 電子發燒友App
電子發燒友App


三維激光掃描技術是測繪領域繼全站儀、GPS技術后的又一次革命產品,被稱為“實景復制”或 “逆向工程”技術。近景攝影測量是其部分領域的競爭產品。三維激光掃描技術始于 1995 年,目前是朝陽行業。在國內,正在出臺相關的規范和標準。該技術能夠真實描述掃描對象的整體結構及形態特征,快速準確地生成三維數據模型,防止基于點數據的分析方法導致的片面性,應用方面大大提高了工作效率,填補了部分行業空白。
國內外該技術已廣泛應用于變形監測、工程測量、地形測量、斷面和體積量測等領域。但傳統的三維激光技術與應用有許多弊端:
傳統三維建模方式從數據采集到成圖周期太長,如航測;
傳統街景方式為二維,清晰度低,不夠逼真;
傳統城市部件采集方式效率低。
因此,現代三維激光技術基本上都是基于地面或機載某種單一方式,或將兩種方式結合在一起的應用。傳統方式采用單一方式的激光掃描,但不可避免地會有漏洞,一般都是采用軟件內插點云的方式填補空洞。采用空地一體掃描技術,可以將傳統的被動測量、間接測量有效轉化為主動測量、直接測,可以選擇性地使用地面三維掃描儀補充特殊地區真實點云,達到更加精確的結果。因此探索空地一體掃描技術在測繪工程中的應用方法與理論,將具有一定的現實意義,如圖1所示。
圖1 空地一體掃描技術
01、空地一體掃描技術簡介
三維激光掃描技術不斷發展并日漸成熟,三維掃描儀的巨大優勢就在于可以快速掃描被測物體,無需反射棱鏡即可直接獲得高精度的掃描點云數據,如此則可以高效地對真實世界進行三維建模和虛擬重現。因此,其已成為當前研究的熱點之一,并在文物數字化護、土木工程、工業測量、自然災害調查、數字城市地形可視化、城鄉規劃等領域有廣泛的應用。測量技術的快速發展,各種先進的測量裝備及儀器也隨之投入到信息化測繪作業中,信息化測繪作業也越來越向空地一體化發展。空地一體掃描技術可以定義為: 采用機載激光輔以地面三維激光等多種掃描技術,快速采集物體表面真實可靠的三維數據的技術,其流程如圖 2 所示。

圖2 空地一體掃描技術整體流程
1.1 硬件集成: 核心技術
空地一體掃描的核心技術包括: 位置姿態( positioandorientation system,POS)positioandorientation system,POS) 、慣性導航系統( inertial navigation system,INS) 、捷聯慣性導航系統( strapdown inertial navigation system,SINS) 、慣性測器件( inertialmeasurement unit,IMU) 、激光建模測(lasermodeling instrument,LMI) 。
POS 的本質是 SINS GPS 構成的組合系統。SINS 可實時連續地測量載體的位置、速度和姿態等全部運動參數,但是其誤差隨時間累積。GPS 可以提供載體的高精度位置和速度,但是 GPS 信號易受到遮擋、干擾等因素影響,且數據更新率低,因此將SINS 和 GPS 相組合,可以綜合二者的優點,實現優勢互補,是一種較為理想的位置姿態測量系統,如圖3所示。
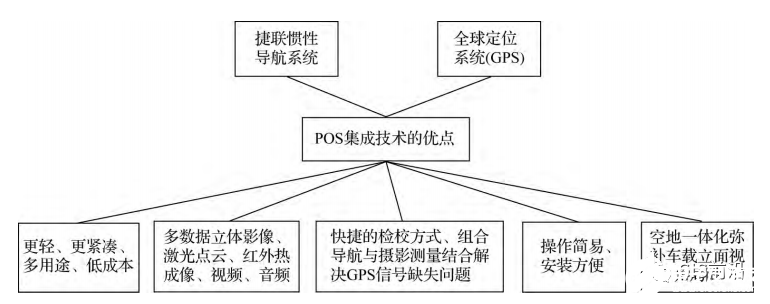
圖3 SINS 與 GPS 相結合
