 電子發燒友App
電子發燒友App


來源:EDC電驅未來
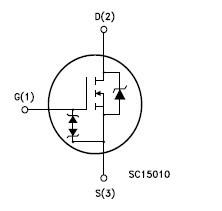
近年來,新型功率開關器件IGBT(圖1)已逐漸被人們所認識,IGBT是由BJT(雙極型三極管)和MOS(絕緣柵型場效應管)組成的復合全控型電壓驅動式功率半導體器件(圖2),IGBT是Insulated Gate Bipolar Transistor的縮寫形式,是絕緣柵雙極型晶體管。與以前的各種電力電子器件相比,IGBT具有以下特點:
①高輸入阻抗,可采用通用低成本的驅動線路;
②高速開關特性,導通狀態低損耗。
IGBT兼有MOSFET的高輸入阻抗和GTR的低導通壓降兩方面的優點。簡單講,是一個非通即斷的開關,IGBT沒有放大電壓的功能,導通時可以看作導線,斷開時當作開路。GTR飽和壓降低,載流密度大,但驅動電流較大;MOSFET驅動功率很小,開關速度快,但導通壓降大,載流密度小。
IGBT綜合了以上兩種器件的優點,驅動功率小而飽和壓降低,是一種適合于中、大功率應用的電力電子器件,IGBT在綜合性能方面占有明顯優勢,非常適合應用于直流電壓為600V及以上的變流系統如交流電機、變頻器、開關電源、照明電路、牽引傳動等領域。
一、IGBT的應用領域及現狀
1.IGBT的應用領域

圖2 IGBT在電力半導體器件分類中的位置
IGBT是能源轉換與傳輸的核心器件,是電力電子裝置的“CPU”。IGBT是一種大功率的電力電子器件,是一個非通即斷的開關,IGBT沒有放大電壓的功能,導通時可以看作導線,斷開時當作開路。三大特點就是高壓、大電流、高速。它是電力電子領域非常理想的開關器件,不同公司的IGBT如圖3所示。
采用IGBT進行功率變換,能夠提高用電效率和質量,具有高效節能和綠色環保的特點,是解決能源短缺問題和降低碳排放的關鍵支撐技術。
IGBT的應用領域很廣,如工業領域中的變頻器,家用電器領域的變頻空調、洗衣機、冰箱,軌道交通領域的高鐵、地鐵、輕軌,軍工航天領域的飛機、艦艇以及新能源領域的新能源汽車、風力發電等都有非常廣泛的應用。
IGBT模塊在電動汽車中發揮著至關重要的作用,是電動汽車及充電樁等設備的核心技術部件。IGBT模塊占電動汽車成本將近10%,占充電樁成本約20%。IGBT主要應用于電動汽車領域中以下幾個方面:
