 電子發(fā)燒友App
電子發(fā)燒友App


近些年,各種無(wú)人機(jī)高空秀屢見(jiàn)不鮮,在剛剛過(guò)去的七夕夜上,上海警方也運(yùn)用無(wú)人機(jī)開(kāi)啟了一場(chǎng)反欺詐安防宣傳。
相比于技術(shù)較為成熟的高空飛行,無(wú)人機(jī)如何在更復(fù)雜和現(xiàn)實(shí)的低空環(huán)境中運(yùn)行,一直是該領(lǐng)域研究的難點(diǎn)。
近日,瑞典呂勒奧工業(yè)大學(xué)和加利福尼亞理工學(xué)院聯(lián)合研究團(tuán)隊(duì)提出一項(xiàng)最新解決方案,有望實(shí)現(xiàn)無(wú)人機(jī)在現(xiàn)實(shí)環(huán)境中自由穿行。
目前這篇論文成果已同步發(fā)表至預(yù)印論文庫(kù)arXiv上。
硬核無(wú)人機(jī),能導(dǎo)航能避障
無(wú)人機(jī)在現(xiàn)實(shí)生活的應(yīng)用場(chǎng)景越來(lái)越豐富,如高空巡邏,搜索與救援,地下礦井導(dǎo)航,自動(dòng)包裹遞送等等。
而豐富的應(yīng)用場(chǎng)景,對(duì)無(wú)人機(jī)自動(dòng)導(dǎo)航技術(shù)也提出了更高的要求。比約恩·林德奎斯特(Bjorn Lindqvist)稱,
“我們先前已經(jīng)發(fā)表了幾篇有關(guān)無(wú)人機(jī)自動(dòng)避障和導(dǎo)航的論文,而在最近的研究中,我們開(kāi)始考慮如何使無(wú)人飛行器在城市環(huán)境或者動(dòng)態(tài)的移動(dòng)環(huán)境中,自由穿梭而避免與人員或其他車輛碰撞”。
比約恩·林德奎斯特是瑞典呂勒奧工業(yè)大學(xué)和加利福尼亞理工學(xué)院聯(lián)合研究團(tuán)隊(duì)中的一員,近日,該團(tuán)隊(duì)在IEEE Robotics Automation Letters上發(fā)表的一篇最新論文。
論文中提出一種基于非線性模型預(yù)測(cè)控制(Nonlinear Model Predictive Control ,NMPC)的計(jì)算技術(shù),可以為無(wú)人機(jī)提供更好的自主導(dǎo)航和避障能力。
更具體地說(shuō),他們通過(guò)NMPC算法來(lái)預(yù)測(cè)無(wú)人機(jī)周圍環(huán)境中的障礙物軌跡,同時(shí)使用分類模型來(lái)區(qū)分不同類型的軌跡并預(yù)測(cè)障礙物的未來(lái)位置。
研究人員通過(guò)四組實(shí)驗(yàn)評(píng)估了NMPC方案,結(jié)果發(fā)現(xiàn)無(wú)人機(jī)模型能夠在多個(gè)移動(dòng)障礙物包圍的情況下避免碰撞。四項(xiàng)實(shí)驗(yàn)分別為:
避免彈球時(shí)保持位置:不同方法下,無(wú)人機(jī)在保持姿勢(shì),同時(shí)避免任何障礙物方面的性能表現(xiàn),其中彈球?yàn)檎系K物。
避開(kāi)行人時(shí)保持位置:無(wú)人機(jī)在保持姿勢(shì),同時(shí)避免障礙物方面的性能表現(xiàn),其中行人為障礙物。
