CAN總線設(shè)計規(guī)范對于CAN節(jié)點的差分電平位信號特征著嚴格的規(guī)定,如果節(jié)點的差分電平位信號特征不符合規(guī)范,則在現(xiàn)場組網(wǎng)后容易出現(xiàn)不正常的工作狀態(tài),各節(jié)點間出現(xiàn)通信故障
2015-10-07 19:00:09 11154
11154 
對一般的開發(fā)者來說,CAN總線的位定時概念并不常見。不過,如果給整車廠做過零部件,經(jīng)受過他們的CAN通信測試考驗,您可能就知道,這也是比較重要的一個知識點。
2022-08-26 17:15:193239 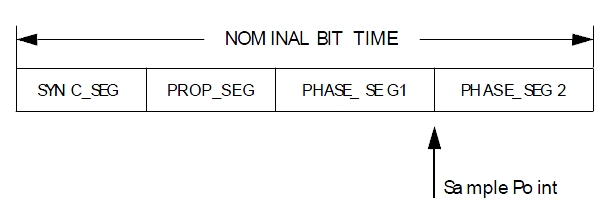
應(yīng)用指南—如何使用DSLogic分析CAN/CAN-FD 信號?
2023-09-04 14:15:561121 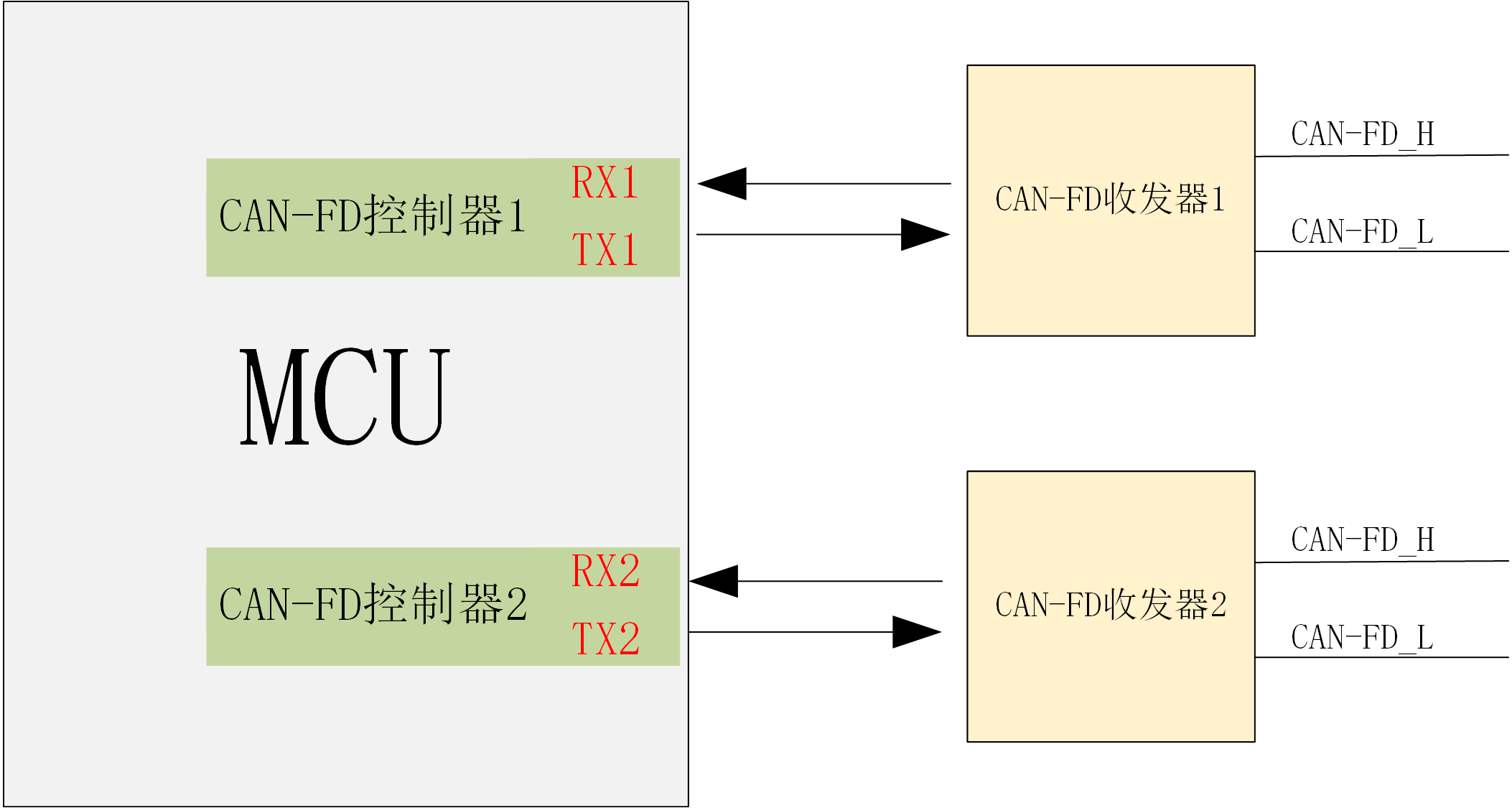
端口和多種外設(shè)。-1個12位的ADC和2個比較器-1個16位通用定時器、1個32位通用定時器、3個16位基本定時器、1個16位高級定時器-1個I2C接口、1個SPI接口和2個UART接口-1個USB接口-1個CAN接口-工作電壓為2.0V-5.5V-工作溫度范圍(環(huán)境溫度)-40℃-85℃工業(yè)型和-4
2022-01-26 07:53:41
;TACCR0=0x2000;//注意10進制化16進制T=1/F定時器A中的控制寄存器中有一位TAIE中斷允許位這樣寫程序為什么不能進入定時器中斷?謝謝大神的指教。
2017-01-17 15:55:23
為了調(diào)整負載功率和抑制信號反射;然而,阻抗不匹配的現(xiàn)象在CAN總線網(wǎng)絡(luò)中隨處可見;如圖1所示,阻抗不匹配的將造成7個現(xiàn)象,其中最受關(guān)注的為上升沿和下降沿的臺階;下文將針對邊沿臺階的現(xiàn)象做詳細介紹。 圖1阻抗
2019-10-24 07:00:00
什么是CAN總線信號傳輸?shù)?b class="flag-6" style="color: red">位定時?什么是CAN總線信號傳輸?shù)?b class="flag-6" style="color: red">位同步?
2021-05-18 06:52:14
大家好!如果想用CAN或串口25ms的間隔往外發(fā)送一條信息,該怎么做呢?我嘗試把發(fā)送語句放到定時器的回調(diào)函數(shù)中,程序可以編譯,但是運行時會報錯,原因大概是CAN或串口的發(fā)送函數(shù)中有延時等待的語句
2023-02-10 14:38:10
CAN總線通訊協(xié)議的每一幀可以看作一連串的電平信號,每一個電平信號代表一位(一個字節(jié)8位的位),所以一幀中包含了很多個位,由發(fā)送單元在非同步的情況下發(fā)送的每秒鐘的位數(shù)稱為位速率。一位又分為4段,同步段(SS)、傳播時間段(PTS)、相位緩沖段 1(PBS1)、相位緩沖段 2(PB...
2021-08-20 07:43:39
