 電子發(fā)燒友App
電子發(fā)燒友App


傳統(tǒng)的道路施工方案優(yōu)化決策過程中,往往是技術(shù)人員帶上設(shè)計(jì)圖紙到現(xiàn)場(chǎng),根據(jù)地形特征勘察周邊環(huán)境,分析現(xiàn)場(chǎng)地形與設(shè)計(jì)意圖之間的關(guān)系。李斌等基于DEM 數(shù)據(jù)并對(duì)其插值,通過三角化建立拓?fù)潢P(guān)系進(jìn)而得到可視化地形。聶啟詳利用數(shù)字化地形圖劃分規(guī)則方格網(wǎng),再根據(jù)等高線點(diǎn)計(jì)算格網(wǎng)點(diǎn)高程,構(gòu)筑三維地形模型。杜陽陽等應(yīng)用無人機(jī)獲取的數(shù)據(jù)測(cè)繪大比例帶狀地形圖并建立地形模型; 趙元應(yīng)用無人機(jī)傾斜攝影繪制城市區(qū)域大比例地形圖,提高了測(cè)圖的效率,體現(xiàn)了無人機(jī)獲取數(shù)字地形的高效性。
在道路工程施工 BIM 應(yīng)用方面,多應(yīng)用 BIM 模型進(jìn)行設(shè)計(jì)工程量計(jì)算,或者應(yīng)用于設(shè)計(jì)結(jié)構(gòu)物之間的碰撞檢查。城市道路工程施工環(huán)境復(fù)雜,沿線交通設(shè)施、周邊地物地貌變化頻繁,傳統(tǒng)作業(yè)模式需要攜帶圖紙反復(fù)到現(xiàn)場(chǎng)踏勘核對(duì),效率低下,而且無法直觀了解設(shè)計(jì)結(jié)構(gòu)物與周邊環(huán)境之間是否和諧美觀。基于這種情況,提出應(yīng)用無人機(jī)獲取航測(cè)地形并與 BIM 技術(shù)相融合,創(chuàng)建城市道路施工環(huán)境模型,以快速獲取施工周邊區(qū)域的地形環(huán)境。
1 基本原理與流程
1. 1 基本原理
無人機(jī)航測(cè)能夠快速獲取實(shí)景三維地形模型, 可直接用來量測(cè)坐標(biāo)、距離、面積、坡度、填挖方量等,方便施工環(huán)境實(shí)景模型的快速更新,使 BIM 設(shè)計(jì)模型能夠在復(fù)雜多變的施工環(huán)境中進(jìn)行實(shí)景呈現(xiàn)。將 BIM 創(chuàng)建的道路設(shè)計(jì)模型與無人機(jī)航測(cè)獲取的實(shí)景環(huán)境模型進(jìn)行匹配融合,建立能夠真實(shí)反映 設(shè)計(jì)結(jié)構(gòu)與復(fù)雜施工環(huán)境空間關(guān)系的三維模型( 稱之為“施工環(huán)境模型”) ,該模型具有實(shí)時(shí)性、可量測(cè)、可視化、可追溯性等特點(diǎn),能夠?yàn)楣こ淌┕す芾硖峁Q策依據(jù)。
( 1) 應(yīng)用無人機(jī)傾斜攝影測(cè)量方法獲取施工區(qū)域內(nèi)的地形原始影像資料,對(duì)影像資料進(jìn)行處理,通過空三計(jì)算、坐標(biāo)轉(zhuǎn)換,生成具有項(xiàng)目施工坐標(biāo)屬性的實(shí)景三維地形模型。
