 電子發燒友App
電子發燒友App


四軸飛行器是一種大規模使用的無人駕駛飛行器 (UAV) 或無人機。這些用于救援行動、交付、監視、防御、醫療和農業等用途。無人機的主要優點是體積緊湊,易于控制。在本文中,我們將學習如何在電機、飛控和底盤的幫助下,使用 KK2.1.5 飛控設計四軸飛行器(無人機)。
什么是四軸飛行器?
四軸飛行器是一種帶有 4 個電機的多旋翼無人機。Quadcopter 使用電子傳感器和控制系統穩定其飛行。四軸飛行器有兩種類型,即。1- Plus 配置四軸飛行器和 2- 交叉配置四軸飛行器。在本教程中,我們將設計一個 X 形的四軸飛行器。兩種形狀都是穩定的,但在向前飛行中,四軸飛行器在向前飛行中需要偏航控制輸入。兩種配置的偏航控制權限相同,但在交叉配置的情況下,俯仰和橫滾控制權限最多可增加約 30%。四軸飛行器依靠加速度計和陀螺儀等電子傳感器和控制系統來穩定飛行。
建造四軸飛行器所需的組件
框架:
框架是無人機的基本結構,所有部件都安裝在一起。框架應該是剛性的,以便最大限度地減少電機的振動。它由一個中心板組成,電子元件和四個臂連接到中心板上。在下面給出的圖像中,我們可以看到四軸飛行器的框架。

我們將使用寬度為 450mm 的 f450。它由玻璃纖維和耐用的尼龍制成。它有兩塊板,一塊板帶有集成PCB,因此我們可以直接焊接電調。F450 手臂經過加固以防止任何損壞;我們可以輕松地將電機放置在手臂的邊緣。我們使用的是 m2.5 尺寸的螺釘,它們是內六角螺釘或內六角螺釘。
電機:
我們在這里使用了無刷直流電機 (BLDC)。直流電機由用于驅動軸的線圈和磁鐵組成,軸上有一個刷子,負責切換線圈中的功率方向。無刷電機沒有這些刷子。它們在電機的中心有線圈,固定在支架上。它們包含許多安裝在外側圓柱體上的磁鐵,該圓柱體連接到旋轉軸上。所以,線圈是固定的。這意味著,電線可以直接連接到它們,因此不需要刷子。無刷直流電機以更高的速度旋轉,并且比直流電機使用更少的功率(在相同的速度下)。此外,不會因電刷過渡而造成功率損失。在下面給出的圖像中。我們可以看到 1000KV BLDC 電機,它有三個輸入線。
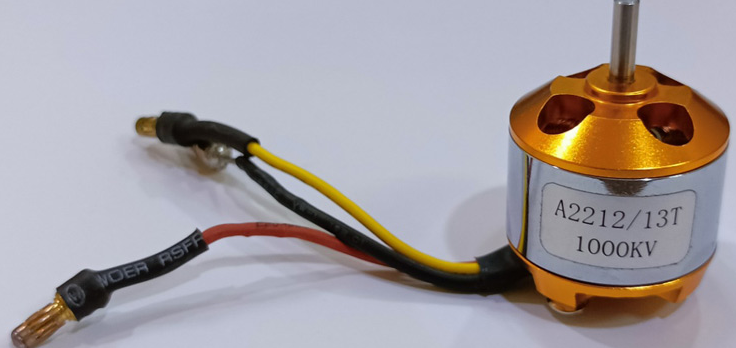