摘要:在CAN總線中,位定時有一點小錯誤就會導致總線性能嚴重下降。雖然在許多情況下,位同步會修補由于位定時設(shè)置不當而產(chǎn)生的錯誤,但不能完全避免出錯情況,并且在遇到兩個或多個CAN節(jié)點同時發(fā)送的情況
2012-10-11 17:19:06
CAN協(xié)議與其它現(xiàn)場總線協(xié)議的區(qū)別中有一個是:它使用同步數(shù)據(jù)傳輸而不是異步傳輸(面向字符)。這意味著傳輸性能得到更有效的發(fā)揮,但是另一方面,這需要更加復雜的位同步方法。 在面向字符的協(xié)議中的位同步
2016-08-15 15:59:45
為了調(diào)整負載功率和抑制信號反射;然而,阻抗不匹配的現(xiàn)象在CAN總線網(wǎng)絡(luò)中隨處可見;如圖1所示,阻抗不匹配的將造成7個現(xiàn)象,其中最受關(guān)注的為上升沿和下降沿的臺階;下文將針對邊沿臺階的現(xiàn)象做詳細介紹。圖1阻抗不
2019-10-07 07:00:00
和SJA1000之間狀態(tài)、控制和命令信號的交換都是在控制段中完成的。4.SJA1000檢測到有復位請求,中止當前報文收、發(fā)工作,進入到復位模式,當復位請求位出現(xiàn)1到0的變化,CAN控制器將返回到操作模式
2022-01-11 06:50:05
的要求越來越多,而這些功能的實現(xiàn)大多是基于電子操作的,這就使得電子裝置之間的通訊越來越復雜,同時意味著需要更多的連接信號線。提出CAN總線的最初動機就是為了解決現(xiàn)代汽車中龐大的電子控制裝置之間的通訊,減少
2017-10-19 11:12:46
示意圖,其中位時間為1000ns。如圖所示,CAN總線中每一位數(shù)據(jù)由四部分構(gòu)成:同步段、傳播段、相位緩沖段1、相位緩沖段2。同步段:用于總線各個節(jié)點之間的同步。傳播段:用于補償信號的物理傳播延時。相位緩沖
2021-05-13 06:00:00
什么是CAN BUS中的仲裁字段。它是否用于識別CAN總線上的每個節(jié)點? CAN總線有兩個信號,CAN高(CANH)和CAN低(CANL)。 在圖中,CAN使用11位標識符,總共為211,即2048
2020-10-02 23:00:00
各位專家,您好。我打算在DSP2812開發(fā)板和上位機之間實現(xiàn)CAN通信:設(shè)置2個發(fā)送郵箱,1個接收郵箱,定時接收和發(fā)送數(shù)據(jù)幀.2個發(fā)送郵箱發(fā)送周期分別是10ms和200ms;接收郵箱的接收周期是160ms.想在主程序中循環(huán)接收和發(fā)送,不清楚程序中應(yīng)該如何實現(xiàn),請各位專家指教.謝謝.
2020-06-11 15:08:56
can的每一位都會有個位時序,如下圖(網(wǎng)上截取)實際抓出來的H L之間的波形就類似串口一樣,整個位都是全高或者全低電平。我實際收據(jù)can數(shù)據(jù)時,采樣點確實也要設(shè)置到圖上標注才可以正確接收。例如,設(shè)置
2022-10-25 15:02:10
將can總線上的信號轉(zhuǎn)換成wifi信號,利用手機或者電腦來接受信號和發(fā)送信號,那位大俠幫忙一下?(軟件和硬件都需要)以及具體的wifi數(shù)據(jù)包格式?