( 2) 在統(tǒng)一的項(xiàng)目施工坐標(biāo)系統(tǒng)下,將實(shí)景三維地形模型點(diǎn)云格式數(shù)據(jù)與通過 BIM 技術(shù)創(chuàng)建的施工結(jié)構(gòu)物設(shè)計(jì)模型進(jìn)行融合處理,創(chuàng)建基于實(shí)景三維背景下的施工環(huán)境模型。
( 3) 當(dāng)工況發(fā)生變化時(shí),可通過無人機(jī)航測(cè)補(bǔ)飛更新地形模型; 設(shè)計(jì)方案產(chǎn)生變更時(shí),可通過 BIM 模塊對(duì)設(shè)計(jì)模型進(jìn)行更新。
( 4) 可利用該模塊實(shí)現(xiàn)工況的實(shí)景漫游、設(shè)計(jì)模型與地形模型的碰撞檢查、空間信息的量測(cè)、施工模擬、對(duì)工程項(xiàng)目環(huán)境條件的研究分析等,為施工方案優(yōu)化、模擬,臨建工程建設(shè)規(guī)劃,工程計(jì)量等提供影像和數(shù)據(jù)信息,為復(fù)雜環(huán)境下城市道路工程施工方案優(yōu)化、進(jìn)度調(diào)整提供快速?zèng)Q策的依據(jù)。
1. 2 系統(tǒng)組成
建模系統(tǒng)由地形原始數(shù)據(jù)獲取模塊、地形原始數(shù)據(jù)處理模塊、參數(shù)化 BIM 模型模塊、參數(shù)化模型融合及應(yīng)用模塊四大部分組成( 如表 1) 。
表 1 施工環(huán)境模型建模系統(tǒng)組成
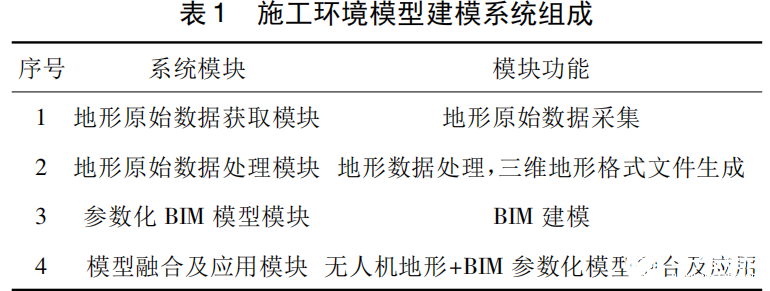
序號(hào) 系統(tǒng)模塊 模塊功能
1 地形原始數(shù)據(jù)獲取模塊 地形原始數(shù)據(jù)采集
2 地形原始數(shù)據(jù)處理模塊 地形數(shù)據(jù)處理,三維地形格式文件生成
3 參數(shù)化 BIM 模型模塊 BIM 建模
4 模型融合及應(yīng)用模塊 無人機(jī)地形+BIM 參數(shù)化模型融合及應(yīng)用
施工環(huán)境模型的工藝流程如圖 1 所示。
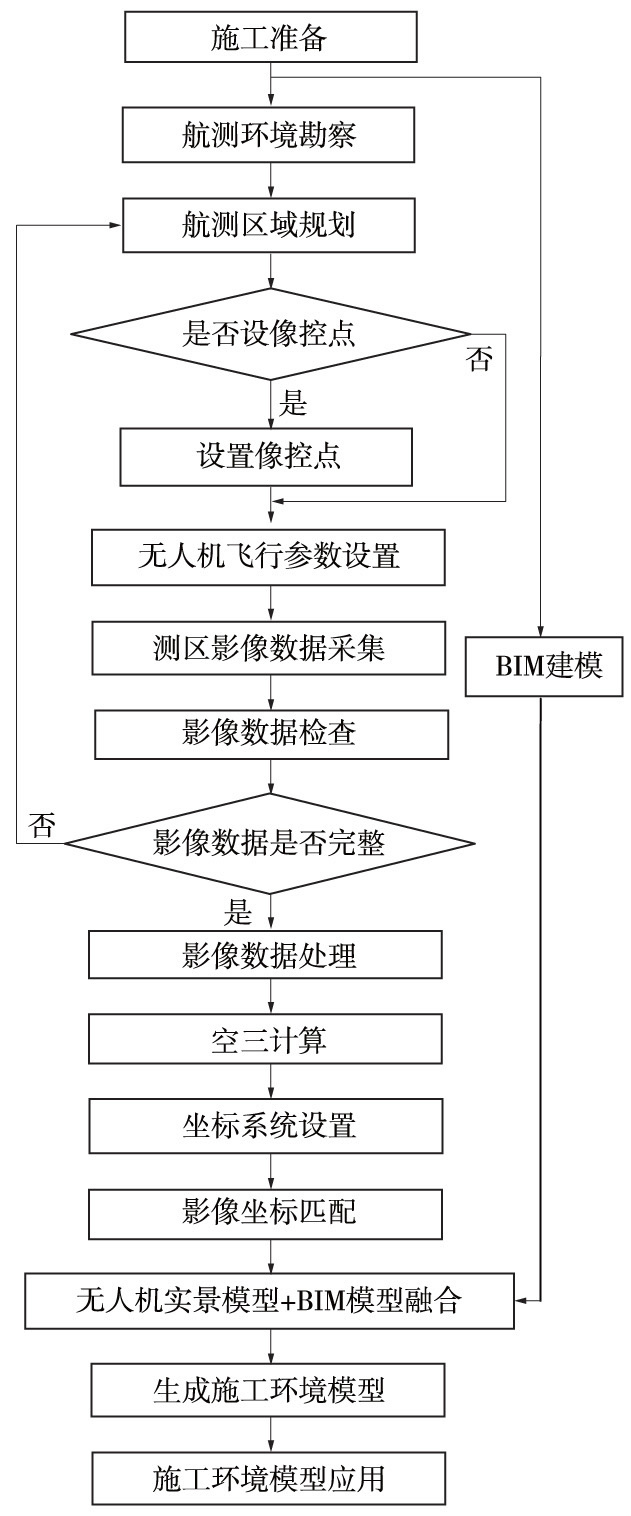
圖1 建立施工環(huán)境模型工藝流程
2 無人機(jī)航測(cè)地形模型的獲取
2. 1 準(zhǔn)備工作
( 1) 收集施工圖紙、資料,核實(shí)工程施工范圍;
( 2) 航測(cè)區(qū)域報(bào)備;
( 3) 無人機(jī)飛前測(cè)試、檢查;
( 4) 坐標(biāo)測(cè)量設(shè)備測(cè)試、檢查;
( 5) 耗材準(zhǔn)備。
2. 2 航測(cè)環(huán)境勘察
( 1) 工程沿線航測(cè)環(huán)境勘察: 主要勘察測(cè)區(qū)范圍內(nèi)結(jié)構(gòu)物高度分布情況,確定無人機(jī)航高。
( 2) 工程沿線 5 km 外部環(huán)境勘察: 目標(biāo)范圍內(nèi)有無軍事禁區(qū)、機(jī)場(chǎng)起降航線及其它禁飛區(qū)。
2. 3 航測(cè)區(qū)域規(guī)劃
根據(jù)設(shè)計(jì)圖紙、施工范圍及其他需求,確定航測(cè)區(qū)域和飛行方案,并編制飛行計(jì)劃。
2. 4 像控點(diǎn)設(shè)置
