 電子發(fā)燒友App
電子發(fā)燒友App


2019年,印度與巴基斯坦的一場空中戰(zhàn)斗引起了全世界的關注,雖然關于空戰(zhàn)結(jié)果雙方各執(zhí)一詞,但有一點可以確定的是,印方至少一架米格戰(zhàn)機被擊落,飛行員跳傘后被俘。
據(jù)擊落對方戰(zhàn)斗機的巴方飛行員哈桑稱,印度空軍的米格戰(zhàn)斗機編隊出現(xiàn)在梟龍戰(zhàn)斗機的雷達屏幕上之后,梟龍戰(zhàn)斗機憑借著超遠距離的雷達鎖定能力,便用霹靂-5空空導彈將其鎖定。印度飛行員在得知自己被鎖定之后,試圖做出規(guī)避動作并釋放干擾彈,然而在巴基斯坦的電子干擾之下米格戰(zhàn)斗機的座艙都已經(jīng)失靈。梟龍戰(zhàn)斗機一個橫滾之后便射出了導彈,印度飛行員只能眼睜睜的看著自己的座駕被導彈擊中,此時他們唯一能做的就是趕緊按下彈射按鈕逃生。
通過以上描述可以得知,利用本方戰(zhàn)機雷達鎖定對手是取得空戰(zhàn)勝利的關鍵所在,那么,戰(zhàn)斗機雷達是如何鎖定目標的?對方飛行員又是如何知道自己被鎖定的呢?
下面就由小編帶您對現(xiàn)代戰(zhàn)斗機的機載火控雷達系統(tǒng)作一個初步普及和解讀。
機載火控雷達誕生于第二次世界大戰(zhàn),到現(xiàn)在已經(jīng)走過了七十多年的歷程,它是現(xiàn)代戰(zhàn)斗機火控系統(tǒng)的關健設備之一。
1941年10月,美國輻射試驗室開始著手世界上第一部機載火控雷達的研制工作,并于1944年將其裝備在美國海軍戰(zhàn)斗機F-6F、F-7F上,這部雷達具有空-空上視搜索、測距和跟蹤等機載火控雷達的最基本功能。
二戰(zhàn)后,隨著航空電子技術的快速發(fā)展,機載火控雷達的功能和性能不斷得到提升,其作用越來越受到重視,但是早期的機載火控雷達在進行下視搜索時,會遇到很強的地面雜波而難以搜索到目標,作戰(zhàn)效能受到嚴重制約。對機載火控雷達下視功能的迫切需求催生了脈沖多普勒體制的機載火控雷達。
70年代初,第一部實用型機載脈沖多普勒火控雷達AWG-9由美國休斯公司研制成功,并裝備在美國海軍的F-14戰(zhàn)機上。隨后,機載脈沖多普照勒火控雷達得到迅速發(fā)展,幾乎成為先進戰(zhàn)斗機火控雷達的惟一選擇,是第三代戰(zhàn)斗機的重要指標之一,它使現(xiàn)代先進戰(zhàn)斗機真正具有了遠程、全天候、全方位和全高度攻擊能力。
20世紀90年代以來,在數(shù)字技術和微電子技術的推動下,對機載雷達多目標攻擊、抗干擾以及一體化等功能和性能的更高要求使得相控陣技術開始應用于機載火控雷達,又進一步促使了機載火控雷達更多功能的開發(fā),現(xiàn)代機載火控雷達的發(fā)展已經(jīng)步入了相控陣時代。
機載火控雷達功能從最初的只具有簡單的空-空搜索、測距和跟蹤等簡單功能開始,發(fā)展到了現(xiàn)在的空-空、空-地、空-海、導航等四大類共幾十種子功能(有些資料將空-地、空-海等功能統(tǒng)稱為空-面功能),所制導的武器由原來的機炮發(fā)展到各種導彈和精確制導炸彈,使戰(zhàn)斗機真正具有了遠程、全天候、全方位和全高度的攻擊能力。
空-空功能(A-A)
空-空功能是機載火控雷達的基本功能,主要針對的是各類空中目標,典型的目標是戰(zhàn)斗機、轟炸機、運輸機、無人機等以螺旋槳或噴氣發(fā)動機推進的飛機。隨著現(xiàn)代戰(zhàn)爭形式的不演化,先進的空-空功能已開始將懸翼直升機、巡航導彈、氣球或飛艇等威脅已方平臺或設施安全的新舊威脅都列入了搜索目標。
從空-空功能的作戰(zhàn)過程來看,一個完整的空-空任務至少包含搜索、截獲和跟蹤三種子功能,雖然有些雷達將截獲功能也列為一種專門方式,但是它本質(zhì)上是個過渡過程,雷達工作的主功能就是搜索和跟蹤,而這些功能又對應了不同的功能子模式。