無刷電機帶有 Kv 等級。這意味著如果我們在沒有任何負載的情況下向電機提供 V 電壓,電機將以給定的 RPM(每分鐘轉數)旋轉。
轉速 = Kv * V
在這里,我們使用四個無刷電機,額定電壓為 1000 Kv。
螺旋槳:
螺旋槳安裝在每個無刷電機的頂部。螺旋槳有多種尺寸和形狀。我們使用的是 (10*4.5) 尺寸的螺旋槳,這意味著它的直徑為 10,螺距為 4.5 英寸。直徑給出面積,但間距給出有效面積。如果我們在相同直徑的情況下使用更高螺距的螺旋槳,螺旋槳將產生更大的推力并提升更多的重量,但它也需要更多的動力。高轉速可提供更高的速度和機動性,但舉起的重量更少。

如果我們想用重物穩定飛行無人機,那么我們應該使用旋轉較少但提供更大扭矩的電機,應該使用高螺距螺旋槳。要駕駛四軸飛行器,我們需要 1:2 的重量和推力比。
功率(瓦)= Kp * D 4 * P * RPM 3
在哪里,
Kp = 對于中型螺旋槳,Kp 值為 1.2
D = 螺旋槳直徑
P = 間距
螺旋槳的位置在無人機飛行中起著重要的作用。我們需要注意螺旋槳的形狀,因為螺旋槳可能看起來相同但實際上并不相同,它們可能是彼此的鏡像,就像我們的手是彼此的鏡像但它們不一樣。
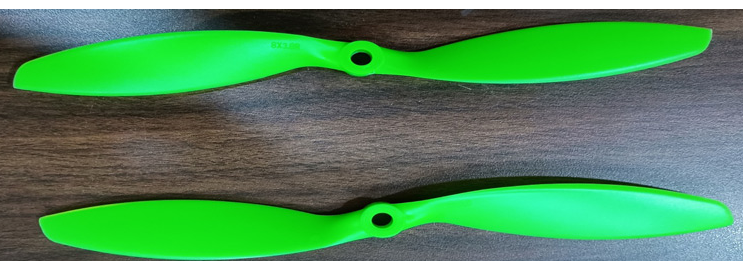
在上圖中,螺旋槳看起來相同但兩者不同,兩者都是彼此的鏡像。螺旋槳應該像這樣旋轉,它們應該向下舀空氣,因為這會導致無人機飛起來。如果螺旋槳向上推動空氣,那么無人機將被推到地面。我們應該放置我們的螺旋槳,以便它們向下舀空氣。螺旋槳平面應與電機旋轉方向一致。如果電機順時針旋轉,則平面應在前面。
ESC(電子調速器)
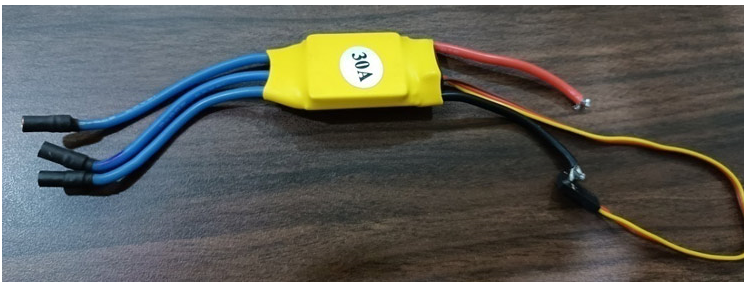
無刷電機是三相電機,因此不能使用直流電源運行。電調連續產生三個頻率信號,相位不同但可控,以保持電機轉動。它具有用于電機的電池輸入和三相輸出。我們在這里使用 30Amp ECS。在下圖中,我們可以看到 ESC 的外觀。我們將為四種不同的電機使用四個 ESC。
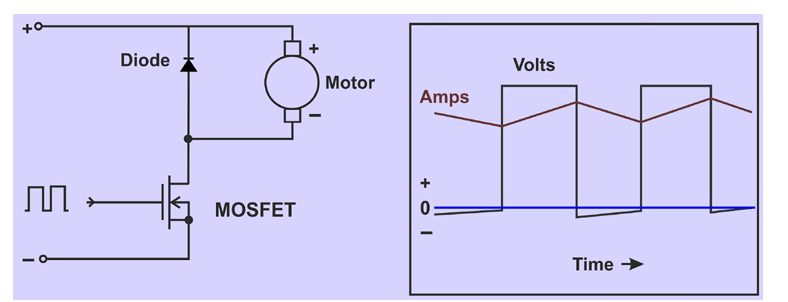