根據(jù)測(cè)量精度要求、無人機(jī)性能和測(cè)區(qū)地形,布設(shè) 像控點(diǎn)并測(cè)定像控點(diǎn)坐標(biāo),作為影像坐標(biāo)匹配的基準(zhǔn)。
( 1) 無免像控型無人機(jī)一般每隔 500 m 左右均勻設(shè)置像控點(diǎn),地形起伏變化較大時(shí)需加密設(shè)置。帶GNSS RTK 系統(tǒng)的無人機(jī)能夠?qū)崟r(shí)獲取影像曝光時(shí)刻的像片中心坐標(biāo),可根據(jù)精度需要在地形起伏變化較大的地段加密設(shè)置部分像控點(diǎn)。
( 2) 像控點(diǎn)采用彩色噴漆圖案( 在地面上或紙板上噴繪一個(gè)半徑為 0. 5 m 的十字符號(hào)) ,確保在拍攝的影像中能夠清晰分辨符號(hào)中心。用印刷圖案的紙板作像控點(diǎn)時(shí),紙板可回收再次利用。
( 3) 像控點(diǎn)應(yīng)按航線方向編號(hào),坐標(biāo)可采用 GNSS RTK 測(cè)量或全站儀導(dǎo)線測(cè)量。
2. 5 航測(cè)區(qū)域及飛行參數(shù)設(shè)置
按照無人機(jī)飛行方案設(shè)置各項(xiàng)參數(shù),當(dāng)外業(yè)實(shí)施過程中遇到特殊情況時(shí)( 如電池電量不足或天氣原因影響) ,可根據(jù)現(xiàn)場(chǎng)實(shí)際情況適當(dāng)調(diào)整飛行參數(shù)。
( 1) 在地形原始數(shù)據(jù)獲取系統(tǒng)中設(shè)置航測(cè)區(qū)域, 并按照系統(tǒng)提示的步驟,設(shè)置規(guī)劃航測(cè)區(qū)域內(nèi)無人機(jī) 的飛行線路,同時(shí)設(shè)置相關(guān)飛行參數(shù),以及相機(jī)拍攝角 度、拍攝間隔、航向重疊度、旁向重疊度、無人機(jī)飛行速 度等。飛行高度依據(jù)現(xiàn)場(chǎng)勘察的情況確定,應(yīng)保證無 人機(jī)飛行高度高于飛行區(qū)域內(nèi)最高結(jié)構(gòu)物 5 m 以上。
( 2) 將每一條飛行路線進(jìn)行編號(hào)并保存在系統(tǒng)數(shù)據(jù)庫內(nèi),以便影像數(shù)據(jù)質(zhì)量差或者影像遺失時(shí)可按原線路進(jìn)行補(bǔ)拍。
( 3) 在飛行控制系統(tǒng)與無人機(jī)連接的狀態(tài)下,將飛行線路數(shù)據(jù)上傳至無人機(jī)運(yùn)行數(shù)據(jù)庫內(nèi),并確保傳輸過程連續(xù)進(jìn)行。
2. 6 無人機(jī)試飛
參數(shù)設(shè)置完畢后,應(yīng)對(duì)無人機(jī)進(jìn)行試飛,檢查飛行過程中相機(jī)拍攝情況、飛行路徑執(zhí)行情況、影像數(shù)據(jù)存儲(chǔ)情況及像控點(diǎn)在圖像數(shù)據(jù)上的清晰度等。
2. 7 實(shí)景地形影像資料獲取
( 1) 根據(jù)無人機(jī)試飛情況確定各項(xiàng)參數(shù),開展全線影像數(shù)據(jù)的獲取工作; 每塊航測(cè)區(qū)域的影像數(shù)據(jù)單獨(dú)導(dǎo)出存儲(chǔ)并編號(hào)。
