 電子發(fā)燒友App
電子發(fā)燒友App


一些人認為,無人駕駛飛行器 (UAV) 或眾所周知的無人機的商業(yè)意義可能與互聯(lián)網一樣重要。航空攝影和攝像等備受矚目的應用在很大程度上已被無人機普及,具有大眾吸引力和相應的高容量。更深奧的用途包括農業(yè)管理,預計它們在醫(yī)療應用中的使用會增加。
由于公司為企業(yè)提供交鑰匙解決方案,“無人機即服務”的概念已經出現(xiàn)。可以說,圍繞立法的澄清有助于而不是阻礙新興行業(yè),盡管對整體有效載荷有限制,但它們的優(yōu)勢幾乎是有保證的。亞馬遜和 Facebook 等大型組織正在積極開發(fā)計劃,分別使用無人機在偏遠地區(qū)運送貨物和連接互聯(lián)網。
這些新興應用將越來越依賴于自動駕駛,因此,無人機很可能成為第一種完全融入社會的真正自動駕駛汽車。這是一個活躍的研究領域,商業(yè)系統(tǒng)已經出現(xiàn),例如家庭監(jiān)控無人機,它可以在檢測到移動時自動導航建筑物的周邊,并通過互聯(lián)網將其看到的內容傳遞給房主。
除了無人駕駛,無人機也不受束縛。包括電力、處理和有效載荷的緊湊型系統(tǒng)。為了真正有用,它們需要穩(wěn)定和高效,即使在危險和多變的天氣條件下也是如此。除了一次充電盡可能長時間地運行外,它們還不可避免地需要能夠自行對接以進行充電,從而使它們幾乎可以無限期地自主運行。這種水平的精確控制和導航正在創(chuàng)造對新技術的需求,并突出了無人機開發(fā)的兩個最關鍵的特性:電機控制和導航。
電子速度控制
作為一個系統(tǒng),無人機可以用包括飛行控制器、電子速度控制器(ESC)、電池和有效載荷在內的功能元素來描述。ESC與飛控分離但仍由飛控管理是相關的。這主要是因為它是一項復雜的功能,可以從專用解決方案中受益。
電調負責控制每臺電機的速度,因此,通常每臺電機都有一個專用的電調。為了協(xié)調它們的操作,所有電調必須能夠直接或通過飛控間接地相互通信;在典型的無人機中,可能會有四個 ESC 和四個電機。ESC 已成為一個卓越的領域,通常表現(xiàn)為一個可以輕松集成的完整子系統(tǒng),現(xiàn)在可用的 ESC 解決方案數(shù)量雖小但數(shù)量不斷增加。
由于穩(wěn)定性和效率在無人機技術中至關重要,因此控制電機的方式是無人機操作的基礎。許多 ESC 供應商采用的方法是磁場定向控制 (FOC),這是一種控制電機扭矩并通過該技術控制速度的技術。如果實施得當,F(xiàn)OC 可以在不引入不穩(wěn)定性的情況下提供快速的加速度變化,從而使無人機能夠執(zhí)行復雜的機動,同時最大限度地提高效率。驅動矢量的快速計算在 FOC 中至關重要,這就是為什么它已成為一般以電機控制為目標的微控制器供應商關注的焦點,尤其是 ESC。
當今無人機中最受青睞的電機形式是無刷直流電機,因為它體積小、成本相對較低且經久耐用。為了進一步降低材料清單,無人機制造商通常會采用無傳感器拓撲;也就是說,電機的位置是通過監(jiān)測電機的狀態(tài)而不是轉子的位置來確定的。通過 FOC 算法控制無傳感器 BLDC 電機非常復雜,這也是領先的微控制器制造商開始出現(xiàn)交鑰匙解決方案的另一個原因。