①電動控制系統:大功率直流/交流(DC/AC)逆變后驅動汽車電機(圖4),車載空調控制系統;
②小功率直流/交流(DC/AC)逆變(圖5),使用電流較小的IGBT和FRD;
③充電樁:智能充電樁中IGBT模塊被作為開關元件使用(圖6)。
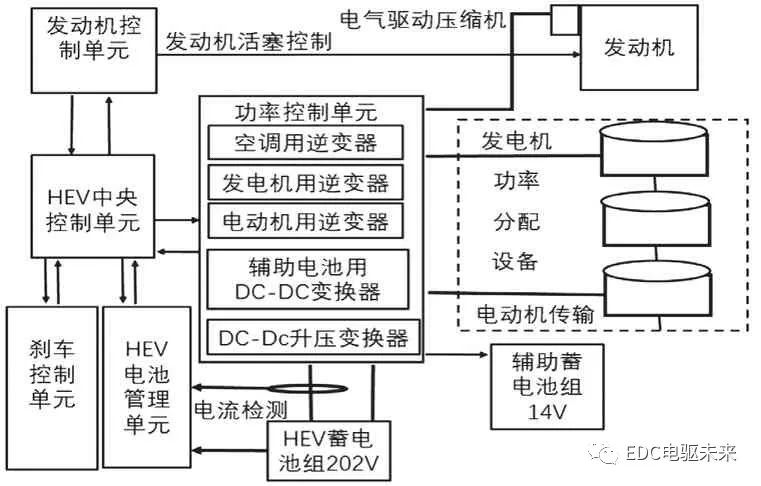
圖4 HEV中的應用
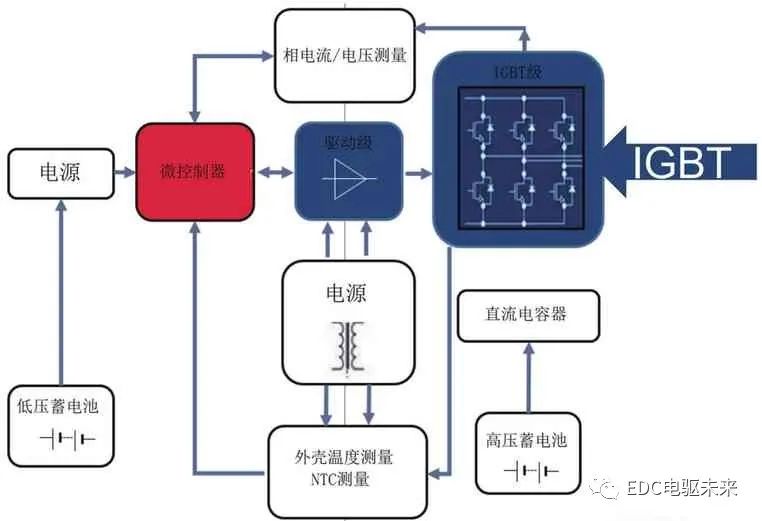
圖5 IGBT在電動汽車逆變器中的應用
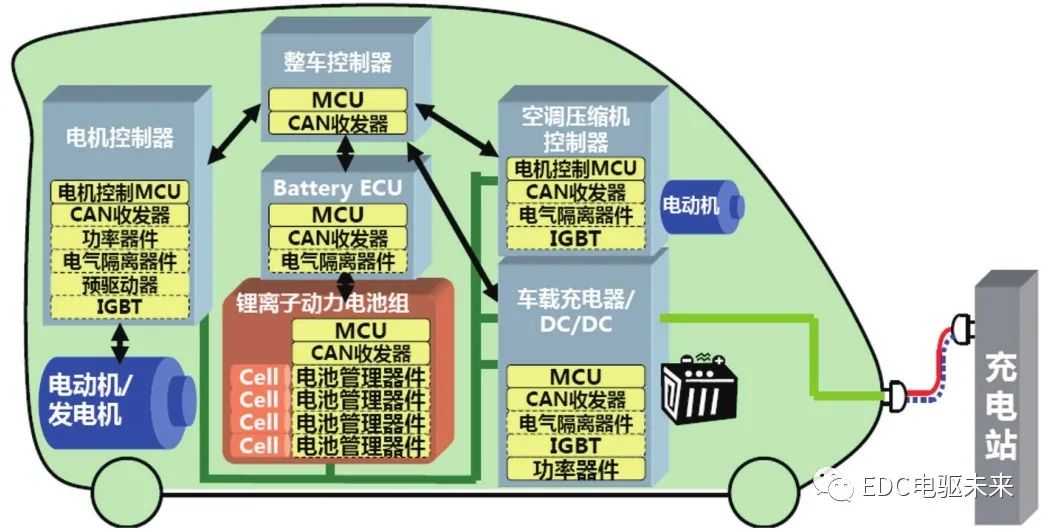
圖6 IGBT在混合動力(HEV)/純電動(EV)汽車中的相關應用
IGBT模塊按封裝工藝來看主要可分為焊接式(圖7)與壓接式(圖8)兩類。焊接式IGBT的結構及封裝過程見圖9。高壓IGBT模塊一般以標準焊接式封裝為主,中低壓IGBT模塊則出現了很多新技術,如燒結取代焊接,壓力接觸取代引線鍵合的壓接式封裝工藝。
模塊技術發展趨勢:無焊接、無引線鍵合及無襯板/基板封裝技術;內部集成溫度傳感器、電流傳感器及驅動電路等功能元件,不斷提高IGBT模塊的功率密度、集成度及智能度。
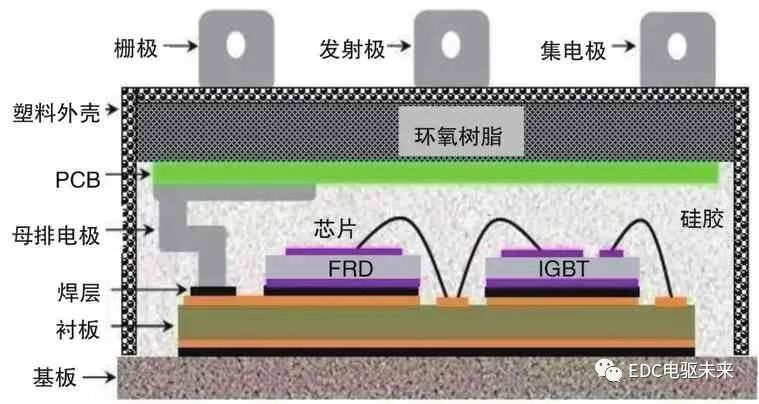
圖7 焊接式IGBT
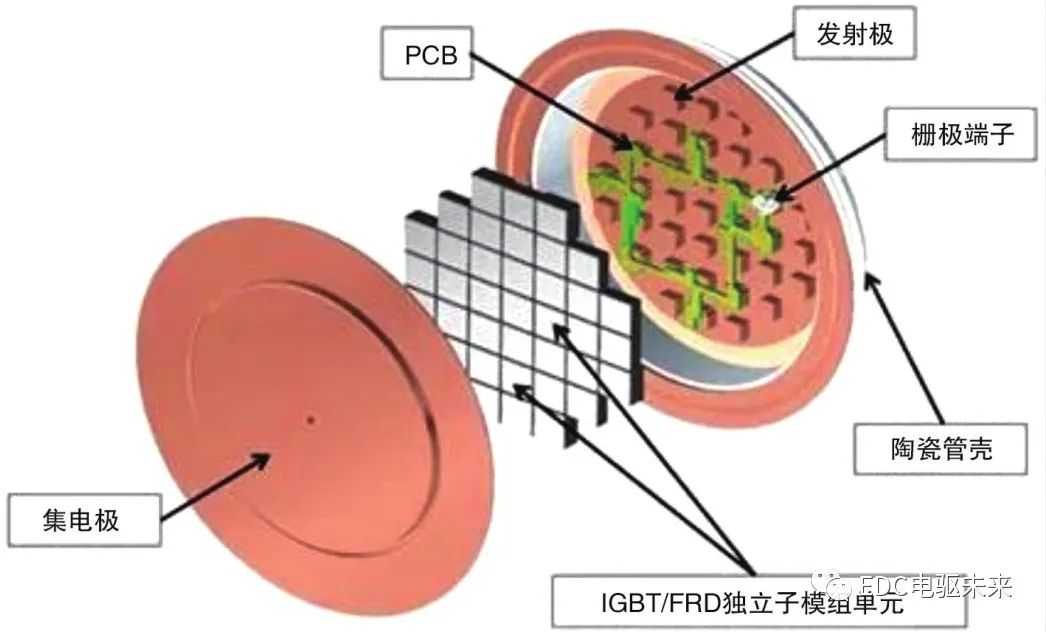
圖8 壓接式IGBT
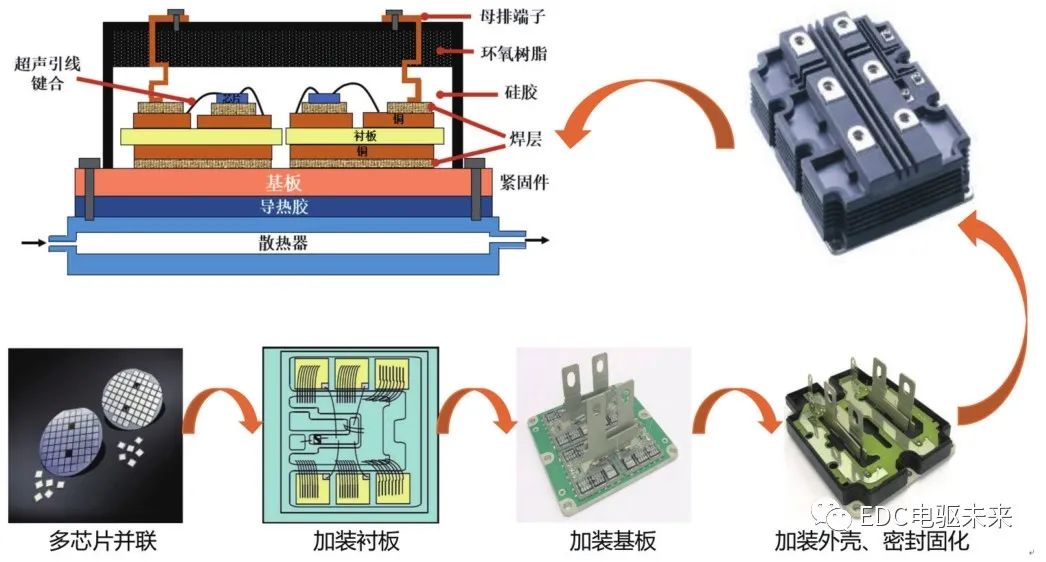
圖9 焊接式IGBT的結構及封裝過程
2.目前市場現狀
國外研發IGBT器件的公司主要有英飛凌、ABB、三菱、西門康(圖10)、東芝、富士等。中國功率半導體市場占世界市場的50%以上,但在中高端MOSFET及IGBT主流器件市場上,相對較弱。國外企業如英飛凌、ABB、三菱等廠商研發的IGBT器件產品規格涵蓋電壓600~6 500V,電流2~3 600A,已形成完善的IGBT產品系列。
二、IGBT在電動汽車直流電動機控制中的應用
1.直流電動機的控制系統