彈跳條件:障礙物提供運(yùn)動(dòng)軌跡,檢測(cè)NMPC對(duì)障礙物路徑的預(yù)測(cè)和規(guī)避能力。
多重障礙:檢測(cè)在多種障礙物包圍情況下,NMPC系統(tǒng)的規(guī)避能力,并測(cè)試最小安全距離。
Lindqvist稱:“由于NMPC通過(guò)對(duì)未來(lái)狀態(tài)進(jìn)行預(yù)測(cè)和優(yōu)化來(lái)進(jìn)行工作,這種方法將控制,局部路徑規(guī)劃和動(dòng)態(tài)避障功能集成在一個(gè)控制層中,為動(dòng)態(tài)避障場(chǎng)景提供了快速且計(jì)算穩(wěn)定的解決方案。接下來(lái),我們來(lái)介紹一下具體的實(shí)驗(yàn)成果。
可預(yù)測(cè)路徑,躲避多個(gè)障礙物
論文中介紹了NMPC成本函數(shù)和約束條件公式化,以及解決動(dòng)態(tài)障礙的方法。同時(shí)為了證明所提出的控制體系結(jié)構(gòu)的功效,也進(jìn)行了多種情況下的測(cè)試實(shí)驗(yàn)。
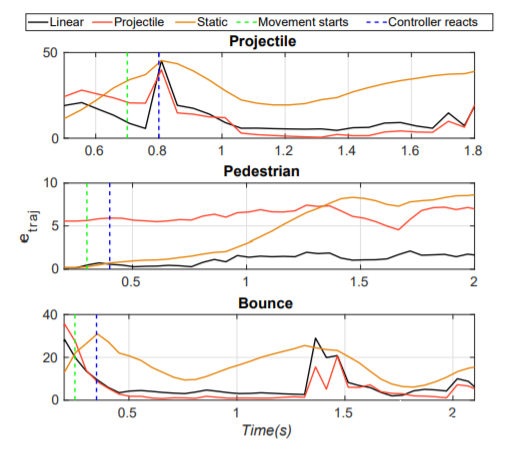
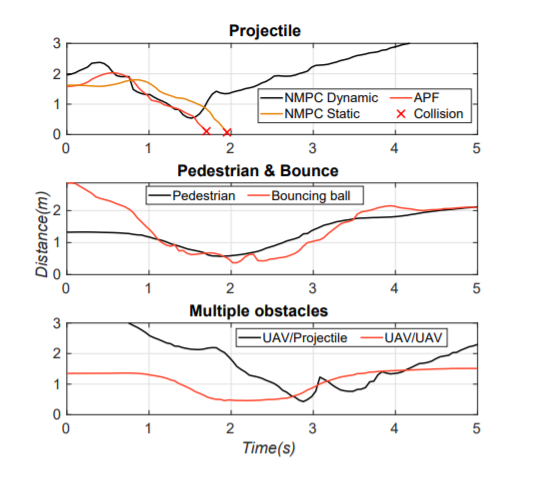
實(shí)驗(yàn)一:避開(kāi)彈丸時(shí)保持位置:無(wú)人機(jī)的任務(wù)是避開(kāi)任何進(jìn)入的障礙物而保持飛行姿勢(shì),其中障礙物是向無(wú)人機(jī)發(fā)射彈球。論文中,NMPC約束方法與人工勢(shì)場(chǎng)等其他方法進(jìn)行了比較(靜態(tài)環(huán)境下能夠快速響應(yīng)并躲避障礙物)。
考慮到障礙物的靜態(tài)性,空間半徑和障礙物半徑分別設(shè)置為1m,這比避免靜態(tài)障礙物所需的安全距離要大得多,同時(shí)將勢(shì)場(chǎng)控制器的參考調(diào)整為盡可能積極。放寬NMPC的輸入速率約束,以加快響應(yīng)速度。
在保持與緩慢移動(dòng)的障礙物的距離的同時(shí),這兩種方法都無(wú)法避免與彈丸障礙物發(fā)生碰撞,障礙物進(jìn)入影響區(qū)域的時(shí)間很短, 這些控制器直到與無(wú)人機(jī)發(fā)生碰撞,才能及時(shí)避開(kāi),而且這些控制器也不知道障礙物的未來(lái)位置在哪里,因此,它們的避讓動(dòng)作可能會(huì)使它們沿著障礙物的軌跡移動(dòng)。
實(shí)驗(yàn)二:避免行人時(shí)保持姿勢(shì):實(shí)驗(yàn)中,“行人”在直接碰撞過(guò)程中向無(wú)人機(jī)走去,以測(cè)試無(wú)人機(jī)的避障能力和反應(yīng)速度。
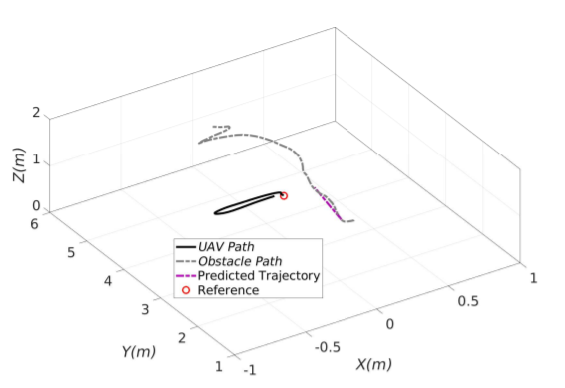
其中,行人在0.3 s內(nèi)進(jìn)入實(shí)驗(yàn)障,礙物的半徑設(shè)置為0.6 m,從無(wú)人機(jī)和障礙物的路徑可以看出,從識(shí)別出軌跡的時(shí)間步長(zhǎng)開(kāi)始,飛行控制器便開(kāi)啟了回避機(jī)制。
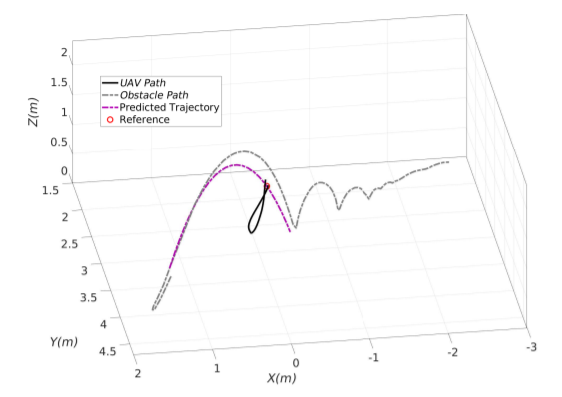
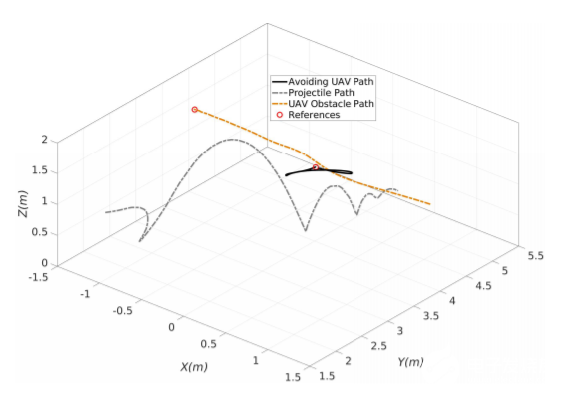