一個例子是STMicroelectronics的STEVAL-ESC001V1電子速度控制器 (ESC) ,它將 STMicroelectronics 的STM32F303CBT7微控制器和電機控制 SDK 與其L6398驅動器和 STL160NS3LLH7 功率 MOSFET結合在一起。它們共同構成了一個完整的解決方案,用于使用無傳感器 FOC 算法驅動單個三相無刷電機,無論是 BLDC 還是 PMSM(永磁同步電機)。功率 MOSFET 是 N 通道 30 V、160 A STripFET H7 器件。該設計可提供 20 A 的最大 RMS 電流,足以驅動專業(yè)無人機中使用的電機。圖 1 顯示了該解決方案的框圖。
STMicroelectronics 指出,使用 FOC,而不是某些 ESC 中使用的梯形控制算法,可以提供更好的扭矩控制,同時它提供的實施還提供了減速期間的主動制動和能量回收。
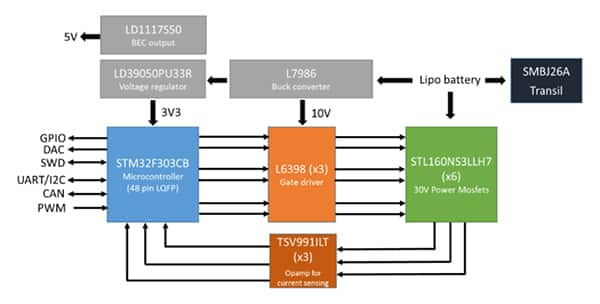
圖1:意法半導體STEVAL-ESC001V1基于磁場定向控制的電子調速方案框圖,專為無人機開發(fā)。
填充板的尺寸略小于 30 mm x 60 mm,如圖 2(頂部)和圖 3(底部)所示,突出顯示了關鍵功能組件。
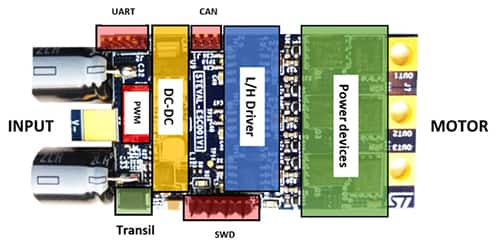
圖 2:STEVAL-ESC001V1(頂部)。
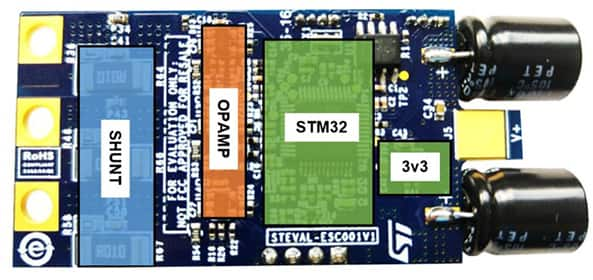
圖 3:STEVAL-ESC001V1(底部)。
評估板使用ST-Link/V2編程器進行編程,固件可以使用 ST 電機控制工作臺進行配置(提供使用 MC 工作臺的簡短視頻介紹)。使用該軟件和評估板,工程師可以分析電機并編譯驅動該電機所需的固件。雖然用于驅動電機各相的信號由電路板計算和應用,但 PWM 信號用于設置電機的速度。如圖 4 所示,1060 μs 和 1860 μs 之間的脈沖分別用于將電機速度設置在其最小值和最大值之間。
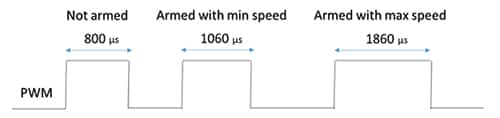
圖 4:用于調節(jié)由 STEVAL-ESC001V1 控制的電機速度的 PWM 信號。
電調參考設計
總體而言,電機控制對于許多半導體制造商來說是一個越來越重要的應用領域,尤其是那些擁有強大微控制器產品組合的制造商。這包括德州儀器,該公司開發(fā)并生產了一種 FOC 解決方案,該解決方案預裝在精選Piccolo MCU的 ROM 中并通過 API 訪問。
如果沒有傳感器來提供有關電機位置的反饋,則選擇是以開環(huán)配置運行電機或使用某種其他形式的反饋。應該注意的是,閉環(huán)配置提供了更好的控制并導致更好的整體性能。提供閉環(huán)操作所需的反饋由稱為觀察器的專用固件功能提供,該功能利用電機繞組中產生的反電動勢來估計其位置。因此,固件也稱為估計器。