搜索功能
1、邊搜索邊測距模式(RWS)
RWS功能主要用于對感興趣的空域范圍進行掃描搜索,此模式因其能對外提供目標的距離而得名,實際上RWS往往還提供目標的粗略方位角、俯仰角(高度)以及速度等信息。在RWS方式下飛行員可以干預控制的方位范圍、俯仰范圍(高度范圍)以及距離量程。
當搜索的目標高度高于本機時,習慣上稱上視搜索,反之稱下視搜索;當重點搜索的是迎頭目標時,又稱前半球搜索,反之稱后半球搜索。RWS模式往往還引伸出子模式的劃分,即所謂正常搜索和增程搜索,增程搜索主要用于飛機上有較為完善的自動引導系統(tǒng)(如數(shù)據(jù)鏈)的情況,此時由于雷達得到的目標引導信息相對準確,就可以自動設置較小的角度搜索范圍以利于盡早發(fā)現(xiàn)特定距離、特定高度和方位上的目標。
2、邊搜索邊跟蹤模式(TWS)
TWS模式是機載火控雷達空-空功能的另一主要工作方式,它的基本工作原理與RWS相同,但是掃描模式的選擇往往相對固定,飛行員可干預的選項相對較少。另外,當搜索過程中發(fā)現(xiàn)目標后,它還會自動建立起對數(shù)個目標(具體數(shù)量由指標規(guī)定)的跟蹤,并將其中最危險的兩個目標標志為高優(yōu)先級目標和次優(yōu)先級目標,對危險目標自動調(diào)整雷達天線掃描范圍,予以盡可能覆蓋,這時往往天線的掃描中心不能完全由飛行員控制,但是危險目標的排序選擇可以由人工干預改變。
需要指出的是,TWS模式下的“跟蹤”主要是指航跡連續(xù)更新,角度范圍內(nèi)自動覆蓋危險目標,但是這種“跟蹤”所提供的目標數(shù)據(jù)一般情況下精度偏低,往往構(gòu)不成武器發(fā)射的條件。
3、速度搜索模式(VS)
機載火控雷達采用高、中、低三種脈沖重復頻率波形,其中HPRF由于存在一段雜波清晰區(qū),非常利于高速迎頭目標的檢測,于是現(xiàn)代雷達大都設計了利用HPRF波形專門檢測高速迎頭目標的模式,但是此種模式與RWS不同,它不能提供目標的距離信息,故稱速度搜索模式。
VS模式由于不具備測距能力,因此使用上有諸多限制,一般主要用于遠距離高速目標的前期檢測,起“警示”的作用,它必須與其它工作模式配合才能最后完成武器攻擊的制導任務,隨著相控陣雷達的出現(xiàn),此種模式有可能最終會變?yōu)槔走_的一個處理過程,而不是一個可供飛行員使用的模式。
4、空戰(zhàn)格斗模式(ACM)
顧名思義,ACM主要用于近距離空戰(zhàn)格斗,此時作戰(zhàn)雙方距離很近并且伴隨較大的機動動作,誰掌握先機,誰就贏得勝利。因此,為適應近距離交戰(zhàn)這一特點,ACM相對于RWS和TWS模式的主要區(qū)別有以下幾點:一是虛警率要求嚴格,一般高于常規(guī)搜索數(shù)倍以上,相應不太強調(diào)遠距離;二是要求對一定距離上的目標自動截獲,且截獲速度要快;三是掃描圖形甚至掃描速度有嚴格限制;四是在近距離格斗時,載機和目標機的相對機動大幅度提高,要求雷達在保證一定數(shù)據(jù)精度的要求下仍然保持穩(wěn)定跟蹤。
跟蹤功能
跟蹤功能發(fā)揮作用的前提是雷達在搜索階段發(fā)現(xiàn)目標,并成功進行目標截獲,跟蹤功能的子模式劃分一般與雷達能同時跟蹤目標的個數(shù)有關。
1、單目標跟蹤模式(STT)
STT是機載火控雷達空-空方式的一種常用工作狀態(tài),在此狀態(tài)下,雷達自動控制天線保持對空中目標的持續(xù)或基本持續(xù)的定點照射,同時向武器系統(tǒng)提供精確的目標參數(shù),這些數(shù)據(jù)較為精確地反映作戰(zhàn)目標在空中的相對或絕對坐標,以及目標相對于本機的有關運動趨勢信息。
2、雙目標跟蹤模式(DTT)
DTT模式的出現(xiàn)為飛行員同時攻擊兩個目標提供了可能,在這種模式下,雷達能保持對兩個空中目標的同時跟蹤,一般情況下天線的運動模式為“點到點”。實際上DTT可以看成兩個STT目標對雷達資源的時分復用(不同時段傳輸不同信號)。