2015-11-28 08:49:56
一、定時器簡介STM32F1 系列中,除了互聯(lián)型的產(chǎn)品,共有 8 個定時器,分為基本定時器,通用定時器和高級定時器。基本定時器 TIM6 和 TIM7 是一個 16 位的只能向上計數(shù)的定時器,只能
2021-08-12 06:05:24
我的設(shè)計必須使用virtex 6 FPGA在8ns時鐘周期運行,我估計7ns和8ns的時鐘周期約束是帶有定時誤差的結(jié)果時鐘。由于時間錯誤或時序錯誤僅僅表示未達到7ns約束的路徑,此報告的時段是錯誤
2019-02-22 07:22:43
CAN通訊設(shè)計DSP/MCU的CAN接口是指芯片外設(shè)中的CAN總線控制器,其輸出電平為TTL規(guī)格,如果直接將兩塊芯片的CANRX、CANTX引腳連接,無法實現(xiàn)CAN通訊。SAJ1000
2021-08-20 08:07:21
HAL庫下使用CAN數(shù)據(jù)格式:Cube中的設(shè)置:修改代碼CAN總線使用差分信號,在保證信號穩(wěn)定的情況下可以在控制總線上掛載多個對象,實現(xiàn)與多個器件的通信。同時CAN有多級接收FIFO作為緩存器,提高
2021-08-23 08:12:48
你好,我用的是PIC24FJ128GA310。我正在嘗試使用32位定時器(Time2和3)來進行大延遲/計數(shù)。下面是我的32位定時器的配置代碼。當我使用這個計時器作為延遲的目的時,它工作得很好,但是
2020-04-23 06:38:02
定時器的框圖中有一個TRGO信號輸出,此信號可以用來觸發(fā)ADC、DAC、其他定時器等。此信號怎么產(chǎn)生呢? 要使用TIM_SelectOutputTrigger(TIM1
2021-08-19 07:42:38
: 睡眠模式請求軟件對該位置1可以請求CAN進入睡眠模式,一旦當前的CAN活動(發(fā)送或接收報文)結(jié)束,CAN就進入睡眠。軟件對該位清0使CAN退出睡眠模式。當設(shè)置了AWUM位且在CAN Rx信號中檢測
2018-03-20 13:50:04
MCU是野火的STM32H743挑戰(zhàn)者,例程基于野火的《CAN雙機通信》;位時序分解STM32 的 CAN 外設(shè)位時序中只包含 3 段,分別是同步段 SYNC_SEG、位段 BS1 及位段 BS2
2021-08-11 09:10:55
如題,最近在做CAN相關(guān)的項目,但是偶發(fā)出現(xiàn)CAN錯誤狀態(tài)寄存器 (CAN_ESR) 中LEC[2:0]為100: 隱性位錯,想問下熟悉的朋友,這個是哪方面的問題,硬件上波形質(zhì)量挺好
2024-03-18 06:08:00
如題,最近在做CAN相關(guān)的項目,但是偶發(fā)出現(xiàn)CAN錯誤狀態(tài)寄存器 (CAN_ESR) 中LEC[2:0]為100: 隱性位錯,想問下熟悉的朋友,這個是哪方面的問題,硬件上波形質(zhì)量挺好
2023-08-07 06:08:10