在電源電路上,直流電動機可以采用較少的控制元件,一般用斬波器來控制。最常采用的有IGBT電子功率開關的斬波器,IGBT斬波器是在直流電源與直流電動機之間的一個周期性的通斷開關裝置。斬波器根據直流電動機輸出轉矩的需要,脈沖輸出和變換直流電動機所需電壓從0到最高電壓,與直流電動機輸出的功率相匹配,來驅動和控制直流電動機運轉。IGBT斬波器已經商品化,可供用戶選用。
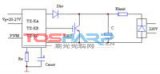
直流斬波控制方式由于體積小、重量輕、效率高、可控制性好,而且根據所選的加速度,能平穩加速到理想的速度,所以該控制方式在電力驅動領域得到了廣泛應用。如圖11所示為用于直流電動機速度控制的一象限直流斬波控制。四象限運行是指用二軸表示電動機轉速,y軸表示電流,第一象限就是電動狀態。四象限是指正向電動、正向發電、反向電動、反向發電。
一象限直流斬波控制的工作原理是電流經蓄電池正極輸出,經絕緣柵極雙極型晶體管(IGBT)的集電極C和發射極E,再經電刷進入電動機M的轉子,電動機的定子S可以是線圈也可能是永磁體。駕駛人踏下加速踏板時,實際上就是電路在控制IGBT管的門極G的PWM波占空比加大,汽車減速時,若定子S為永磁體,則電動機轉為發電機發電,但發出的電流無法經IGBT將電流充入蓄電池。要想在第二象限工作,則可在IGBT的G和E間反加一個大功率二極管,這時電動機再生制動的能量就可以返回蓄電池了。
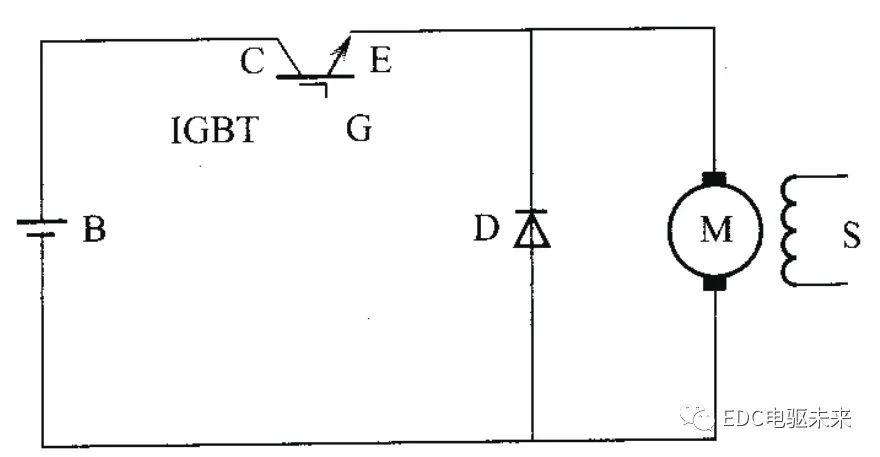
圖11 用于直流電動機速度控制的一象限直流斬波控制
2.IGBT的使用與檢測
(1)IGBT使用注意事項
由于IGBT模塊為MOSFET結構,IGBT的柵極通過一層氧化膜與發射極實現電隔離。由于此氧化膜很薄,其擊穿電壓一般僅能承受到20~30V,所以因靜電而導致柵極擊穿是IGBT失效的常見原因之一。因此,使用中要注意以下幾點。
①在使用模塊時,盡量不要用手觸摸驅動端子部分,當必須觸摸模塊端子時,要先將人體或衣服上的靜電用大電阻接地進行放電后再觸摸;在用導電材料連接模塊驅動端子時,在配線未接好之前請先不要接上模塊,在良好接地的情況下操作。在應用中有時雖然保證了柵極驅動電壓沒有超過柵極最大額定電壓,但柵極連線的寄生電感和柵極與集電極間的電容耦合,也會產生使氧化層損壞的振蕩電壓。為此,通常采用雙絞線來傳送驅動信號,以減少寄生電感。在柵極連線中串聯小電阻也可以抑制振蕩電壓。
