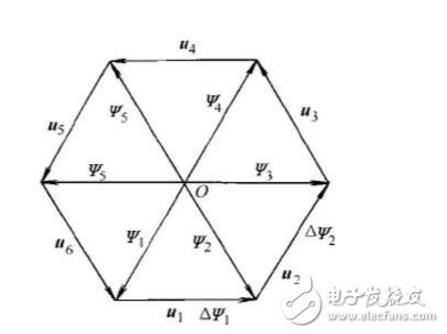
在任何時刻,所產生的磁鏈增量的方向決定于所施加的電壓,其幅值則正比于施加電壓的時間。如果交流電動機僅由常規的六拍階梯波逆變器供電,磁鏈軌跡便是六邊形的旋轉磁場,這顯然不象在正弦波供電時所產生的圓形旋轉磁場那樣能使電動機獲得勻速運行。如果要逼近圓形,可以增加切換次數,設想磁鏈增量由圖中的11,12,13,14這4段組成。這時,每段施加的電壓空間矢量的相位都不一樣,可以用基本電壓矢量線性組合的方法獲得。
傳統的SPWM方法從電源的角度出發,以生成一個可調頻調壓的正弦波電源為目的。SVPWM方法將逆變系統和異步電機看作一個整體來考慮,模型比較簡單,也便于微處理器的實時控制。SVPWM本身的產生原理與PWM沒有任何關系,只是像罷了,SVPWM合成的驅動波形和PWM很類似,因此我們還叫它PWM,又因這種PWM是基于電壓空間矢量去合成的,所以就叫它SVPWM了。
綜上所述,SVPWM與SPWM的原理和來源有很大不同,但是他們確實殊途同歸的。SPWM由三角波與正弦波調制而成,而SVPWM卻可以看作由三角波與有一定三次諧波含量的正弦基波調制而成。相比之下SVPWM的主要有以下特點:
(1)在每個小區間雖有多次開關切換,但每次開關切換只涉及一個器件, 所以開關損耗小。
(2)利用電壓空間矢量直接生成三相PWM波,計算簡單。
(3)逆變器輸出線電壓基波最大值為直流側電壓,比一般的SPWM逆變器 輸出電壓高15%
結語
關于svpwm變頻調速的相關介紹就到這了,希望本文能對你有所幫助。










 工商網監
工商網監
評論