1.2 時間同步數: 數據采集頻率內插
由于數據采集頻率不同,在對數據融合時,需要以時間為標志,對數據進行內插處理和數據匹配,結合傳感器檢定信息,分別求得每一掃描及拍照時刻傳感器的運動位置與姿態參數。
1.3 激光技術指標計算
基于激 光 技 術 指 標 的 假 設 前 提: 假 定 轉 速50 圈,即每秒激光掃描儀掃描頻率可達 50 條線,相當于 100 k /50-2 k 個點在 360°的空間均勻分布,此時角分辨率 = 2 × 3. 14 /2000.約為 3 mrad,在時 速50 km / h,在 100 m 外的數據點縱向和橫向的間距僅為 0.3 m 左右,如圖 4 所示。車行方向激光點間距計算: 車 速 50 km / h =13 m / s( 13 /50 = 0.26 m) 。掃描方向點距計算: 圓弧長 = 半徑×弧度; 100×3 /1000 = 0.3 m。100 m 外半徑為: 0.3/1000×100= 0.03 m,即3 cm,如圖4所示。
圖 4 激光建模測量設備
02、空地一體掃描技術特點
2.1 空地一體,多方位獲取高精度點云數據
輕型無人機機載雷達搭配地面三維激光掃描儀,可快速多角度獲取高精度點云數據,具有傳統測量方式難以完成的技術優勢。
2.2 非接觸式數據獲取,直接采集物體表面的三維數據
三維激光掃描技術采用非接觸掃描目標的方式進行測量,無需反射棱鏡,對掃描目標物體不需進行任何表面處理,直接采集物體表面的三維數據,所采集的數據完全真實可靠。可以解決危險目標、環境( 或柔性目標) 及人員難以企及的情況,具有傳統測量方式難以完成的技術優勢。
2.3 主動發射掃描光源( 激光) ,不受掃描環境時間和空間的約束
三維激光掃描技術采用主動發射掃描光源( 激光) ,通過探測自身發射的激光回波信號獲取目標物體的數據信息,因此在掃描過程中,可以實現不受掃描環境時間和空間的約束。
2.4 快速、高精度獲取海量點云數據
三維激光掃描技術可以快速、高精度獲取海量點云數據,可以對掃描目標進行高密度的三維數據采集,從而達到高分辨率的目的,可準確反映出地物信息。
2.5 可與 GPS 系統配合使用
這些功能大大擴展了三維激光掃描技術的使用范圍,對信息的獲取更加全面、準確。內置數碼攝相機的使用,增強了彩色信息的采集,使掃描獲取的目標信息更加全面。GPS 定位系統的應用,使得三維激光掃描技術的應用范圍更加廣泛,與工程測量的結合更加緊密,近一步提高了測量數據的準確性。
03、該技術在某地形測繪中的應用
3.1 實例應用
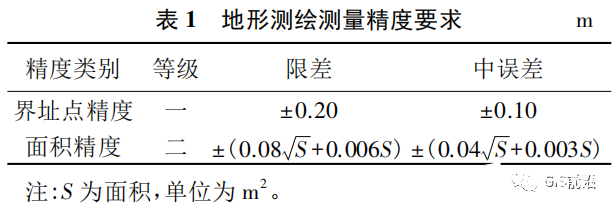
如圖 5 所示,該項目位于廣州番禺區,測區總面積約 18 km2.總建筑面積約 1.5 km2 ; 項目成果要求為 1 : 500 地形地籍圖; 房屋依河涌而建,整體比較分散; 但房屋間距較小,小范圍內房屋密集,且房屋周圍樹木茂密。無人機航測手段由于房屋密集幾乎看不到地面,傳統測繪手段由于信號遮擋,通視不便,獲取目標地物真實數據也異常困難,且傳統手段耗費人力物力較大,18 km2 幾乎要做 6 個月。測繪精度要求本次不動產權籍調查中地籍測量精度按照國家及省相關標準執行,農村房屋測量面積量算精度要求為三級,見表1.
