 電子發(fā)燒友App
電子發(fā)燒友App


引言
傳統(tǒng)的航空攝影測量,受空域申請、航攝周期等影響,在快速響應(yīng)和小區(qū)域的精準測繪中無法滿足快速更新的需求,低空無人機航測具有機動靈活、高效快速、作業(yè)成本低、生產(chǎn)周期短等優(yōu)點,迅速成為了傳統(tǒng)航測的有力補充。本文進行了基于無人機航測數(shù)據(jù)的1∶2000DLG數(shù)據(jù)快速生產(chǎn)實踐,并對成果數(shù)據(jù)進行了精度檢驗,最后對實踐中存在的問題提出了自己的思考。本文為偏遠的茂密森林區(qū)快速獲取測圖數(shù)據(jù)提供了方法,也能夠為無人機航測在其他領(lǐng)域的應(yīng)用提供參考。
無人機航測外業(yè)和內(nèi)業(yè)數(shù)據(jù)處理流程
1.1 無人機航測外業(yè)
(1)基本流程
無人機航測外業(yè)流程為:收集測區(qū)資料,對測區(qū)所處地理位置、地形地貌等進行評估,考慮周圍是否有機場、軍區(qū)等,是否需要報備和空域申請等;然后根據(jù)成果要求(如成果比例尺、地面分辨率大小等)和已有無人機航測設(shè)備,確定是否可以飛行;確定可以飛行后,在地面站軟件進行航線規(guī)劃,設(shè)置飛行高度、重疊度、起降場等,形成飛行計劃,必要時可進行現(xiàn)場踏勘;進行像控點布設(shè)、采集,根據(jù)測區(qū)地形地貌,也可在飛行任務(wù)完成后進行像控點采集;將飛行計劃上傳至飛行控制系統(tǒng),進行起飛、飛行、降落,采集影像數(shù)據(jù)、記錄飛行的POS(Position Orientation System,簡稱POS)數(shù)據(jù)、獲取飛行數(shù)據(jù);地面監(jiān)測系統(tǒng)顯示無人機飛行航跡,地面工作人員據(jù)此監(jiān)視無人機工作情況;飛行任務(wù)完成后,下載航測數(shù)據(jù)。基本流程如圖1.