②在柵極發射極間開路時,若在集電極與發射極間加上電壓,隨著集電極電位的變化,由于集電極有漏電流流過,柵極電位升高,集電極則有電流流過。這時,如果集電極與發射極間存在高電壓,則有可能使IGBT發熱及至損壞。
③在使用IGBT的場合,當柵極回路不正常或柵極回路損壞時(柵極處于開路狀態),若在主回路上加上電壓,則IGBT就會損壞。為防止此類故障,應在柵極與發射極之間串接一個10kΩ左右的電阻。
④在安裝或更換IGBT模塊時,應十分重視IGBT模塊與散熱片的接觸面狀態和擰緊程度。為了減少接觸熱阻,最好在散熱器與IGBT模塊間涂抹導熱硅脂,安裝時應受力均勻,避免用力過度而損壞。
⑤一般散熱片底部安裝有散熱風扇,當散熱風扇損壞,散熱片散熱不良時,將導致IGBT模塊發熱,從而發生故障。因此對散熱風扇應定期進行檢查,一般在散熱片上靠近IGBT模塊的地方安裝有溫度感應器,當溫度過高時報警或停止IGBT模塊工作。
(2)IGBT管極性測量
判斷極性,首先將萬用表撥在R×1k擋,用萬用表測量時,若某一極與其他兩極阻值為無窮大,調換表筆后該極與其他兩極的阻值仍為無窮大,則判斷此極為柵極G。其余兩極再用萬用表測量,若測得阻值為無窮大,調換表筆后測量阻值較小,則在測量阻值較小的一次中,紅表筆接的為集電極C,黑表筆接的為發射極E。
(3)檢測判斷IGBT管的好壞
IGBT管的好壞可用指針式萬用表的R×1k擋來檢測,或用數字式萬用表的“二極管”擋來測量PN結正向壓降進行判斷。檢測前先將IGBT管三個引腳短路放電,避免影響檢測的準確度;然后用指針式萬用表的兩支表筆正反測G、E兩極及G、C兩極的電阻。正常G、C兩極與G、E兩極間的正反向電阻均為無窮大;內含阻尼二極管的IGBT管正常時,E、C極間均有4kΩ的正向電阻。
最后用指針式萬用表的紅筆接C極,黑筆接E極,若所測值在3.5kΩ左右,則所測管為含阻尼二極管的IGBT管,若所測值在50kΩ左右,則所測IGBT管內不含阻尼二極管。對于數字式萬用表,正常情況下,IGBT管的C、E極間正向壓降約為0.5V。