圖 5 項目范圍線
3.2 實例應用過程
采用無人機機載三維激光雷達+地面站補點的方式作業,外業投入 3 人,航飛了 20 個架次( 采用大疆飛行平臺,航時有限,每架次只能飛行 16 min) ,外 業數據采集完,經過內業點云數據解算,坐標轉換,再經過自主研發的 SouthLidar 軟件中進行地形地籍圖生產,最終生成 DLG 成果。如圖 6 所示。將采集的 191 個檢查點跟激光點云的地面點數據做比較,由軟件自動生成圖 7 中報告,最終得出高程精度中誤差為 6.9 cm,116 個檢查點得出的高程精度中誤差為 5.1 cm,完全滿足 1 ∶ 500 航測高程精度要求。
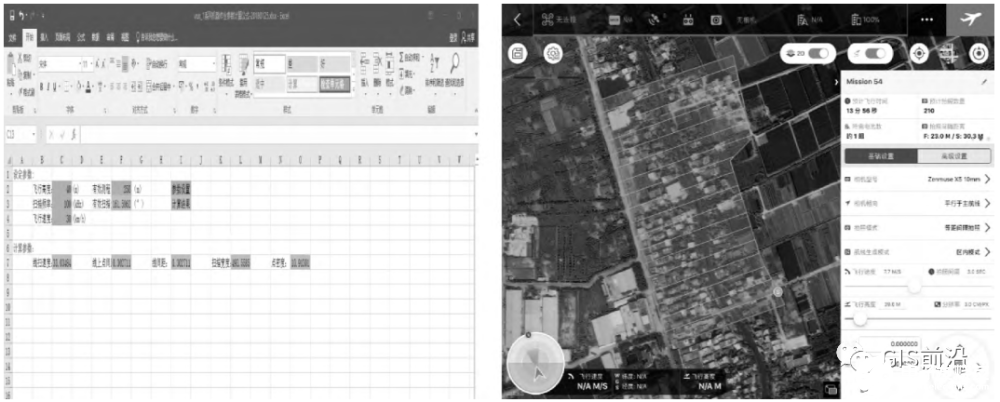
圖6 設計無人機航線外業采集現場(根據激光參數)

圖7 點云處理及精度監測
3.3 技術創新及 4D 產品生成
基于無人機機載三維激光雷達和地面站補點方式的技術創新如圖 8—圖10 所示。
( 1) 直接快速生成 DEM、DSM、DLG、DOM 等產品,達到定測、施工圖設計的精度要求。
( 2) 應用機載 LiDAR 生成 0.15 m 高精度的數字地面模型,有效克服了氣候多變、地形復雜、植被茂盛等難題。
( 3) 無需或極少量控制測量,減少勘察設計環節和流程,大大縮短了工作周期,提高了工作效率。由于地形條件的限制在外業采集的碎部點很難一次性生成理想的等高線,如樓頂上控制點,另外還圖生產,最終生成 DLG 成果。如圖6所示。將采集的 191 個檢查點跟激光點云的地面點數據做比較,由軟件自動生成圖 7 中報告,最終得出高程精度中誤差為 6.9 cm,116 個檢查點得出的高程精度中誤差為 5.1 cm,完全滿足 1 : 500 航測高程精度要求。因現實地貌的多樣性和復雜性,自動構成的數字地面模型與實際地貌不太一致,因此可以通過修改三角網修改這些局部不合理的地方。具體技術有:
( 1) 過濾三角形。可根據需要輸入符合三角形中最小角的度數或最大邊長大于最小邊長的倍數等條件的三角形。如果出現 CASS 7.0 在建立三角網后點無法繪制等高線,可過濾掉部分形狀特殊的三角形。另外,如果生成的等高線不光滑,也可以用此功能將不符合要求的三角形過濾掉,再生成等高線。
( 2) 增加三角形。如果要增加三角形時,可選擇“等高線”菜單中的“增加三角形”項,依照屏幕的提示在要增加三角形的地方用鼠標點取,如果點取的地方沒有高程點,系統會提示輸入高程。
( 3) 三角形內插點。選擇此命令后,可根據提示輸入要插入的點在三角形中指定點( 可輸入坐標或用鼠標直接點取) ; 提示高程( 米) = 時,輸入此點高程。通過此功能可將此點與相鄰的三角形頂點相連構成新三角形,同時原三角形會自動被刪除,如圖 11 所示。
圖 8 基于激光雷達的植被穿透直接獲取地面點的數據
圖 9 基于車載三維數據采集系統模型的數據采集技術
圖 10 制作系統空間同步數據———重復軌跡檢校方法
圖 11 快速采集城市街景圖( 南方 SouthLiDAR 軟件)
04、結論與建議
基于空地一體掃描技術的車載三維數據采集系統在高樓大廈林立的城市中運行,GPS 信號時有時無。又由于交通狀況的影響,車載平臺時走時停,這些都使得車載系統的工作環境十分獨特,同時也會存在容易失鎖的地方: 如立交橋、過街天橋、高樓底下、兩邊是樹的林蔭道,一般失鎖時間為 30s,因此本文關心組合導航系統的精度主要是關心在失鎖30s 或 1 min 之后可以達到的精度。總體而言,空地一體掃描技術是現階段較為新穎的技術,相對于傳統全站儀、RTK技術而言,具有非接觸式、效率高、速度快等優勢,相對于無人機航測技術而言說具有全天候作業、高程精度高、可穿透植被縫隙直接獲取真實地面高程的優勢,因此在高精度地面高程測繪、地籍測繪、電力巡線、應急監測、森林植被采集及灘涂等人工無法到達的作業環境等領域有其巨大的優勢,本文關于空地一體掃描技術及其應用進行分析和探討,以及對于我國三維激光技術的推廣,起到一定的促進作用。
責任編輯:gt


































 工商網監
工商網監
評論