圖1 無人機航測外業(yè)基本流程圖
(2)航線規(guī)劃
根據(jù)地面分辨率大小、相機CCD 大小、焦距,確定飛行航高;根據(jù)地形復雜程度,如高差大小,確定航向重疊度、旁向重疊度的大小,航向重疊度一般設(shè)置在80%以上,旁向重疊度設(shè)置在60%以上;根據(jù)飛機續(xù)航時間,劃分飛行架次。
(3)像控點布設(shè)與測量
像控點布設(shè)一般采用區(qū)域網(wǎng)布點方案,布點個數(shù)根據(jù)測區(qū)地形調(diào)整。測量方式采用RTK測量。像片控制點中的平面控制點要求選在影像清晰的細小線狀地物點、明顯地物拐角點,高程控制點還要求高程起伏較小,選點困難地區(qū),可考慮實地布設(shè)控制點。為了滿足大比例測圖需求,一般采用實地布設(shè)控制點。
1.2 內(nèi)業(yè)數(shù)據(jù)處理
航飛數(shù)據(jù)獲取后,采用內(nèi)業(yè)數(shù)據(jù)處理軟件如pix4Dmapper、ContextCapture等進行無人機數(shù)據(jù)處理,主要流程為:導入航飛的原始影像數(shù)據(jù)、POS數(shù)據(jù),進行影像預處理,修正影像畸變和相機檢校;自動進行連接點提取和自由網(wǎng)平差,進行影像相對定向;加入外業(yè)控制點,進行區(qū)域網(wǎng)平差、糾正,進行絕對定向;生成正射影像圖(DOM)、數(shù)字表面模型(DSM)、點云、實景三維模型等數(shù)據(jù);數(shù)字高程模型(DEM)、數(shù)字線劃圖(DLG)則要借助立體測圖軟件、地理信息系統(tǒng)(GIS)軟件以及外業(yè)調(diào)繪等進一步生產(chǎn)。基本流程如圖2.
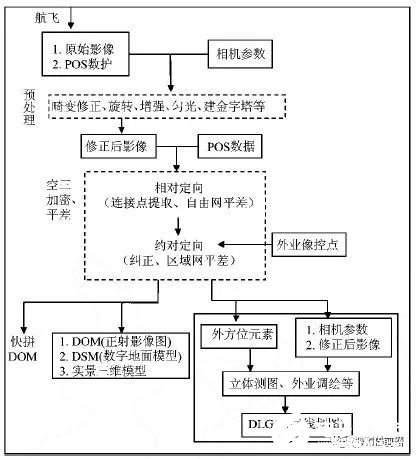
圖2 無人機內(nèi)業(yè)數(shù)據(jù)處理流程圖
2.1 工作區(qū)地理位置
工作區(qū)位于廣東省陽山縣南部太平鎮(zhèn)的牛鼻巖地區(qū),面積約13km2.地貌上屬丘陵地帶,為典型的喀斯特地貌,地形上左右兩邊為少量的平坦耕地,其余為喀斯特峰林,山山相連,植被覆蓋茂密。
2.2 無人機數(shù)據(jù)獲取
采用武漢縱橫天地公司SKYLAND系列無人機的DF150型號無人機平臺獲取數(shù)據(jù)。該款無人機為旗艦型電動固定翼無人機,具有長航時、超纖薄的特點,翼展2m,續(xù)航時間150min,作業(yè)效率高,爬升速率高,起飛方式多樣化,既可以采用彈射器起飛,也可以使用彈力繩起飛,采用傘降方式降落,最大限度保護相機,遙控器手動或半自動控制實現(xiàn)復雜區(qū)域精準降落,抗風力強,智能化操作,配備全畫幅3640萬像素索尼A7R相機,滿足高分辨率需求。
根據(jù)工作區(qū)范圍,實際飛行兩個架次。受地形影響,像控點只布設(shè)在左右兩邊平坦地區(qū),共計20個,采用合眾思壯RTK進行測量。
1∶2000DLG數(shù)據(jù)生產(chǎn)
3.1 數(shù)據(jù)處理
采用Bentley公司的ContextCapture軟件進行無人機數(shù)據(jù)處理,主要流程為:影像和POS導入→自動空三處理(相對定向)→相片刺點(絕對定向)→成果輸出。這里的成果為DOM、DSM以及實景三維模型。DLG的生產(chǎn)則要進一步借助立體測圖軟件獲取,采用DP-Moderler測圖軟件進行水系、居民地、交通等地理要素的采集,地理要素采集的詳細程度以滿足實際需求為原則。
等高線的生成通過ArcGIS軟件對DSM 去樓高、去樹高后得到DEM,然后生成初始等高線,最后對初始等高線進行平滑、編輯、整理得到最終等高線,等高線的整飾按規(guī)范執(zhí)行。
3.2 成果數(shù)據(jù)
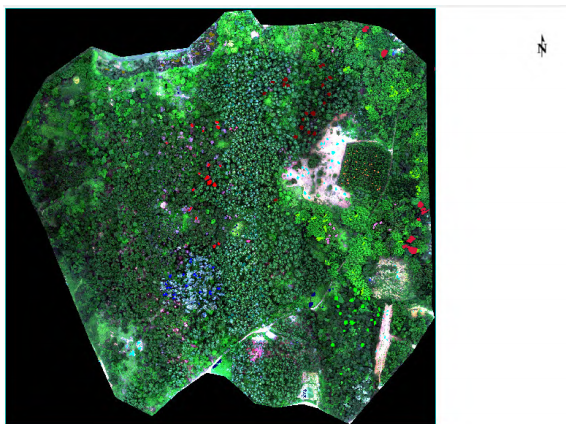
工作區(qū)成果數(shù)據(jù)主要有正射影像DOM 數(shù)據(jù)、實景三維模型、數(shù)字線劃圖DLG 數(shù)據(jù),圖3為DOM 數(shù)據(jù),圖4為實景三維模型數(shù)據(jù),圖5為DLG數(shù)據(jù)。

圖3 DOM 數(shù)據(jù)

圖4 實景三維模型
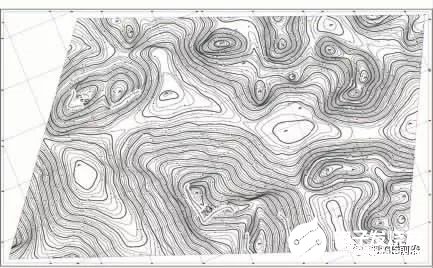
圖5 DLG(局部)
3.2.1 影像分辨率
《CH/T 9008.3-2010基礎(chǔ)地理信息數(shù)字成果1∶500、1∶1000、1∶2000數(shù)字正射影像圖》規(guī)范中要求1∶2000數(shù)字正射影像圖影像地面分辨率應(yīng)優(yōu)于0.2m。根據(jù)計算,工作區(qū)生成的DOM分辨率為0.095m,滿足規(guī)范要求。
3.2.2 平面位置精度
《CH/Z 3003-2010 低空數(shù)字航空攝影測量內(nèi)業(yè)規(guī)范》中要求1∶2000數(shù)字線劃圖(B類)、數(shù)字正射影像圖(B類)的地物點對附近野外控制點的平面位置中誤差平地、丘陵地不應(yīng)大于2.5m,山地、高山地不應(yīng)大于3.75m。隨機選取50個地物點,以工作區(qū)已有的高分辨率正射影像作為真實坐標來源(該數(shù)據(jù)平面位置精度優(yōu)于0.5m),點位坐標差值統(tǒng)計見表1.