控制器通過脈沖寬度調制 (PWM) 每秒大約 2000 次切換連接到電機的連接和斷開連接。MOSFET 晶體管用作開關而不是機械開關。開關速度快,電機檢測不到。如果連接了 24V 電池,則只有一半時間,電機將電池視為 12V 并以半速運行。開關速度也會影響電機電感,從而使電機電流不斷流動。但是,該電流僅從電池流出一半的時間,因此電池電流將是電機電流的一半。在下圖中,我們可以看到 ESC 的內部電路圖及其電流(安培)隨時間的響應。
電池
鋰聚合物 (LiPo) 電池通常用于四軸飛行器,因為它重量輕且額定電流大。在這里,我們使用了 3 節鋰聚合物電池。單節鋰聚合物電池可提供高達 3.6 V 的電壓。
LiPo 電池容量為 2200mAh,11.V(3 芯)電壓和 30C 放電率。在下圖中,我們可以看到 2200mAH 鋰聚合物電池。這是 2200mAH 鋰聚合物電池的圖像。

LiPo電池有兩個特性參數:
1- 容量-它告訴電池中存儲了多少能量。
2- 放電率——也稱為 C 率,以 C 單位表示。它代表電池可以放電的速率。可以從電池汲取的最大電流 (I max ) 是放電率和容量的乘積。
I max = 電池容量 * 放電率
我們使用的是放電率為 30C 的電池。
所以,我最大= 2200mAh * 30C = 66 安培
這意味著 2200mAh 30C 3S LiPo 可以提供高達 66 安培的最大電流。
發射器和接收器:
發射器作為用戶的控制器工作。用戶只能使用此發射器操作四軸飛行器。它基于無線電通信。接收器安裝在無人機上,接收器帶有天線,在天線的幫助下,它與發射器進行通信。這是一個完全無線的通信。發射器向接收器發送信號,接收器將該信號發送到飛行控制器。我們在這里使用 FLYSKY 發射器和接收器。該發射器的射程為 1500 米,但如果我們在磁場干擾較高的地方使用該發射器,則發射器的射程會減小。您可以查看 有關 FLYSKY FS-i6 發射器和接收器的所有信息,以實現輕松的無人機控制 文章了解此發射器和接收器的所有功能。

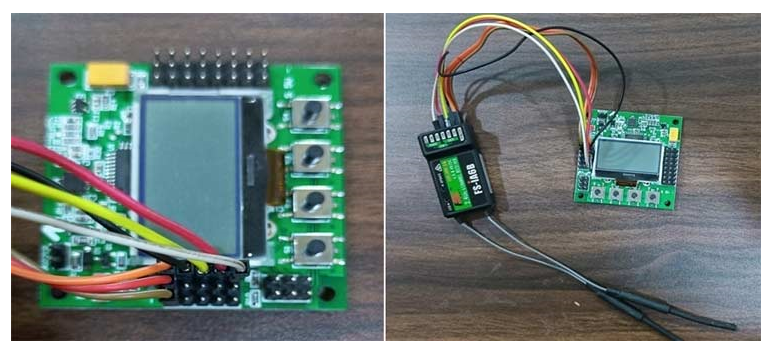
KK2.1.5 飛控
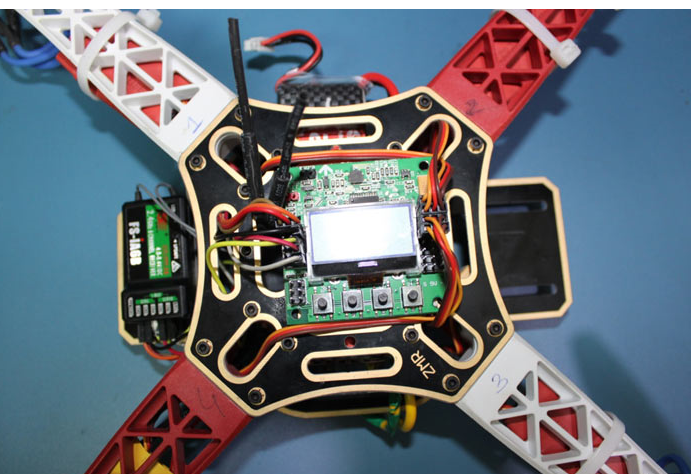