( 2) 對(duì)全線航拍原始數(shù)據(jù)進(jìn)行初步檢查,確保數(shù)據(jù)的完整性,再導(dǎo)入數(shù)據(jù)處理軟件生成虛擬三維地形; 若存在影像缺失區(qū)塊,應(yīng)根據(jù)實(shí)際缺失范圍進(jìn)行補(bǔ)拍, 直至影像數(shù)據(jù) 100% 完整。
2. 8 實(shí)景地形影像數(shù)據(jù)處理
( 1) 按照每條航線的編號(hào),將完整的影像數(shù)據(jù)依次導(dǎo)入處理軟件中,并核對(duì)導(dǎo)入的圖片數(shù)量與原始數(shù)據(jù)文件夾里的圖像數(shù)量是否一致。
( 2) 將空間參考系統(tǒng)設(shè)置為與控制點(diǎn)對(duì)應(yīng)的工程施工坐標(biāo)系; 將控制點(diǎn)坐標(biāo)參數(shù)信息導(dǎo)入數(shù)據(jù)處理軟件; 找出可在圖像上看到地面標(biāo)識(shí)控制點(diǎn)的圖像,并與導(dǎo)入文件數(shù)據(jù)坐標(biāo)點(diǎn)號(hào)一一對(duì)應(yīng); 在 3D 視圖中找到可以看到控制點(diǎn)的圖像; 根據(jù) 2D 及 3D 視圖,找到匹配的影像,與控制點(diǎn)進(jìn)行關(guān)聯(lián)融合。
( 3) 參數(shù)信息關(guān)聯(lián)完畢后,對(duì)數(shù)據(jù)進(jìn)行保存。
( 4) 進(jìn)行首次空中三角測(cè)量計(jì)算。
( 5 ) 完成全部控制點(diǎn)與影像上標(biāo)識(shí)點(diǎn)的匹配工作。
( 6) 進(jìn)行第二次空中三角測(cè)量計(jì)算。
( 7) 檢查投影誤差的均方根精度( 所有數(shù)值應(yīng)小于 0. 6) ,如果精度不滿足要求,應(yīng)重新進(jìn)行影像與坐標(biāo)控制點(diǎn)的匹配工作。
2. 9 實(shí)景三維地形生產(chǎn)
( 1) 運(yùn)行建模軟件,新建項(xiàng)目,選擇空間參考系統(tǒng)。切塊模式設(shè)置為規(guī)則平面格網(wǎng)。
( 2) 參數(shù)選擇為三維網(wǎng)格形式,并將格式改變?yōu)镺penSceneGraph binary ( OSGB) ; 同時(shí),坐標(biāo)系設(shè)置為工程施工坐標(biāo)系。
( 3) 生成無人機(jī)航測(cè)三維地形模型。
3 BIM 參數(shù)化模型建立
( 1) 根據(jù)工程項(xiàng)目設(shè)計(jì)圖紙,編制 BIM 建模實(shí)施方案;
( 2) 根據(jù)任務(wù)要求,在施工圖紙的基礎(chǔ)上,建立項(xiàng)目的族庫文件,為主體結(jié)構(gòu)的建模做準(zhǔn)備;
( 3) 依據(jù)工程項(xiàng)目的建模環(huán)境,將建模軟件系統(tǒng)的坐標(biāo)系與無人機(jī)航測(cè)地形坐標(biāo)系統(tǒng)設(shè)置為一致;
( 4) 對(duì)項(xiàng)目 CAD 圖紙進(jìn)行簡化處理,刪除冗余線條,并確定 BIM 項(xiàng)目的建模基點(diǎn);
( 5) 基于項(xiàng)目基點(diǎn),將 CAD 圖形導(dǎo)入 BIM 建模軟件中,作為參數(shù)化模型建立的基礎(chǔ);