依據(jù)《GB/T24356-2009測繪成果質(zhì)量檢查與驗收》,按同精度檢測,地物點的點位中誤差計算公式為式(1):
計算結(jié)果顯示DOM 數(shù)據(jù)平面位置中誤差為±2.13m,滿足規(guī)范要求。
3.2.3 高程精度
由于工作區(qū)除左右兩邊為平坦地區(qū),其余地區(qū)植被茂密,難以通行,且GPS信號差,因此未能采集到足夠數(shù)量的高程控制點,高程采用無人機POS系統(tǒng)自動空三解算成果,精度未檢驗。
結(jié)束語
本文采用無人機航測獲取影像數(shù)據(jù),然后進行數(shù)據(jù)處理,快速獲取了工作區(qū)DOM、DLG和實景三維模型。經(jīng)精度檢驗,成果數(shù)據(jù)影像分辨率、平面位置精度能滿足1∶2000測圖需求,而高程方面,由于工作區(qū)植被茂密、難以通行,高程采用無人機POS系統(tǒng)自動解算結(jié)果。通過數(shù)據(jù)生產(chǎn)的實踐,有如下結(jié)論和探討。
4.1 結(jié)論
(1)無人機航測優(yōu)勢明顯
無人機航測影像獲取快捷方便,無需專業(yè)航測設(shè)備,普通民用單反相機即可作為影像獲取的傳感器,操作手經(jīng)過短期培訓學習即可操控整個系統(tǒng);成本相對低廉;飛行條件需求降低,不需要專門機場和跑道,可在普通公路上滑跑起降或采用彈射方式起飛和傘降方式降落;影像獲取周期短、時效性強,從準備航飛到獲取影像周期短,影像獲取后可立即處理得到航測成果,時效性強;實踐證明,成果能滿足大比例尺成圖要求。
(2)航測外業(yè)是數(shù)據(jù)來源,精度尤為重要,因此要做好精度控制航測外業(yè)數(shù)據(jù)精度受很多因素影響,為保證數(shù)據(jù)精度,實際飛行中要做好以下工作:攝影分區(qū)有無必要:對于高差起伏大、地物單一地區(qū)容易出現(xiàn)航攝漏洞,最好進行攝影分區(qū),使分區(qū)內(nèi)的高差滿足航飛要求;漏洞補攝:漏洞補攝時最好采用前一次航攝飛行的數(shù)碼相機,保證數(shù)據(jù)的一致性;航飛時間選擇:綜合考慮季節(jié)、天氣、太陽高度角、陰影倍數(shù)等,選擇合適的航飛時間;飛行質(zhì)量控制:設(shè)置相機對焦、曝光時間,考慮飛機姿態(tài)穩(wěn)定性,設(shè)置影像重疊度等,獲取的影像要清晰、層次豐富、色調(diào)柔和;像控點布設(shè):重點考慮布點方式、布點個數(shù)、采集精度等。
4.2 探討
(1)如何更好地去除樹高
DSM 數(shù)據(jù)是包含地面附著物高程信息的數(shù)據(jù),要想得到DEM,就要去除地面附著物如建筑物、植被等的高程信息。對于植被稀疏區(qū),可以采用點云分類的方法來解決這一問題,通過將點云進行分類得到地面點、建筑物、植被等類別,然后用地面點這一類別的點云構(gòu)建DEM。而本文的工作區(qū)植被茂密,裸露點極少,通過點云分類的方法無法得到足夠數(shù)量的地面點,因此不能構(gòu)建DEM。本文采用減去平均樹高的方法來去除樹高,考慮到樹高不一致,可以結(jié)合植被分類數(shù)據(jù)細化每一類的平均樹高,從而得到較為準確的去除樹高的DEM。
(2)無人機POS系統(tǒng)自動解算的高程數(shù)據(jù)精度問題
由于工作區(qū)受地形影響,未采集到足夠數(shù)量的高程控制點,因此采用無人機POS系統(tǒng)自動解算的高程結(jié)果,這對于偏遠的茂密森林植被區(qū)不失為一種快速獲取高程數(shù)據(jù)的方法。隨著無人機航測技術(shù)的發(fā)展,通過集成高精度的RTK、IMU系統(tǒng)以及改進數(shù)據(jù)處理算法,無控制點測圖能滿足大比例尺測繪生產(chǎn)的精度需求,屆時將大大減少外業(yè)工作量,極大地提高無人機數(shù)據(jù)生產(chǎn)的時間和效益,也將更好地促進無人機航測的應(yīng)用。
責任編輯:gt









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論