發(fā)送時,發(fā)送高優(yōu)先級ID消息的單元可獲得發(fā)送權(quán); 2、消息的發(fā)送 在can協(xié)議中,所有消息都是以固定格式發(fā)送。總線空閑時,所有與總線相連的單元都可以開始發(fā)送新消息。兩個以上的單元同時開始
2015-01-22 16:12:04
`本設(shè)計所做的工作 ①完成對液位信號的采集;②實現(xiàn)對一個液位控制的單回路PID控制算法或串級PID算法,并通過數(shù)據(jù)采集卡輸出控制信號。③態(tài)顯示采集信號并保存一定時段的液位采集數(shù)據(jù)和控制信號。[hide] [/hide]`
2011-12-31 10:39:26
決定。重新同步可通過應(yīng)用“位填充”的方法實現(xiàn)。這種方法是在一定數(shù)量的恒定位電平之后將一個反碼插入到位流中。 圖1NRZ和曼徹斯特編碼的位表示 CAN協(xié)議中應(yīng)用的是帶位填充(填充寬度為5位)的NRZ信號
2016-07-21 16:49:03
列文章旨在幫助您應(yīng)對這種流行的接口標準的挑戰(zhàn)。該系列的第一部分著重于CAN系統(tǒng)中的信號端接。CAN總線信號嚴重依賴于適當?shù)亩私蛹夹g(shù),以將信號傳播到網(wǎng)絡(luò)中的所有CAN節(jié)點。如果沒有正確的端接,則諸如CAN
2020-10-01 13:30:00
關(guān)于CAN總線位定時和同步機制的簡要分析
2021-05-28 06:05:24
想問一下,怎么樣實現(xiàn)一次定時多個時段,具體是輸入一個,保存,然后輸入下一個。顯示從第一個開始,結(jié)束一個顯示下一個定時。{:16:}
2013-04-30 22:44:17
利用AT89C2051+數(shù)碼管設(shè)計的15,30,45,60分鐘,四時段定時器ASM程序通過ISIS7.8仿真,顯示不正常,設(shè)置按鈕不起作用。請高手指錯!謝謝
2013-01-13 15:04:24
基于32位ARM7的CAN節(jié)點設(shè)計
2013-03-31 10:48:13
AD中如何畫不規(guī)格的封裝
2019-09-09 05:35:28
總結(jié)1.背景學汽車電子的同學可能都無法逃過CAN總線這道坎,我個人認為入門CAN總線是學習汽車電子的第一課。如何根據(jù)信號對CAN信號進行打包和如何根據(jù)CAN協(xié)議對數(shù)據(jù)進行解包,是在實踐中必須解決的問...
2021-08-18 06:56:32
我們面臨著總線上 CAN 信號的問題。
flex can0中已知有60個CAN ID,所以我們使用了60個郵箱ID。
這 60 個郵箱中斷信號可以通過 CAN0 回調(diào)正常檢測到。如果我們嘗試發(fā)送一些
2023-05-09 13:52:33
在本文中,我們用定時器0來產(chǎn)生方波信號,包含兩個實驗,實驗1產(chǎn)生一個頻率為10kHz的方波信號,實驗2產(chǎn)生一個頻率為100Hz的方波信號。實驗1 實驗1 中定時器0的初始化代碼如下所示。void
2021-11-10 06:13:24
在LabView中如何用研華的CAN卡讀取DBC文件中的信號用于控制CAN卡收發(fā)?