在 TI 的解決方案中,估計器固件被稱為 InstaSPIN-FAST,它代表通量、角度、速度和扭矩。FAST 被描述為一種通用的三相電機軟件編碼器,能夠與一系列電機實現(xiàn)一起工作,包括同步和異步直流和交流電機。FOC 扭矩控制器軟件 InstaSPIN-FOC 對其進行了補充,該軟件是 TI MotorWare 軟件包的一部分;免費使用,免費下載的解決方案。但是,該解決方案的 FAST 部分是專有的,僅在支持的 MCU 中作為基于 ROM 的代碼提供;雖然 InstaSPIN-FOC 可以從 RAM 或閃存執(zhí)行,但 FAST 算法必須始終從 ROM 執(zhí)行。
德州儀器 (TI) 的無人機 ESC高速無傳感器 FOC參考設計提供了一種評估 InstaSPIN 技術的簡單方法。它基于 C2000 Piccolo LaunchPad LAUNCHXL-F28069M開發(fā)板(圖 5)和DRV8305EVM三相電機驅動 BoosterPack 評估模塊(圖 6)。
圖 5:C2000 Piccolo LaunchPad LAUNCHXL-F28069M 開發(fā)板。

圖 6:DRV8305EVM 三相電機驅動器 BoosterPack 評估模塊。
在這樣一個競爭激烈的空間中,與易用性相匹配的性能通常可以成為選擇特定解決方案的非常有說服力的理由,在這方面,TI 已盡一切努力在競爭中脫穎而出。例如,控制算法需要了解與被控制電機有關的某些參數(shù),但 TI 堅持認為其解決方案需要提供的電機參數(shù)較少,以至于不需要數(shù)據表。此外,與大多數(shù)其他解決方案不同,一旦確定了電機,InstaSPIN-FOC 和 FAST 解決方案就無需調整。
估計器的運行精度是另一個關鍵參數(shù),在此,TI 表示其解決方案可以在一個電周期內開始跟蹤,并且可以將精度保持在 1 Hz 以下。其他解決方案通常僅在超過 5 Hz 的頻率下準確,并且在高頻下可能會受到影響。這些優(yōu)勢還意味著 TI 的解決方案可以在啟動時提供 100% 的扭矩,并且在零速下完全穩(wěn)定。
像這樣的開發(fā)平臺和交鑰匙解決方案的可用性意味著現(xiàn)在更容易開始無人機設計。TI 表示,其解決方案可在兩分鐘內啟動并運行,這突顯了先進的 FOC 解決方案在很短的時間內已變得多么先進。然而,導航不一定如此,但它正在迅速發(fā)展,并且不可避免地很快就會有可以為各種無人駕駛車輛提供完全自主導航的解決方案。
差分全球導航衛(wèi)星系統(tǒng)
導航主要因一件事而變得復雜:障礙物。如果沒有任何需要避開的障礙物,汽車就已經可以自動駕駛了,但事實上,如果從 A 點到 B 點是一條沒有任何東西的直線,那么從 A 點到 B 點會簡單得多。幸運的是,在天空中,情況經常如此。由于這個原因,自主無人機可能遲早會變得司空見慣。當然,仍然有必要考慮碰撞檢測和避免技術,但總的來說,飛行的物體比不飛行的物體有很大的優(yōu)勢。
全球導航衛(wèi)星系統(tǒng) (GNSS) 的使用現(xiàn)在已成為導航的同義詞,當與地圖軟件一起使用時,它成為一種強大的組合。然而,眾所周知,GNSS 僅能精確到米以內,而不是自主無人機所需的厘米,而自主無人機本身可能測量不到一米。對于某些應用,例如檢查大型開放區(qū)域或數(shù)公里的地上油管,這可能是可以接受的。對于新興的無人機應用,例如貨物交付,需要更高的準確性。