KK2.1.5為飛控;飛行控制器也被稱為無人機的大腦,因為它控制了無人機的所有操作。KK2.1.5內置了ATMEL mega 664PA IC。它是基于 8 位 AVR RISC 的微控制器,具有 64k 內存。它具有內置的加速度計和陀螺儀,6050 MPU和自動水平功能。板子右側有8個電機輸出,這里接電調。它有5個控制輸入;這些輸入通過接收器連接。它的中間還有一個 LCD 顯示屏,它將作為無人機的用戶界面。其工作電壓為 1.8V 至 5.5V,輸入電壓為 4.8-6.0 V。
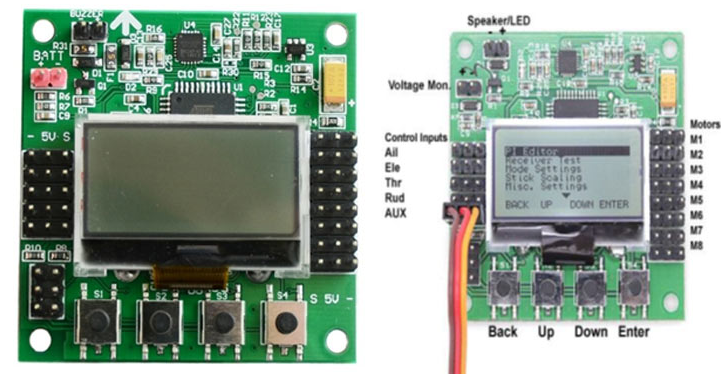
Kk2.1.5 用于在飛行過程中穩定四軸飛行器,為此,它接收來自陀螺儀的信號(滾動、俯仰和偏航)并將這些信號發送到處理器(ATMEL mega 664PA),然后將控制信號傳遞給 ESC 和這些信號的組合指示 ESC 對電機轉速進行微調,從而穩定飛行器。Kk2.1.5 還使用來自接收器的信號,并通過副翼、升降舵、油門和方向舵用戶需求輸入將這些所有信號一起傳遞給處理器 (ATMELmega664PA)。處理后,此信息將發送到 ESC,ESC 進而調整每個電機的旋轉速度以控制飛行方向(偏航、右、左、上、下、后、前)。在下面的視頻中,我們一一解釋了上述所有組件。
四軸飛行器的飛行控制力學
四軸飛行器的運動是通過改變 4 個電機中每個電機的相對推力來控制的。在這里,我們使用的是 X 形的四軸飛行器。在這個四軸飛行器中,位于同一對角線上的電機沿同一方向移動,順時針方向 (CW) 或逆時針方向 (CCW)。如果我們乘坐汽車,那么我們可以前、后、左或右,但是當我們談論飛行系統時,我們不會這么說。飛行系統有不同的術語,即。偏航、滾動和俯仰。
在了解四軸飛行器的飛行動力學之前,我們需要了解四軸飛行器角運動的三個主要參數,即偏航、橫滾和俯仰。
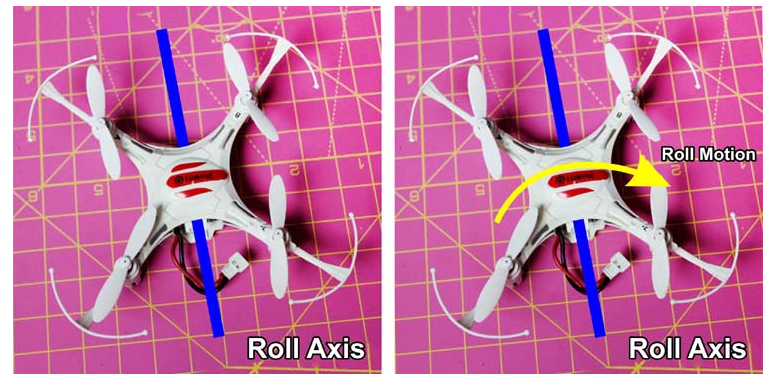
卷:
無人機后部到無人機前方的軸稱為角色軸,圍繞該軸的旋轉稱為角色運動。這種運動也稱為副翼。在下面給出的圖像中,我們可以看到滾動運動。
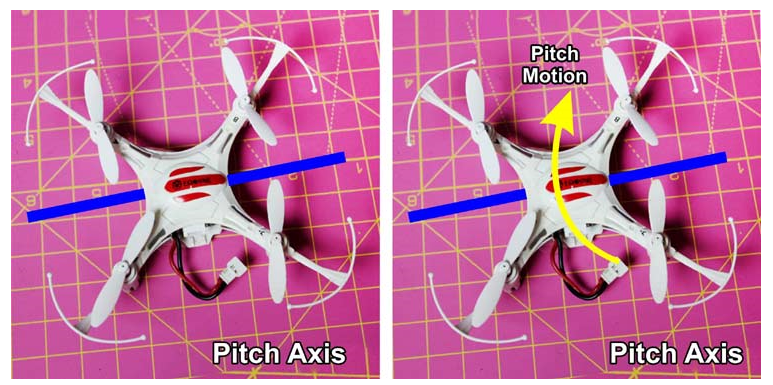
瀝青:
從無人機左側到無人機右側的軸稱為俯仰軸。繞該軸的旋轉稱為俯仰運動。它也被稱為電梯運動。在下面給出的圖像中,我們可以看到俯仰運動。
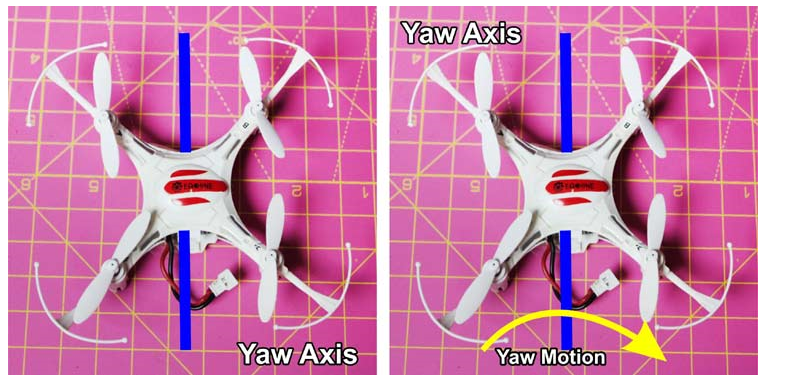
偏航:
從無人機頂部到無人機底部的軸稱為偏航軸。繞該軸的旋轉稱為偏航運動。它也被稱為船舵。在下面給出的圖像中,我們可以看到偏航運動。
借助下面給出的圖像,我們可以一起理解所有三個動作。
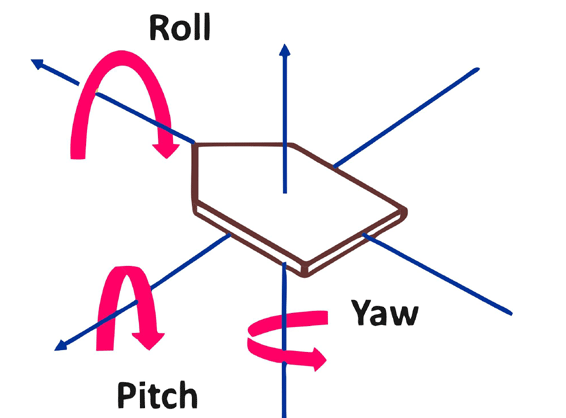
這些不是橫向運動本身,而是沿三個不同軸的旋轉。甚至橫向運動也是沿這些軸旋轉的結果。要了解無人機的控制,我們首先需要了解作用在無人機上的不同力。如果推力 = 重量 (mg),那么四軸飛行器將保持平衡。如果推力 》 重量 (mg) 則無人機將向上飛行,如果推力 《 重量 (mg) 則無人機將向下飛行。
向上時,推力的方向就是無人機運動的方向,所以要改變無人機的運動方向,我們需要改變推力的方向,這就是無人機運動的邏輯。
前后方向運動:
如果我們想向前移動無人機,我們需要產生向前的推力分量。這是通過增加稀有電機的功率和降低前置電機的功率來實現的。如果我們想使無人機向后移動,我們會降低稀有電機的功率并增加前電機的功率。
左右方向運動:
為了將無人機向左移動,我們生成向左方向的推力分量。這是通過增加右側電機的功率和降低左側電機的功率來實現的。要將無人機向右移動,我們增加左側電機的功率并降低右側電機的功率。
四軸飛行器的偏航運動:
對于偏航運動,事情會變得有點棘手,當我們想在 CW 方向上偏航無人機時,我們將增加逆時針螺旋槳的功率,由此產生的反作用扭矩將使無人機順時針方向偏航。如果我們想在 CCW 方向上偏航無人機,我們將增加順時針螺旋槳的功率,由此產生的反作用扭矩將使無人機逆時針方向偏航,因此為了控制四旋翼的運動,我們控制功率我們給它的馬達。
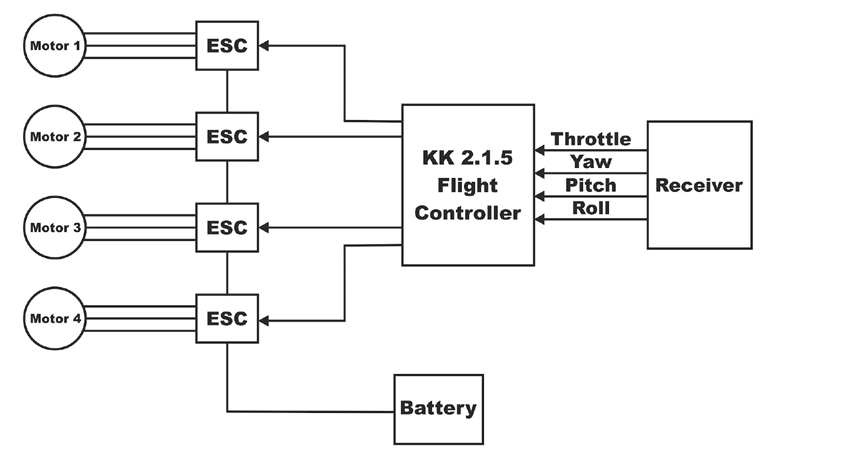
四軸飛行器框圖
正如我們在下面的框圖中看到的,所有電機都通過電調與KK2.1.5連接。加速度計和陀螺儀顯示在 KK2.1.5 板之外,但它內置在板本身內部。接收器直接與KK2.1.5板連接。在下圖中,我們展示了四軸飛行器的框圖
?