2013-08-10 23:12:45
但我們無法在代碼中配置 RTR 位,能否請你解釋一下如何配置 RTR 位以在生成的 CAN_NODE_0 中接收遠程幀。
2024-01-19 06:38:58
– 7位幀結(jié)束標志位,全部為隱性位。如果這7位出現(xiàn)顯性位,則會引起填充錯誤。· IFS – 7位幀間隔標志位,CAN控制器將接收到的幀正確的放入消息緩沖區(qū)是需要一定時間的,幀間隔可以提供這個時間
2021-03-23 08:30:00
器及一個內(nèi)部定時器、71個通用I/O口、8個外部中斷源、實時時鐘、8通道10位ADC等。 2.2 CAN總線控制器 CAN總線控制器選用Philips公司的SJAl000。 SJAl000是一款獨立
2020-07-08 15:34:41
問題:是否有可能將程序中的完整CAN郵箱的標識符更改為實際上有8多個完整的CAN郵箱?答:是的,可以在程序中動態(tài)地改變完整的CAN郵箱的標識符。可以通過寫入CAN TX MSG標識符寄存器來改變
2019-06-18 14:06:56
CAN0BTR0_SJW = 0;//設(shè)置同步CAN0BTR0_BRP = 7;//設(shè)置波特率 #if(CAN_BOUND_RATE == 500) CAN0BTR1 = 0x14; //設(shè)置時段1和時段2
2017-01-14 16:59:38
在周期模式中,當每次24位向上計數(shù)器數(shù)值與定時器比較寄存器(TCMPR)值相同時,此時定時器中斷事件旗標(TIF)將被硬件設(shè)置并發(fā)出中斷信號,而24位向上計數(shù)器重置為零重新向上計數(shù)。
2023-06-27 07:19:08
預備問題:比特率與波特率區(qū)別我查閱了相關(guān)資料,知道比特率指每秒發(fā)送多少二進制位,波特率指每秒發(fā)送多少碼元,請問這個碼元指的是什么?請結(jié)合can數(shù)據(jù)報文解釋一下。位時間的問題:位時間是位速率的倒數(shù)
2018-08-06 19:51:31
請教有緣人,本人現(xiàn)在在用基于28335平臺的can通訊項目,在initcana中配置了0至15郵箱為發(fā)送郵箱 16至31為接受郵箱,但實際應(yīng)用只用了16 17 18 19郵箱作為接受郵箱.0 1 2
2018-12-18 18:40:45
所有DAC之間的共性就是技術(shù)規(guī)格的定義以及說明。這篇文章將會論述靜態(tài)DAC技術(shù)規(guī)格。靜態(tài)DAC技術(shù)規(guī)格包括對DAC在DC域中所具有的特性的描述。在DC域中時,DAC的數(shù)字與模擬定時現(xiàn)象不屬于這一組技術(shù)規(guī)格。
2019-08-21 08:13:36
本資料是面向CAN 總線初學者的CAN 入門書。對CAN 是什么、CAN 的特征、標準規(guī)格下的位置分布等、CAN 的概要及CAN 的協(xié)議進行了說明。2. 使用注意事項本資料對博世(BOSCH)
2008-07-19 21:17:06 2133