實(shí)驗(yàn)三:與前兩種情況一樣,無(wú)人機(jī)的任務(wù)是保持位置,同時(shí)避免進(jìn)入的障礙物。障礙物半徑設(shè)置為0.4m,被拋出經(jīng)過(guò)第一次反彈后影響無(wú)人機(jī)路徑。
如圖,投擲障礙物的時(shí)間約為0.25 s,而控制器的反應(yīng)速度為0.35 s。這表明即使是簡(jiǎn)化的軌跡模型也仍然可以對(duì)障礙物路徑做出足夠好的預(yù)測(cè),尤其是在增加沿預(yù)測(cè)的安全半徑。
下圖為基于回避操作開(kāi)始時(shí)的初始條件的障礙物的預(yù)測(cè)軌跡,以及障礙物和UAV的測(cè)量路徑。
無(wú)人機(jī)成功避開(kāi)了最小距離為0.38 m的障礙物,而求解器時(shí)間達(dá)到了33 ms的峰值。由于求解器公差和測(cè)量結(jié)果不理想,因此預(yù)期會(huì)出現(xiàn)小范圍的約束沖突。
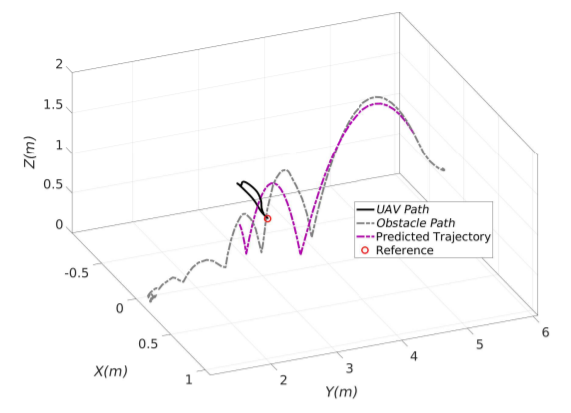
實(shí)驗(yàn)四:避免多個(gè)動(dòng)態(tài)障礙,在避開(kāi)無(wú)人機(jī)的碰撞航線上設(shè)置一架單獨(dú)的無(wú)人機(jī),同時(shí)向其投擲彈丸,兩者的障礙物半徑都設(shè)置為 0.4.軌跡分類和預(yù)測(cè)方案應(yīng)用于兩個(gè)障礙物的單獨(dú)測(cè)量,但在其他方面與單個(gè)障礙物情況相同。兩個(gè)無(wú)人飛行器和彈丸的軌跡如圖,
躲避的無(wú)人飛行器、最近的無(wú)人飛行器以及障礙物三者之間的最小距離分別為0.45 m和0.42 m。
需要注意的是,避空無(wú)人機(jī)可以在較長(zhǎng)的時(shí)間內(nèi)保持安全距離,同時(shí)避開(kāi)進(jìn)入的彈丸。實(shí)驗(yàn)中,障礙無(wú)人飛行器一旦開(kāi)始運(yùn)動(dòng),回避操縱就會(huì)立即開(kāi)始。
進(jìn)一步研究方向
總體來(lái)講,研究人員所提出的NMPC架構(gòu)和軌跡分類方案成功地在所有可能的情況下提供了無(wú)碰撞運(yùn)動(dòng)路徑。在線優(yōu)化問(wèn)題可以在所需的50 ms的限制內(nèi)解決,而不會(huì)違反已建立的障礙或輸入限制。不過(guò),該方法目前也存在一定的局限性:
總體性能基于對(duì)軌跡分類的依賴:即使對(duì)于有限的軌跡研究,其方案也可能出現(xiàn)軌跡分類錯(cuò)誤的情況。
使用對(duì)未來(lái)障礙物位置的明確預(yù)測(cè):如果預(yù)測(cè)方案失敗或誤差太大,無(wú)人飛行器可能會(huì)完全忽略碰撞過(guò)程中的障礙物。
論文中指出,未來(lái)這項(xiàng)工作還會(huì)進(jìn)一步優(yōu)化和拓展,具體方向包括更一般的軌跡識(shí)別,障礙物位置和速度的提取,軌跡分類方案優(yōu)化等。更重要的是,隨著更多障礙物擴(kuò)展以及與求解器時(shí)間的關(guān)系,分析NMPC的復(fù)雜性問(wèn)題,以了解在何時(shí)間接地在控制層解決障礙物更合適。
責(zé)任編輯:gt









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論