綜上所述,內含阻尼二極管的IGBT管檢測,除紅黑表筆連接C、E阻值較大,反接阻值較小外,其他連接檢測的讀數均為無窮大。測得IGBT管三個引腳間電阻均很小,則說明該管已擊穿損壞,維修中IGBT管多為擊穿損壞。若測得IGBT管三個引腳間電阻均為無窮大,說明該管已開路損壞。
三、IGBT在永磁磁阻同步電動機控制中的應用
1.永磁磁阻同步電動機的結構
永磁磁阻同步電動機是將永久磁鐵取代他勵同步電動機的轉子勵磁繞組,將磁鐵插入轉子內部,形成同步旋轉的磁極。電動機的定子與普通同步電動機兩層六極永磁磁阻同步電動機的定子和轉子一樣,如圖12所示,轉子上不再用勵磁繞組、集電環和電刷等來為轉子輸入勵磁電流,輸入定子的是三相正弦波電流,這種電動機稱為永磁磁阻同步電動機。
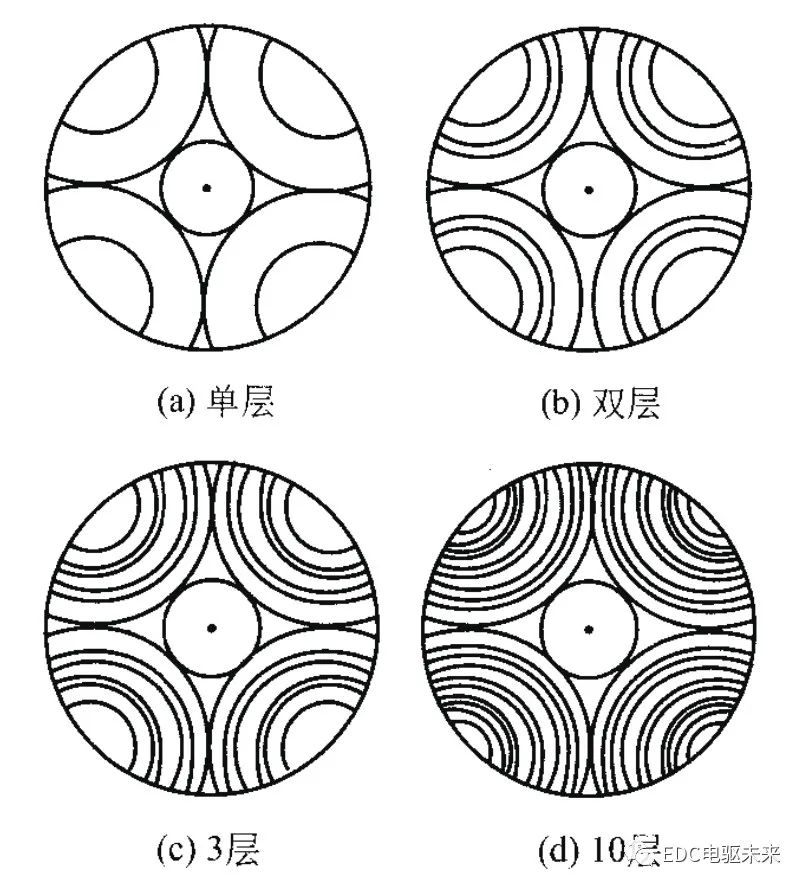
圖12 不同層數的永磁磁阻同步電動機的轉子
2.永磁磁阻同步電動機的控制系統
永磁磁阻同步電動機采用了帶有矢量變換電路的逆變器系統來控制,其控制系統由直流電源、電容器、三相絕緣柵雙極晶體管(IGBT)逆變器、永磁同步電動機(PSM)、電動機轉軸位置檢測器(PS)、速度傳感器、電流檢測器、驅動電路和其他一些元件等共同組成。微處理器控制模塊中包括乘法器、矢量變換電路、弱磁控制器、轉子位置檢測系統、速度調節系統、電流控制系統、PWM發生器等主要電子器件,PWM逆變器的作用是將直流電經過脈寬調制變為頻率及電壓可變的交流電,電壓波形有正弦波或方波。
①轉子位置檢測器根據檢測轉子磁極的位置信號和矢量變換電路發出的控制信號,共同通過電流分配信號發生器來對轉子位置信號進行調節,產生電流分配信號,將信號分別輸入A、B乘法器中。
②速度傳感器、速度變換電路和速度調節器,對電動機的運行狀態進行判別和處理,將電動機的運行狀態信號分別輸入A、B乘法器中。
③控制驅動器采用不同的控制方法,由電流分配信號發生器和速度調節器對系統提供信號,經過乘法器邏輯控制單元的計算后產生控制信號,并與電流傳感器輸入的電流信號,共同保持轉子磁鏈與定子電流之間的確定關系,將電流頻率和相位變換信號分別輸入各自獨立的電流調節器中,然后輸出到PWM發生器中,控制逆變器換流IGBT開關元件的通斷,完成脈寬調制,為永磁同步電動機提供正弦波形的三相交流電,同時控制定子繞組的供電頻率、電壓和電流的大小,使永磁同步電動機產生恒定的轉矩和對永磁同步電動機進行調速控制。永磁磁阻同步電動機的控制系統如圖13所示。