2133 CAN 通信中, 波特率、位周期內(nèi)取樣點數(shù)和位置可以編程設(shè)置, 這些設(shè)置為用戶根據(jù)其應(yīng)用優(yōu)化網(wǎng)絡(luò)通信性能提供了方便。優(yōu)化位定時參數(shù),能夠保證信息同步,保證傳輸延遲和時
2009-05-15 15:08:406 位定時參數(shù)對CAN 總線網(wǎng)絡(luò)性能有著顯著影響,如果位定時有一點小錯誤都會導致總線性能嚴重下降。針對這一問題,本文通過對CAN 總線位定時控制方法的分析,提出了一種有效
2010-01-25 15:06:159 CAN通信波特率設(shè)置
LM3S2000、LM3S5000、LM3S8000系列CPU內(nèi)部有1~3路CAN控制器,通過對CAN位定時寄存器CANBIT及CAN波特率預分頻擴展寄存器CANBRPE的設(shè)置可以得到需要的CAN
2010-04-06 18:00:3924 發(fā)送定時信號產(chǎn)生電路
2009-10-11 10:37:20746 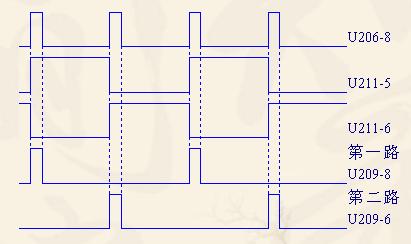
接收定時信號產(chǎn)生電路
從圖中可知
2009-10-11 10:38:11485 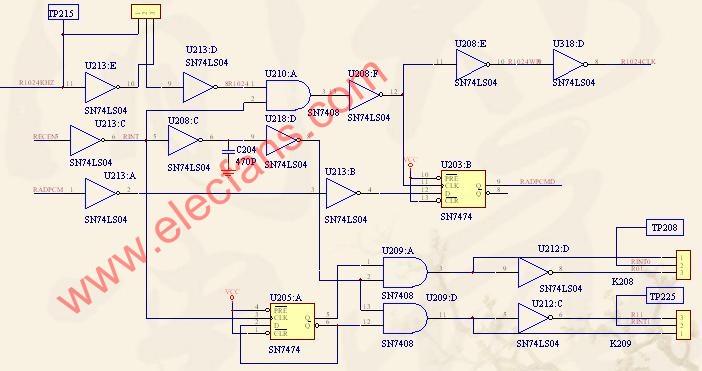
本資料是面向 CAN 總線初學者的 CAN 入門書。對 CAN 是什么、CAN 的特征、標準規(guī)格下的位置分布等、 CAN 的概要及 CAN 的協(xié)議進行了說明。
2015-12-17 17:18:080 采用簡單電路提供可調(diào)CAN電平差分輸出信號
2016-01-07 14:36:450 CAN協(xié)議與其它現(xiàn)場總線協(xié)議的區(qū)別中有一個是:它使用同步數(shù)據(jù)傳輸而不是異步傳輸(面向字符)。這意味著傳輸性能得到更有效的發(fā)揮,但是另一方面,這需要更加復雜的位同步方法。
2016-08-16 16:56:392063 基于LPC11Cx系列CAN總線位定時參數(shù)計算方法校正
2017-09-26 09:28:556 APT-9S可程式定時器功能特性: 1、一周七天可程式循環(huán)控制,可作一周內(nèi)不同時段設(shè)定及預約定時。 2、可設(shè)定80組時間定時動作 3、具有星期獨立設(shè)定功能可任意組合 4、使用EEPROM儲存設(shè)定值
2017-10-24 11:38:072 定時開關(guān)從功能上分為機械式定時開關(guān)和電子式定時開關(guān),機械式定時開關(guān)一般是由旋鈕、接觸簧片、彈簧、接觸輪、轉(zhuǎn)軸、油盒、阻力板組成,采用鐘表原理進行定時通斷。而電子式定時開關(guān)是一個以單片微處理器為核心配合電子電路等組成一個電源開關(guān)控制裝置,能以天或星期循環(huán)且多時段的控制家電的開閉。
2017-11-10 09:09:3012633 
了解時鐘信號的數(shù)字定時以及諸如抖動、漂移、上升時間、下降時間、穩(wěn)定時間、遲滯和眼圖等常用術(shù)語。本教程是儀器基礎(chǔ)教程系列的一部分。發(fā)送數(shù)字信號其實發(fā)送的就是一串由0或1組成的數(shù)字序列。 然而,與不同設(shè)備進行通信時,定時信息要與發(fā)送的位相關(guān)聯(lián)。