3、多目標跟蹤模式(MTT)
由于現(xiàn)代雷達的技術水平日益增長,特別是高速處理技術和相控陣技術的引入,使得火控雷達的設計人員已不再滿足于同時對兩個目標的跟蹤,開始研制具有MTT功能的雷達,為飛行員同時攻擊兩個以上的目標提供了可能,至少有利于飛行員掌握空中態(tài)勢并隨時切換攻擊對象。
4、跟蹤加搜索功能
即雷達在跟蹤一個或數(shù)個目標的同時還能保持對特定空域的搜索,它是跟蹤功能與搜索功能的結(jié)合,顯然對于作戰(zhàn)使用有著無可比擬的優(yōu)越性,但是它對雷達自動處理能力的要求極高,一般更多見于新開發(fā)的相控陣雷達。
空-地功能(A/G)
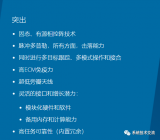
加強對地面目標的精確打擊能力是現(xiàn)代戰(zhàn)斗機火控雷達大力持續(xù)開發(fā)的功能之一,機載火控雷達對地功能包括成像、固定目標及動目標檢測跟蹤、成像疊加動目標等子功能模式。
成像功能
1、真實波束地圖模式(RBM)
這種模式直接用雷達接收到的回波強度數(shù)據(jù)來繪制地面的無線電對比圖,方位分辨率接近于實際的雷達波束寬度,因此而得名。RBM是最簡單最原始的識別地面目標、地形地貌和導航的雷達手段。當飛行員選擇對某一成像區(qū)域進行擴展時,就引出了地圖擴展子模式,它可以放大顯示RBM的局部;當飛行員需要凍結(jié)成像畫面時,就引出了地圖凍結(jié)子模式,此時畫面凍結(jié),載機運動軌跡在地圖畫面上更新。
2、多普勒波束銳化模式(DBS)
根據(jù)波束內(nèi)不同角度地塊產(chǎn)生不同的多普勒頻率的基本原理,將真實波束的角度進一步細分(即所謂銳化),從而可以獲得更高分辨率的地圖,用來準確地確認地面導航標志和分辯地面目標,作為一種輔助導航及對地精確打擊的重要手段。相應DBS的主要衡量指標為“銳化比”。
3、合成孔徑模式(SAR)
利用載機的平臺運動,通過先進的信號處理技術來合成等效長的天線孔徑,從而得到更高分辨率的地圖,現(xiàn)代先進火控雷達已能做到約0.5~5米的分辨率。
檢測跟蹤功能
1、空-地測斜距模式(AGR)
雷達波束根據(jù)飛行員控制指向地面特定區(qū)域,自動測出載機到地面指向的斜距,為攻擊地面目標提供數(shù)據(jù)。
2、固定目標跟蹤模式(FTT)
這種方式可以用游標在RBM和DBS形成的地圖上手動選擇位置已知的固定目標進行跟蹤。當跟蹤實施后,游標固定在被跟蹤目標上,不可再移動,目標位于游標十字叉中心。一旦目標被探測到發(fā)生移動,或在背景中不再顯著可識別,雷達自動放棄目標。如果此時實施“凍結(jié)”,雷達發(fā)射機停止發(fā)射,目標位置保持不變,同時進行載機的運動補償。當從“凍結(jié)”狀態(tài)退出時,雷達返回搜索模式。
3、地面運動目標指示跟蹤模式
雷達檢測地面上有一定運動速度的目標,主要用于指示各類交通運輸工具。當對目標進行截獲操作后,即轉(zhuǎn)入地面運動目標跟蹤。
4、成像疊加動目標模式
成像疊加動目標模式,簡單地說就是在成像畫面上疊加顯示地面運動指示符號。最典型的工作模式為合成孔徑模式,疊加地面動目標顯示,在SAR地圖背景上。
空-海功能(A/S)
對機載火控雷達而言,空-海功能基本類似于部分空-地功能,只是所檢測的背景特指海面而已。
1、海I方式(SEAI)
在海浪低于0.91m時(三級以下海情),雷達工作在海I方式,用來檢測海面上的運動目標,類似空-地功能的RBM模式。
2、海Ⅱ方式(SEAII)
在海浪大于三級海情時,為檢測海上有一定運動速度的目標,雷達工作于海Ⅱ方式,系統(tǒng)大都采用脈沖多普勒技術,類似于DBS模式。
導航功能(NAV)
實際上所有成像模式都兼有導航的功能,此處不再重復描述。