如果沒有支持這種精度水平的基礎設施,自主設備將依靠機器視覺來幫助它們在現(xiàn)實世界中導航。但是,出現(xiàn)了一些解決方案,可以提供適合某些應用的準確度水平。他們采用差分 GNSS (DGNSS),它使用基站提供的校正數(shù)據來改進和校正由移動物體(稱為流動站)得出的定位數(shù)據。
該技術被稱為實時運動學 (RTK),并由海事服務無線電技術委員會 (RTCM) 定義的國際公認標準涵蓋。它依賴于基站和流動站之間的實時通信通道,最常用于高端測量設備。然而,該技術開始在定位為大眾市場解決方案的模塊中提供。一個例子是 u-blox 的 GNSS 定位模塊,包括NEO-M8P-0和NEO-M8P-2模塊,旨在分別啟用流動站和基站。
該公司表示,這些模塊的設計總體上可以滿足無人駕駛車輛的需求,但包括使其特別適合無人機的功能,例如移動基線模式;使基站能夠像流動站一樣移動的功能。例如,這可能與從更大、更傳統(tǒng)的為社區(qū)服務的送貨車輛發(fā)射和返回的送貨無人機有關。
這些模塊基于 u-blox M8 GNSS 接收器,兼容 GPS、GLONASS 和北斗衛(wèi)星導航網絡,能夠同時使用 GPS 和 GLONASS 或北斗,提供更快的首次定位時間。但是,u-blox 指出,如果 RTK 更新率很關鍵,那么它們應該只在 GPS 模式下使用。圖 7 說明了這些模塊的操作方式。
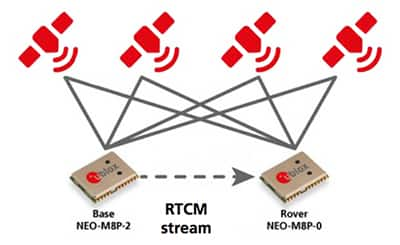
圖 7:使用 u-blox NEO-M8P 模塊創(chuàng)建具有厘米精度定位的 DGNSS 解決方案。
基站向流動站提供 RTCM 3 消息流(參考站參數(shù))。然后,流動站必須解決載波相位模糊問題,此時它可以進入 RTK 固定模式并開始獲得厘米精度的定位數(shù)據。根據 u-blox 的說法,這個過程通常需要不到 60 秒的時間,稱為收斂時間。只有當接收機能看到至少六顆連續(xù)鎖相衛(wèi)星時,流動站才會進入 RTK 固定模式;如果與 GLONASS 系統(tǒng)同時工作,它需要至少兩顆來自第二個系統(tǒng)的衛(wèi)星才能看到,而北斗則增加到三顆。
在 RTK 模式下運行時,相對于基站位置報告流動站的位置。因此,流動站的絕對位置將參考基站的絕對位置,以及流動站相對于它的位置。這也適用于無人機需要返回充電站為電池充電的應用。當基站工作在移動基線模式時,其絕對位置不再固定。然而,流動站仍然可以保持相對于它的厘米精確定位,例如,當無人機在“跟隨我”模式下運行時,這是適用的。隨著 DGNSS 定位的引入,全自動無人機的概念真正開始形成。
結論
自主性和穩(wěn)定性將是未來無人機的關鍵特征。隨著基于 FOC 的電機控制和 DGNSS 等技術變得更加集成,無人機的快速和持續(xù)發(fā)展是有保證的。此類預集成解決方案的可用性使開發(fā)先進無人機的過程更加簡單,為熱衷于利用令人興奮的新可能性的原始設備制造商提供了機會。
審核編輯:符乾江








 工商網監(jiān)
工商網監(jiān)
評論