2017-11-17 08:36:0216705 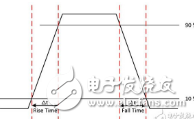
制定科學合理的網(wǎng)架重構(gòu)恢復方案對加快系統(tǒng)恢復進程、減小停電損失具有重要作用。針對當前分時段恢復方案優(yōu)化策略無法實現(xiàn)時段間協(xié)調(diào)優(yōu)化的不足,提出一種網(wǎng)架重構(gòu)分時段恢復方案全局優(yōu)化方法。首先,鑒于特級負荷
2018-02-12 15:08:100 本文首先介紹了can總線的概念與特點,其次介紹了CAN總線原理與CAN總線的應(yīng)用,最后分析了can總線是數(shù)字信號還是模擬信號以及闡述了模擬信號和數(shù)字信號之間的區(qū)別。
2018-04-25 09:15:5776258 
用來實現(xiàn)CAN總線協(xié)議。本文主要對CAN總線通信報文驗收濾波、位定時與同步做了詳細介紹,具體的跟隨小編一起來了解一下。
2018-05-07 16:16:129726 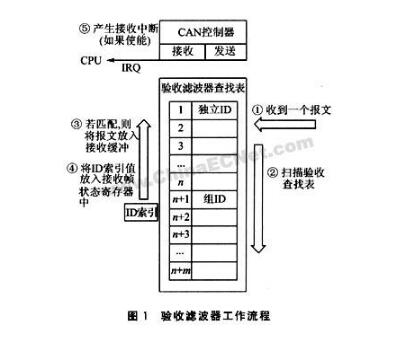
CAN總線是新能源汽車中非常重要的通訊總線,工程師們常常通過CAN總線來讀取車上的車速、轉(zhuǎn)速、扭矩等信號,但你是否知道CAN總線也可以用來讀取功率分析儀實際測試的功率信號呢?本文來詳細分析。
2018-11-02 11:16:5922551 汽車CAN總線關(guān)閉故障發(fā)生時,應(yīng)分析物理層包括CAN線路、CAN控制器及收發(fā)器、CAN信號干擾等外在因素,同時分析CAN寄存器及軟件處理,重新初始化CAN驅(qū)動和恢復正常后,定時嘗試往外發(fā)送
2018-11-27 17:00:4938325 CAN總線設(shè)計規(guī)范對于CAN節(jié)點的信號邊沿各項參數(shù)都有著嚴格的規(guī)定,如果不符合規(guī)范,則在現(xiàn)場組網(wǎng)后容易出現(xiàn)不正常的工作狀態(tài),各節(jié)點間出現(xiàn)通信故障。具體要求如表 1所示,為測試標準“GMW3122信號邊沿標準”。
2019-05-17 15:18:10987 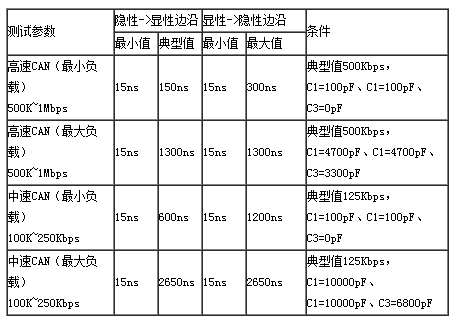
許多模擬電路需要一種時鐘信號,或者要求能在一定時間后執(zhí)行某項任務(wù)。對于這樣的應(yīng)用,有各種各樣適用的解決方案。
2019-06-29 10:33:573131 
NUC130 / 230系列特色為寬電壓工作范圍2.5V至5.5V,工作溫度:-40℃至85℃,內(nèi)建22.1184MHz高精度晶振(1%準確度)。備有豐富的外設(shè),如符合Bosch規(guī)格CAN
2020-02-24 09:01:281045 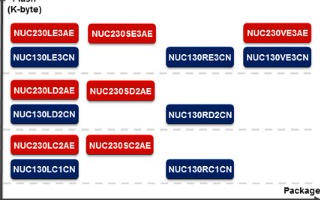
由于CAN協(xié)議使用非破壞性的位總線仲裁和顯性應(yīng)答位,信號從發(fā)送器傳輸?shù)浇邮掌髟俜祷氐浇邮掌鞅仨氃谝粋€位時間內(nèi)完成。
2020-03-21 11:23:392224 如何解析定時器產(chǎn)生的脈沖信號?