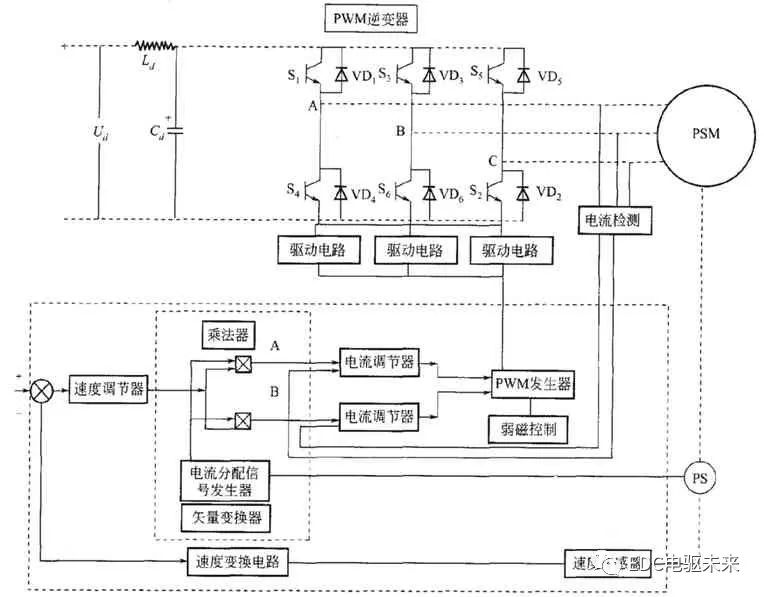
圖13 永磁磁阻同步電動機的控制系統
3.永磁磁阻同步電動機的機械特性
高永磁磁阻同步電動機在牽引控制中采用矢量控制方法,在額定轉速以下恒轉矩運轉時,使定子電流相位領先一個β角,這樣,一方面可增加電動機的轉矩,另一方面由于β角領先產生的弱薄作用,使電動機額定轉速點增高,從而增大了電動機在恒轉矩運轉時的調速范圍,如β角繼續增加,電動機將運行在恒功率狀態。永磁磁阻同步電動機能夠實現反饋制動。圖14所示為永磁磁阻同步電動機的力學特性曲線。
四、IGBT在永磁無刷直流電動機控制中的應用
1.永磁無刷直流電動機的結構
永磁無刷直流電動機可以看作是一臺用電子換向裝置取代機械換向的直流電動機,永磁無刷直流電動機主要由永磁電動機本體、轉子位置傳感器和電子換向電路組成。無論是結構或控制方式,永磁無刷直流電動機與傳統的直流電動機都有很多相似之處:用裝有永磁體的轉子取代有刷直流電動機的定子磁極;用具有多相繞組的定子取代電樞;用由固態逆變器和軸位置檢測器組成的電子換向器取代機械換向器和電刷。
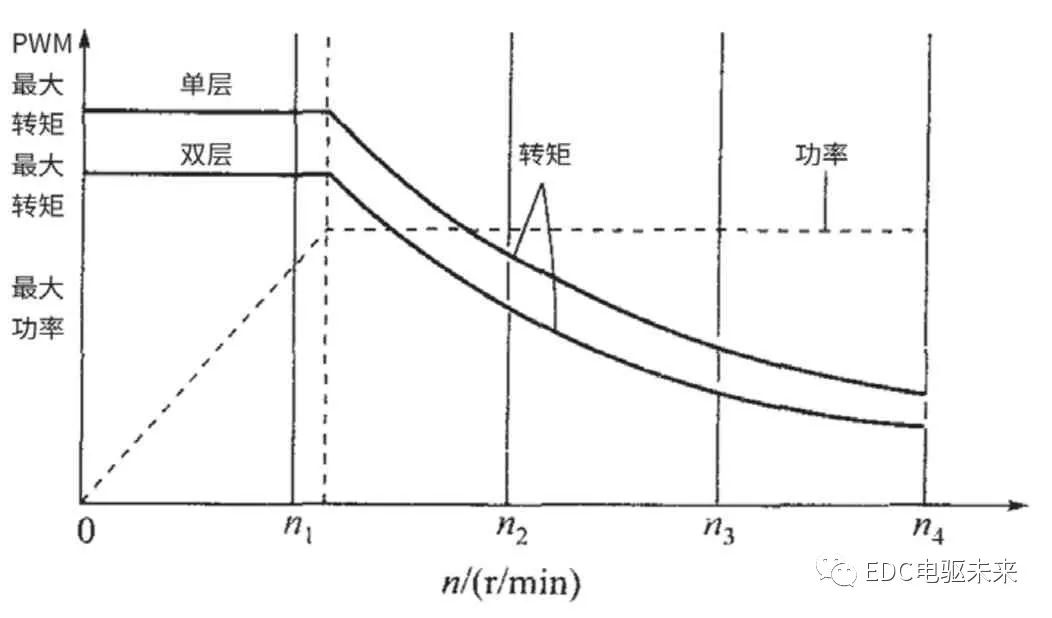
圖14 永磁磁阻同步電動機的力學特性曲線
2.永磁無刷直流電動機的控制系統
永磁無刷直流電動機的基本控制系統由直流電源、電容器、三相絕緣柵雙極晶體管逆變器、永磁無刷直流電動機(PMBDC)、電動機轉軸位置檢測器(PS)、邏輯控制單元120°導通寬脈寬調制信號(PWM)發生器驅動電路和其他一些電子器件共同組成。
轉軸位置檢測器檢測轉軸位置的信號,經過位置信號處理,將信號輸送到邏輯控制單元,碼盤檢測電動機的轉速,經過速度反饋單元和速度調節器對電動機的運行狀態進行判別,將信號輸送到邏輯控制單元,經過邏輯控制單元計算后,將控制信號傳送到PWM發生器。
電流檢測器按照閉環控制方式,將反饋電流進行綜合,經過電流調節器調控,也將電流信號輸入PWM發生器。