四軸飛行器的飛行動力學
要駕駛無人機,我們只有 4 種類型的輸入。這四個輸入是通過向電機提供或多或少的功率來控制的。
這里有 4 個電機,電機 1 和 3 沿 CW 方向旋轉,電機 2 和 4 沿 CCW 方向旋轉。? 1, ? 2 , ? 3, ? 4 分別是電機 1、電機 2、電機 3 和電機 4 的角速度。l 是對角相對的電機和 Z 軸垂直于表面的距離。
每個電機在 Z 方向提供向上的推力。
推力 α ? 2
推力 = K? 2
其中 K 是升力常數。
每個馬達在 Z 方向提供向上的推力。
Z方向的力(向上方向):
F z = K (? 1 2 + ? 2 2 + ? 3 2 + ? 4 2 )
X、Y、Z方向的扭矩:
T x = K * l * (? 4 2 - ? 2 2 )
T y = K * l * (? 3 2 - ? 1 2 )
T z = B * l * (? 1 2 - ? 2 2 + ? 3 2 - ? 4 2 )
其中 B 是阻力常數
F x 和 F y 呢?
在四軸飛行器中,我們可以完美地誘導旋轉運動。我們可以在 X、Y 和 Z 方向上產生扭矩,但我們只能在 Z 方向上產生力。我們不能直接誘導 F y 和 F z 。電機不能在 X、Y 方向產生力。
如果我們想沿 X 和 Y 方向移動四軸飛行器,那么我們需要將四軸飛行器繞 X 軸或 Y 軸旋轉一點角度,然后一個分力將沿 X、Y 和 Z 軸作用。 我們可以通過旋轉四軸飛行器間接誘導 X、Y 方向的運動。
因此,控制四軸飛行器有點復雜,因為我們不能直接在 X 和 Y 方向上運動,我們需要先引起旋轉,然后力將在 X 和 Y 方向上作用。
我們有控制變量或四個輸入
F z , T x , T y , T z
但是我們必須控制六個參數或六個輸出
X、Y、Z、θ(滾動)、?(俯仰)、ψ(偏航)
在使用倒矩陣方法進行變換時,我們得到,
? 1 2 = (1 / 4k) * F z – (1 / 2kl) * T y – (1 / 4b) * T z
? 2 2 = (1 / 4k) * F z – (1 / 2kl) * T x + (1 / 4b) * T z
? 3 2 = (1 / 4k) * F z + (1 / 2kl) * T x – (1 / 4b) * T z
? 4 2 = (1 / 4k) * F z + (1 / 2kl) * T x + (1 / 4b) * T z
KK2.1.5飛控設置與調試
Kk2.1.5多旋翼液晶飛控板基于ATML644 PA。電路板右側有 8 個輸出,我們將使用其中 4 個輸出直接連接 ESC。我們將使用四軸飛行器,所以我們只使用了四個輸出引腳。
ESC的連接:
輸出引腳每行有 3 個引腳。最右邊的所有引腳都接地。所有中心引腳均為 Vcc(5 伏)。所有第一次的引腳都是信號。將所有四個電調線連接到 KK2.1.5 板的前四個輸出引腳。電調與 KK2.1.5 板的連接如下表所示。

在下圖中,我們可以看到電調與 KK2.15 的連接。在這里,我們只連接了 1 臺電調,這樣我們將所有 4 臺電調都連接到 KK2.1.5 板。

接收器連接:
輸入引腳位于 LCD 顯示屏的左側。這里有 5 個連接,這些引腳將與 Receiver 連接。接收器引腳和 KK2.1.5 輸入引腳應按如下方式連接:

我們將接收器的第一個通道(CH1)用三根連接線連接,其余通道將僅通過單根線連接,因為其他通道無需連接 Vcc 和地。根據上表,接收端連接應如下圖所示。

根據上表,KK2.1.5 板端連接應如下圖所示。
BLDC 電機設置:
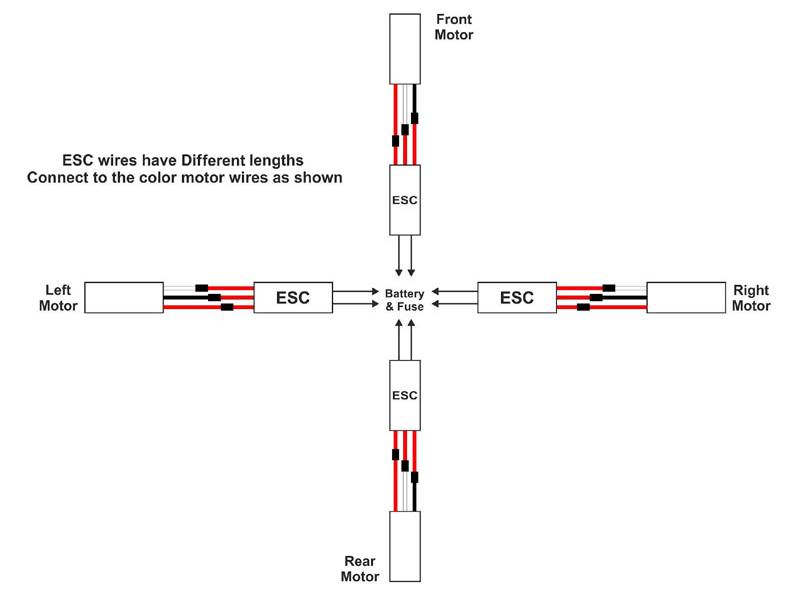
電機一和三應逆時針旋轉,電機二和三應逆時針旋轉。我們將使用飛天發射器設置所有電機的方向。首先將電池連接到電源連接器。我們將第一個電機 ESC 連接到接收器的通道 3,通道 3 總是被限制。現在,打開發射器并稍微移動油門,然后電機將旋轉。現在,觀察電機的方向。如果我們看到方向相反,我們將電機和ESC連接的端線反轉。現在,再次移動油門,我們可以看到電機正在向所需方向旋轉。現在,對每個電機重復相同的過程。電機和電調都有 3 根線,我們將如下圖所示連接電機和電調。
KK2.1.5 設置
設置 KK2.1.5 板時,首先保持發射器開啟,并確保接收器與發射器綁定。KK2.1.5板的底部有四個按鍵S1、S2、S3和S4。使用這些按鈕,我們將與 LCD 顯示屏進行交互。
步驟 1 首先按 S4 進入菜單,然后進入加載電機布局,然后選擇四軸飛行器 X 模式并在 X 模式下設置四軸飛行器。在此處檢查所有電機方向。

Step-2 接下來是 ACC 校準,為此我們必須將四軸飛行器放置在平面水平面上,并選擇用于校準加速度計的 Acc Calibration。點擊S4,這是自動校準。
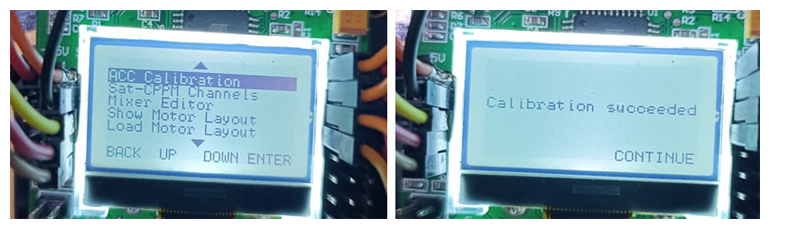
Acc校準結束后,我們就可以拔掉電源,重新供電。它將在 LCD 顯示屏上顯示安全,這意味著它已從錯誤變為安全。

步驟 3 現在,轉到 PI 編輯器。在這里,我們要設置副翼(Roll)、升降舵(Pitch)和方向舵(Yaw)的P(增益/限制)和I(增益/限制)。P增益是代表靈敏度和責任的比例增益。更高的 P 意味著更清晰的控制,更低的 P 意味著更柔和的控制。
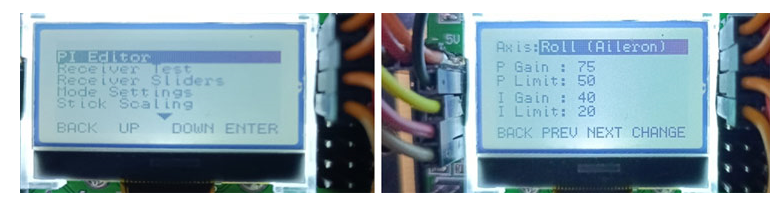
I 是積分增益,表示它保持高度的程度。完成 PI 設置后,進入模式設置。