( 6) 通過前期建立的族庫文件以及手工建模,完成 BIM 模型的創(chuàng)建。
4 無人機(jī)地形數(shù)據(jù)+BIM 模型匹配融合
4. 1 基于第三方軟件地形數(shù)據(jù)軟件的模型融合
將 BIM 模型保存為 FBX 格式文件( FBX 格式文件可保留模型的參數(shù)化信息) 。將 FBX 格式文件轉(zhuǎn)化為帶參數(shù)化信息的 3DS 格式文件,再將 BIM 模型導(dǎo)入到已打開處理完畢模型的地形數(shù)據(jù)軟件中。導(dǎo)入過程中需進(jìn)行坐標(biāo)轉(zhuǎn)化參數(shù)設(shè)置,以保證 BIM 模型和地形模型的精確結(jié)合。
4. 2 基于 BIM 軟件的模型融合
將無人機(jī)地形轉(zhuǎn)化為 PCD 點(diǎn)云格式文件,再導(dǎo)入到含有 BIM 模型的 BIM 軟件環(huán)境中; 導(dǎo)入過程中需進(jìn)行坐標(biāo)轉(zhuǎn)化參數(shù)設(shè)置,保證 BIM 模型和地形模型的精確結(jié)合。
4. 3 基于三維效果軟件的模型融合
選擇 OBJ 格式文件為最終地形模型文件,同時(shí)將BIM 模型轉(zhuǎn)化為 FBX 格式文件,通過 3D Max 軟件的文件導(dǎo)入功能,將無人機(jī)地形與 BIM 模型融合。導(dǎo)入的過程中需進(jìn)行坐標(biāo)轉(zhuǎn)化參數(shù)設(shè)置,使 BIM 模型與地形模型精確匹配,形成施工環(huán)境模型。
4. 4 質(zhì)量控制措施
( 1) 航拍作業(yè)前對(duì)像控點(diǎn)坐標(biāo)、高程進(jìn)行復(fù)核;
( 2) 在影像數(shù)據(jù)處理過程中,確保像控點(diǎn)坐標(biāo)參數(shù)與像控點(diǎn)圖形中心準(zhǔn)確對(duì)應(yīng);
( 3) 影像成像不清晰或因建筑物遮擋影像信息不全時(shí),應(yīng)進(jìn)行局部補(bǔ)飛或重飛;
( 4) 對(duì)地形特征點(diǎn)坐標(biāo)、高程進(jìn)行抽檢,通過地形模型獲取的坐標(biāo)與實(shí)測(cè)坐標(biāo)比較,檢核地形模型的實(shí)際精度,點(diǎn)位偏差超出相應(yīng)比例地形圖的精度時(shí),應(yīng)分析原因,并采取加密像控點(diǎn)的方式對(duì)影像數(shù)據(jù)重新進(jìn)行處理;
( 5) BIM 模型與地形模型融合前,必須對(duì)模型進(jìn)行核查,確保設(shè)計(jì)模型與設(shè)計(jì)圖紙一致;
( 6) 地形模型坐標(biāo)系應(yīng)與 BIM 設(shè)計(jì)模型坐標(biāo)系精確匹配至工程施工坐標(biāo)系內(nèi),使融合后創(chuàng)建的施工環(huán)境模型的空間位置與施工坐標(biāo)系準(zhǔn)確一致。
5 工程實(shí)例及結(jié)論
( 1) 工程概況