由轉軸位置檢測器根據轉角θ和速度調節器,對電動機的運行狀態進行判別,共同發出轉子位置的信號DA、DB、DC,以及電流檢測器對電流的調控信號,共同輸入PWM發生器后,產生脈寬調制的信號,通過自動換流來改變定子繞組的供電頻率和電流的大小,控制逆變器的功率開關元件的導通規律。如圖15所示,逆變器的功率開關由上半橋開關元件S1~S3和下半橋開關元件S4~S6組成,在同一時刻只有處于不同橋臂上的一個開關元件IGBT被導通(例如S1和S6),電動機的電磁轉矩T與開關元件導通的電流成正比。
五、IGBT在驅動變速系統中的應用
通過驅動電機工作狀態可以了解新能源汽車驅動系統的基本功能,根據駕駛員意愿驅動電機的工作狀態:掛D擋加速行駛時、減速制動時、掛R擋倒車時以及E擋行駛時來了解它的工作過程。
1.D擋加速行駛
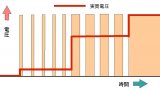
駕駛員掛D擋并踩加速踏板,此時擋位信息和加速信息通過信號線傳遞給整車控制器VCU,VCU把駕駛員的操作意圖通過CAN線傳遞給驅動電機控制器MCU,再由驅動電機控制器MCU結合旋變傳感器信息(轉子位置),進而向永磁同步電動機的定子通入三相交流電,三相電流在定子繞組的電阻上產生電壓降。由三相交流電產生的旋轉電樞磁動勢及建立的電樞磁場,一方面切割定子繞組,并在定子繞組中產生感應電動勢;另一方面以電磁力拖動轉子以同步轉速正向旋轉。隨著加速踏板行程不斷加大,電機控制器控制的6個IGBT導通頻率上升,電動機的轉矩隨著電流的增加而增加,因此,起步時基本上擁有最大的轉矩。隨著電動機轉速的增加,電動機的功率也增加,同時電壓也隨之增加。在電動汽車上,一般要求電動機的輸出功率保持恒定,即電動機的輸出功率不隨轉速增加而變化,這要求在電動機轉速增加時,電壓保持恒定。
與此同時,電機控制器也會通過電流傳感器和電壓傳感器,感知電機當前功率、消耗電流大小、電壓大小,并把這些信息數據通過CAN網絡傳送給儀表、整車控制器,其具體工作原理如圖16所示。
2.R擋倒車時
當駕駛員掛R擋時,駕駛員請求信號發給VCU,再通過CAN線發送給MCU,此時MCU結合當前轉子位置(旋變傳感器)信息,通過改變IGBT模塊改變W/V/U通電順序,進而控制電機反轉。
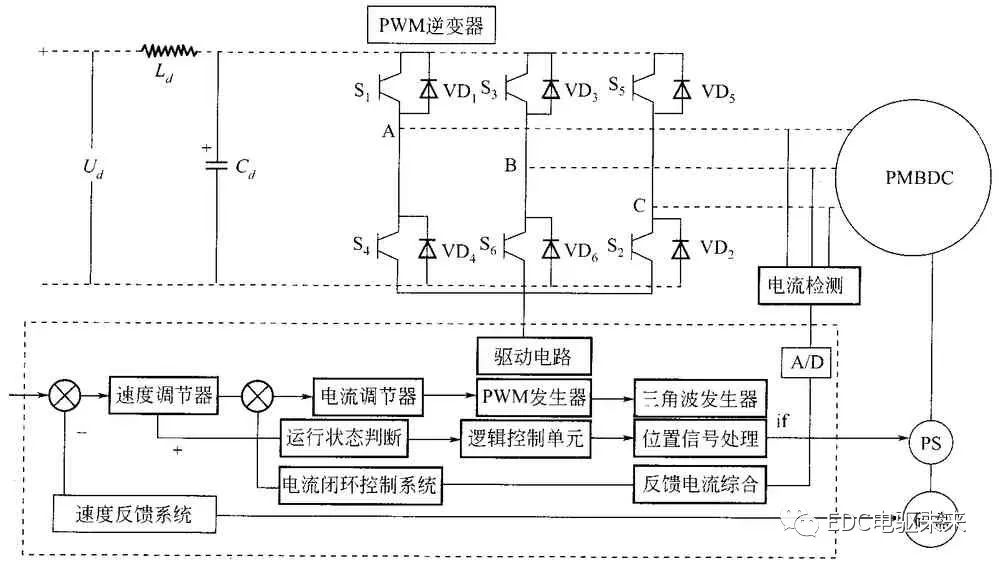
圖15 永磁無刷直流電動機控制策略
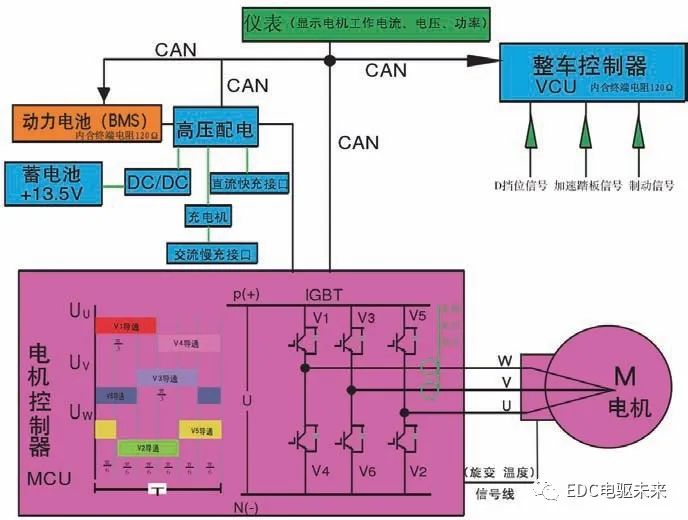