Step-4 在模式設置中,將自身電平設置為AUX。

步驟 5 現在進入其他設置,在這里我們將設置警報 1/10 伏特。
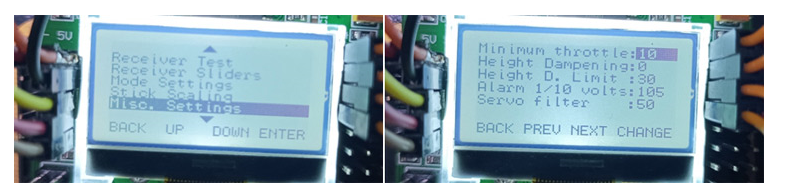
要將警報設置為 1/10 伏,我們需要進行以下計算。
11.1 伏的 3 芯鋰聚合物電池使用每個電池 3.60 伏的值來表示空電池,然后將值(以 1/10 為單位)設置為(3.6 * 3 * 10 = 108),當電源電壓降至 10.8 伏時警報會響起。
Step-6 現在,我們進行電調校準。首先將遙控器調到最小,然后將油門調到最大,按住S1和S4開關,然后將電池連接到四軸飛行器,現在我們會聽到兩聲嗶嗶聲,我們將油門放下,導致嗶嗶聲。 這樣,校準過程就結束了。
Step-7 為四旋翼布防,將油門保持在左側,一旦四旋翼布防,我們就可以飛行四旋翼了。
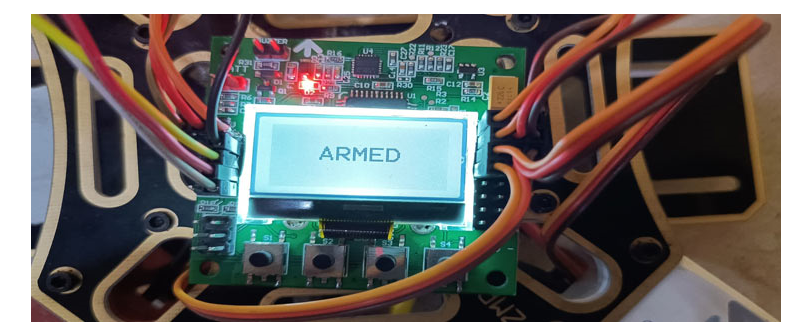
現在四軸飛行器已準備好飛行。將油門保持在右側。
四軸飛行器中的 PI 調優
極低的 P 增益:
四旋翼很難控制,四旋翼整體穩定性較差。當飛行器響應時,控制輸入感覺不精確且緩慢。當四旋翼飛行時,很容易過度糾正命令,飛行器會很緊張。
非常高的市盈率:
四軸飛行器會出現左右擺動。四軸飛行器很容易獲得或降低高度,但很難保持給定的高度。四軸飛行器會以低頻抖動和振蕩。
正確的 P 增益:
我們可以簡單地操作四軸飛行器,它會以穩定的方式飛行。它可以快速優雅地起飛,在一個地方盤旋。如果我們想飛四軸飛行器雜技,我們應該在穩定飛行值的基礎上稍微增加P設置,在穩定飛行值的基礎上稍微降低I設置;如果我們想要平緩平穩的飛行,我們應該在穩定飛行值的基礎上稍微降低 P 設置,在穩定飛行值的基礎上稍微增加 I 設置。
比例增益系數(Kp):
Kp對于相對穩定的飛行起著重要作用。Kp 確定來自陀螺儀的板載控制和用戶搖桿輸入之間的混合。在增加 Kp 值時,四軸飛行器將變得更加敏感,對角度變化有反應,并且可能會以高頻率振蕩。降低 Kp 值時,四軸飛行器將變得遲緩且難以保持穩定。
積分增益系數 (Kc)
Kc 增加了角位置的精度。例如,當飛行器受到風的干擾并且它的角度位置改變了 10 度時,理論上它會記住角度改變了多少,并會嘗試返回 10 度。它適用于不規則的風和來自電機的湍流。當 Kc 值較高時,四旋翼將開始有緩慢的反應,它會降低 Kp 的效果,但當 Kp 值設置為高時,四旋翼開始以較低的頻率振蕩。
在本教程中,我們在 KK2.1.5 飛控的幫助下設計了一個四軸飛行器。在這里,我們已經解釋了從設置控制器到調整控制器。在下一部分中,我們將解決一些問題,以使四軸飛行器平穩飛行。







 工商網監
工商網監
評論