1、信標模式(BCN)
機載火控雷達工作在信標方式時,雷達發(fā)射特定頻率的信標詢問信號,與地面的信標臺聯(lián)系,地面信標臺收到詢問信號后,自動發(fā)射另一特定頻率的信號,雷達收到信標臺的回波信號后,經(jīng)過解碼將信標臺的方位和距離以PPI格式顯示,為飛行員飛行或?qū)Φ孛婺繕宿Z炸提供必要的數(shù)據(jù)和引導。
2、載機測速模式
雷達天線在俯仰上進行掃描,根據(jù)來自地面不同點回波的多普勒信息來測量載機的精確對地速度,這一方式在載機速度出現(xiàn)異常的情況下使用,一般情況下不用。
3、地形跟隨模式(TF)
地形跟隨是載機沿地表縱向曲線(地形縱向輪廓線)的航線飛行,雷達隨著天線在俯仰上的掃描進行空一地測距,描畫出地球的剖面輪廓圖。通常將地形跟隨和自動駕駛儀相結(jié)合,為飛行員提供地形信息,做出“繞過”或“通過”的選擇。
4、地形回避模式(TA)
地形回避指的是貼近地面飛行的能力,通常在低空作戰(zhàn)和低空空防時使用,飛行員根據(jù)地面標志,充分利用地形條件掩護自己,避開地形障礙,避開敵方防空火力網(wǎng)的攻擊,突然接近敵方軍事目標,實施有效的對敵攻擊。
5、氣象回避(WA)
雷達通過探測前方航路上的氣象回波來提示飛行員選擇安全性的航線,避開惡劣天氣區(qū)域。
戰(zhàn)斗機是如何
知道自己被火控雷達鎖定的?
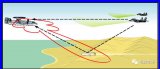
戰(zhàn)斗機或者防空系統(tǒng)的雷達在鎖定目標時,會連續(xù)的向目標發(fā)射一定模式的無線電波,從而連續(xù)不斷的獲得目標的方位距離速度。這令戰(zhàn)斗機或防空系統(tǒng)能夠進而發(fā)起攻擊。
這一無線電波作用模式,與搜索狀態(tài)有明顯的區(qū)別,例如搜索時無法連續(xù)不斷的向一個目標發(fā)射無線電波,需要間隔一段時間才能掃描一次,以實現(xiàn)覆蓋全視角的搜索能力。要知道自己被對方雷達鎖定,首先需要能夠分辨出相關無線電特征。而得到對方雷達鎖定信號特征的方法,主要依靠平時偵察獲得對方的鎖定信號,進行記錄分析,然后存儲到己方戰(zhàn)斗機電子告警系統(tǒng)之中。這樣,在戰(zhàn)時可以根據(jù)對方雷達發(fā)射來的無線電波特征,判斷對方工作狀態(tài),確定自身是不是已經(jīng)被雷達鎖定。甚至能精確到知道具體是哪一種雷達在用哪一種模式進行探測。
具體的探測設備,包括了戰(zhàn)斗機自身的雷達告警設備,以及外掛的電子戰(zhàn)吊艙等等,以及伴隨己方戰(zhàn)機飛行、實施保護的專用電子戰(zhàn)飛機。一旦發(fā)現(xiàn)威脅較大的敵方雷達信號,例如戰(zhàn)斗機火控雷達鎖定的信息,相關設備就會向飛行員告警。如果無法識別出特定的信號,那么就需要根據(jù)既定的策略,按照已經(jīng)規(guī)劃好的算法和邏輯,進行對這一信號的初步判斷,進而向飛行員提供相關決策信息。
飛行員或者戰(zhàn)機自動化電子戰(zhàn)自衛(wèi)設備,能夠根據(jù)獲得的信息,做出如何進行自衛(wèi)的決策,包括了規(guī)避、投放干擾彈、實施電子干擾、召喚專用電子戰(zhàn)飛機進行干擾或者打擊等措施。
為適應戰(zhàn)爭的需要,機載火控雷達的多功能發(fā)展趨勢從它誕生之日起就沒有停止,在可以預見的未來,機載火控雷達作為先進戰(zhàn)斗機的關健傳感器的地位不會動搖,因此這種多功能發(fā)展的趨勢也必將繼續(xù),但是隨著作戰(zhàn)觀念的更新、作戰(zhàn)體系的變革,機載火控雷達的多功能發(fā)展也將呈現(xiàn)更鮮明的高技術特色。
審核編輯:黃飛
?















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論