杭州市艮山路提升改造暨地下綜合管廊項(xiàng)目: 地面道路為城市主干路,雙向 6 ~ 8 車道,原有道路改造長度約 1. 52 km,主要工程范圍包括地面道路 1. 52km、高架橋約 1. 52 km、地下管廊約 1. 9 km、地面橋梁1 座、人行天橋 1 座、排水及相關(guān)附屬等工程。道路交改工作量大,房屋、管線密布,施工環(huán)境復(fù)雜。
( 2) 應(yīng)用情況
利用無人機(jī)建立施工范圍內(nèi)的三維實(shí)景地形模型,作為建立施工環(huán)境模型的基礎(chǔ)( 如圖 2) 。
圖2 無人機(jī)航測(cè)三維地形模型
根據(jù)工程設(shè)計(jì)圖紙,創(chuàng)建 BIM 參數(shù)化模型。人行天橋、地面橋樁基礎(chǔ)及墩柱基礎(chǔ) BIM 模型如圖 3 所示。
圖3 工程結(jié)構(gòu)物BIM模型
將地面橋梁、高架橋、人行天橋等結(jié)構(gòu)物 BIM 模型與無人機(jī)航測(cè)地形模型進(jìn)行融合,建立施工環(huán)境模型( 如圖 4) 。
通過對(duì)施工環(huán)境模型的分析,使復(fù)雜的施工環(huán)境得以直觀的展現(xiàn),結(jié)構(gòu)物與現(xiàn)場(chǎng)道路、房屋之間的空間位置關(guān)系一目了然。可以在室內(nèi)從施工環(huán)境模型上確認(rèn)拆遷房屋邊界、數(shù)量、確定道路交改范圍及方案,為臨建工程規(guī)劃、施工場(chǎng)地布置方面及時(shí)提供參考依據(jù)和規(guī)劃載體,在施工過程中為施工方案模擬、分析、比選,以及基于模型的面積量測(cè)、體積量測(cè)、坐標(biāo)量測(cè)提供準(zhǔn)確的空間信息數(shù)據(jù),其更新航測(cè)地形時(shí)間僅為傳統(tǒng)數(shù)字化測(cè)圖建模的 1 /3。
圖4 融合后的施工環(huán)境模型
6 結(jié)論
( 1) 復(fù)雜城市道路工況下,無人機(jī)航測(cè)法建立施工環(huán)境模型具有操作流程簡單,可隨工程進(jìn)展及時(shí)對(duì)實(shí)景模型進(jìn)行快速更新,確保環(huán)境模型的現(xiàn)勢(shì)性等優(yōu)點(diǎn)。
( 2) 可直接在模型中量測(cè)坐標(biāo)、距離、面積、坡度、填挖方等參數(shù),具有空間信息可量測(cè)的特點(diǎn)。
( 3) 施工環(huán)境模型使設(shè)計(jì)模型能夠真實(shí)地展示在施工實(shí)際場(chǎng)景之中,可在室內(nèi)隨時(shí)進(jìn)行設(shè)計(jì)模型與實(shí)際工況之間的碰撞檢查,便于提前對(duì)碰撞可能產(chǎn)生的影響進(jìn)行預(yù)判分析,及時(shí)對(duì)施工方案進(jìn)行調(diào)整,具有真實(shí)性、可視化、可模擬推演等特點(diǎn)。
( 4) 多期實(shí)景模型真實(shí)地記錄了施工過程信息,可對(duì)關(guān)鍵施工過程進(jìn)行場(chǎng)景再現(xiàn),呈現(xiàn)整個(gè)工程施工過程以及工程竣工時(shí)期的實(shí)景模型,具有關(guān)鍵工況環(huán)境可追溯的特點(diǎn)。
責(zé)任編輯:gt









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論