2021-04-06 17:20:1913 檢驗CAN總線信號方法說明。
2021-04-19 17:32:4614 ADSP-21992:帶CAN數(shù)據(jù)表的混合信號數(shù)字信號處理器
2021-05-27 21:08:237 CAN系統(tǒng)中信號終端電阻常見問題及解決方法
2021-05-28 10:20:2719 CAN通訊設(shè)計DSP/MCU的CAN接口是指芯片外設(shè)中的CAN總線控制器,其輸出電平為TTL規(guī)格,如果直接將兩塊芯片的CANRX、CANTX引腳連接,無法實現(xiàn)CAN通訊。SAJ1000
2021-12-05 17:36:0837 本資料是面向CAN總線初學者的CAN入門書。對CAN是什么、CAN的特征、標準規(guī)格下的位置分布等、CAN的概要及CAN的協(xié)議進行了說明。
2022-04-02 16:35:3223 廣告招牌定時器:可自動控制廣告招牌開啟和關(guān)閉的時間,可以以天、星期進行循環(huán)定時,可以設(shè)置多個時段的自動開,關(guān),一次設(shè)定長期有效。
2022-04-16 17:53:365323 本資料是面向 CAN 總線初學者的 CAN 入門書。對 CAN 是什么、CAN 的特征、標準規(guī)格下的位置分布等、
CAN 的概要及 CAN 的協(xié)議進行了說明。
2022-09-01 15:40:305 本資料是面向 CAN 總線初學者的 CAN 入門書。對 CAN 是什么、CAN 的特征、標準規(guī)格下的位置分布等、CAN 的概要及 CAN 的協(xié)議進行了說明。
2022-09-28 11:34:3613 本資料是面向 CAN 總線初學者的 CAN 入門書。對 CAN 是什么、CAN 的特征、標準規(guī)格下的位置分布等、
CAN 的概要及 CAN 的協(xié)議進行了說明。
2023-02-03 14:59:502 can總線干擾信號如何消除?? CAN總線是一種廣泛應(yīng)用于自動化系統(tǒng)通信的高效數(shù)據(jù)傳輸方式,其基于差分信號傳輸原理,可以實現(xiàn)高速、實時數(shù)據(jù)傳輸。然而,由于各種原因,CAN總線的信號通常會受到干擾
2023-09-14 16:48:032378 怎么用示波器看can總線信號?? CAN總線是一種高速、可靠的控制器局域網(wǎng)絡(luò),常被用于汽車、航空等領(lǐng)域。在調(diào)試和故障排查時,我們可以使用示波器來監(jiān)測CAN總線的信號。以下是如何使用示波器來看CAN
2023-10-11 17:19:303260 電子發(fā)燒友網(wǎng)站提供《基于ARM和CAN總線的電氣信號采集節(jié)點的設(shè)計.pdf》資料免費下載
2023-10-13 11:31:031 本資料是面向CAN總線初學者的CAN入門書。對CAN是什么、CAN的特征、標準規(guī)格下的位置分布等、CAN的概要及CAN的協(xié)議進行了說明。
2023-10-16 15:29:113 汽車CAN總線關(guān)閉故障發(fā)生時,應(yīng)分析物理層包括CAN線路、CAN控制器及收發(fā)器、CAN信號干擾等外在因素,同時分析CAN寄存器及軟件處理,重新初始化CAN驅(qū)動和恢復正常后,定時嘗試往外發(fā)送報文。
2023-10-16 15:36:13702 
定時器的定時啟動信號特點? 定時器是一種常用的計時器,可以在指定的時間后發(fā)出信號。它們在各種電器、儀器和控制系統(tǒng)中被廣泛應(yīng)用。 定時器的定時啟動信號是定時器開始計時的信號。這個信號可以
2023-10-24 11:49:21326 c51中定時器工作時如何使用T0腳輸入脈沖信號? 嵌入式系統(tǒng)中,定時器是一種常用的設(shè)備,可以實現(xiàn)各種時間控制功能,如計時、計數(shù)、產(chǎn)生中斷等。8051單片機中有兩個定時器:T0和T1,其中T0定時
2023-10-25 11:50:48436 示波器是如何測試CAN信號的? 示波器是一種用于檢測和分析電子信號的儀器,可實時顯示信號的波形,并幫助用戶診斷和解決電路故障。在汽車行業(yè)中,CAN(控制器局域網(wǎng)絡(luò))是一種常用的通信協(xié)議,用于在車
2023-12-07 13:37:491074 一文檔介紹本文將一步步介紹如何使用DSLogic邏輯分析儀采集并分析CAN/CAN-FD信號,因為CAN信號的測量和CAN-FD的大致一樣,所以下文以CAN-FD舉例,在有區(qū)別之處,將會做特別
2024-01-08 14:54:05177 
 電子發(fā)燒友App
電子發(fā)燒友App













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論