圖16 D擋工作原理
3.制動時能量回收
駕駛員松開加速踏板時,電機由于慣性仍在旋轉,設車輪轉速為V輪、電機轉速為V電機,設車輪與電機之間固定傳動比為K,當車輛減速時,V輪K<V電機時,電機仍是動力源,隨著電機轉速下降,當V輪K>V電機時,此時電機由于被車輛拖動而旋轉,此時驅動電動機變為發電機(圖17)。
BMS可以根據電池充電特性曲線(充電電流、電壓變化曲線與電池容量的關系)和采集電池溫度等參數計算出相應的允許最大充電電流。MCU根據電池允許最大充電電流,通過控制IGBT模塊,使“發電機”定子線圈旋轉磁場角速度與電機轉子角速度保持到發電電流不超過允許最大充電電流,以調整發電機向蓄電池充電的電流,同時這也控制了車輛的減速度,具體過程如圖18所示。
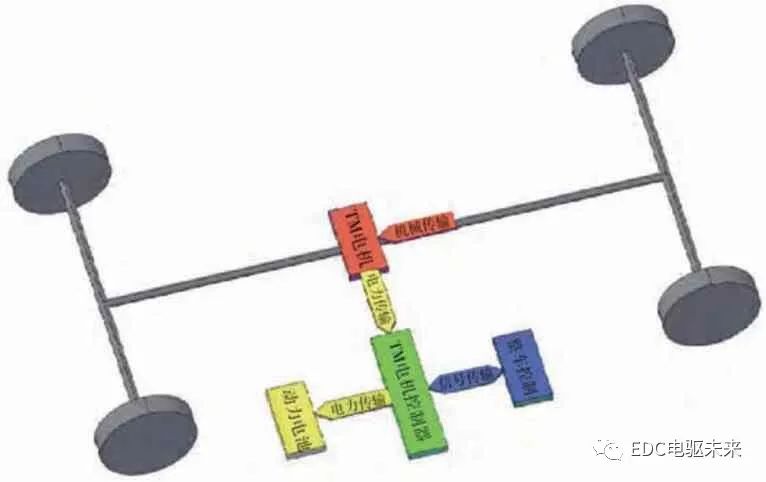
圖17 驅動電機變為發電機
當踩下制動踏板時,MCU輸出的電流頻率會急劇下降,饋能電流在MCU的調節下充入高壓電池,當IGBT全部關閉時在當前的反拖速度和模式下為最大饋能狀態,此時MCU對“發電機”沒有實施速度和電流的調整,“發電機”所發的電量全部轉移給蓄電池,由于發電機負載較大,此時車輛減速也較快。在此期間能量回收的原則是:①電池包溫度低于5℃時,能量不回收;②單體電壓在4.05~4.12V時,能量回收6.1kW,單體電壓超過4.12V時,能量不回收,低于4.05V時,能量滿反饋;③SOC大于95%、車速低于30km/h時沒有能量回收功能,且能量回收及輔助制動力大小與車速和制動踏板行程相關。
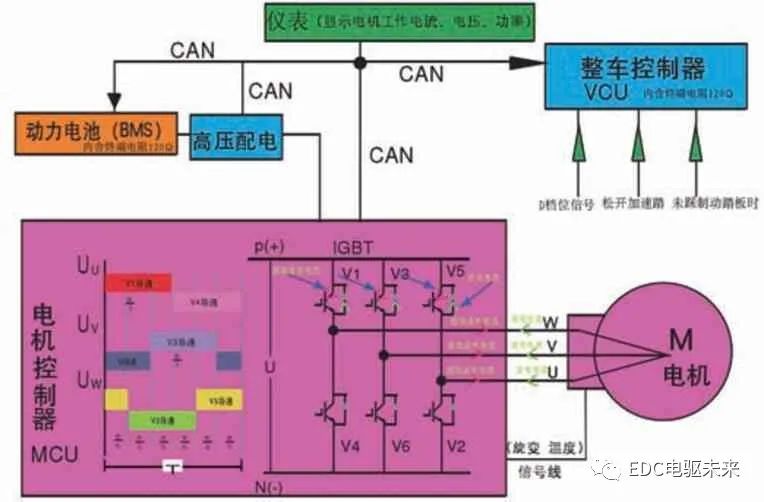
圖18 反向電流的施加
4.E擋行駛時
E擋為能量回收擋,在車輛正常行駛時E擋與D擋的根本區別在于MCU和VCU內部程序、控制策略不同。在加速行駛時E擋相對于D擋來說提速較為平緩,蓄電池放電電流也較為平緩,目的是盡可能節省電量以延長行駛距離,而D擋提速較為靈敏,響應較快。在松開加速踏板時,E擋更注重于能量回收,驅動電機被車輪反拖發電時所需的“機械能”牽制了車輛的滑行,從而也起到了一定的制動效果,所以E擋行車時車輛的滑行距離比D擋短。
審核編輯:湯梓紅














 工商網監
工商網監
評論