要實現(xiàn)飛行器的自主飛行,一般由地面站或APP給飛控發(fā)送目標位置的經(jīng)緯度,那如何讓飛行器飛到指定點呢?
2020-07-12 11:32:41 5505
5505 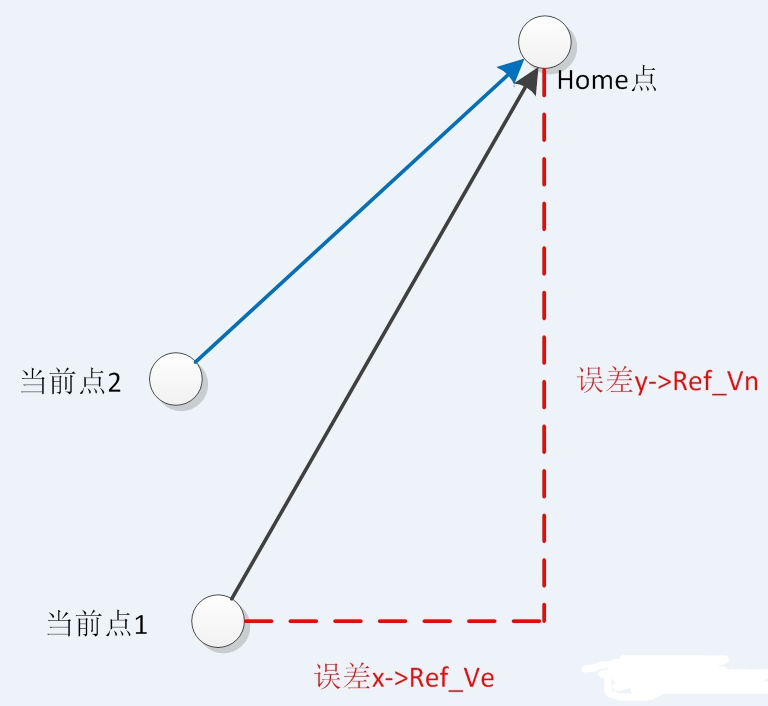
(手機設(shè)計全集)公司內(nèi)部設(shè)計資料資料來自網(wǎng)絡(luò)資源分享
2021-02-15 21:55:38
一、任務(wù)設(shè)計并制作四旋翼自主飛行器探測跟蹤系統(tǒng),包括設(shè)計制作一架四旋翼自主飛行器,飛行器上安裝一向下的激光筆;制作一輛可遙控小車作為信標。飛行器飛行和小車運行區(qū)域俯視圖和立體圖分別如圖 1 和圖 2
2021-07-23 08:46:54
,用圖像處理技術(shù)結(jié)合控制技術(shù)來實現(xiàn)無人機自主飛行。準備階段準備階段做的是2015年的題,2015年的題是主要是尋線。(1)直線效果圖 (2)十字效果2.競賽階段 2017年的題相較前兩屆,簡單了許多
2017-09-05 14:47:01
JD招聘IC設(shè)計工程師 3年以上Mix-signal IC設(shè)計工作經(jīng)驗;具備傳感器后續(xù)處理電路(調(diào)壓/放大/比較)、SPI、I2C等接口IC電路的項目經(jīng)驗為佳,央企創(chuàng)業(yè)平臺,股權(quán)激勵可談。工作內(nèi)容
2016-03-27 18:28:20
自主飛行空中機器人設(shè)計方案
2013-09-26 13:29:52
交通道路,或者是讓汽車擁有“飛天”的本領(lǐng)!隨著科技飛速發(fā)展,新事物出現(xiàn)的速度,遠遠超出你的想象。在人群將目光集中在無人駕駛汽車的同時,飛行汽車已悄然興起。無人駕駛飛行概念車從設(shè)計上可以看出這是一輛沒有
2018-09-18 10:49:26
Keysight Aerospace Defense組件/子系統(tǒng)測試平臺產(chǎn)品概述
2019-10-22 14:47:30
OTA的概念是什么?如何實現(xiàn)OTA?OTA的開發(fā)流程是怎樣進行的?
2021-07-19 09:31:54
規(guī)劃和運動控制 運動規(guī)劃是一個很大的概念,從機械臂的運動、飛行器的飛行,到掃地機的清掃,機器人的移動,其實這些都是屬于運動規(guī)劃的范疇。 運動規(guī)劃主要分為:全局規(guī)劃、局部規(guī)劃。 全局規(guī)劃 全局規(guī)劃
2018-08-24 16:56:24
,全日制碩士及以上學(xué)歷;2、5年以上模擬IC設(shè)計工作經(jīng)驗;3、需具有ADC,DAC豐富流片經(jīng)驗;4、具有扎實的模擬電路基礎(chǔ),精通OPA,Bandgap,LDO等基礎(chǔ)模塊設(shè)計;熟練掌握Virtuoso
2020-07-02 14:14:59
作品介紹四軸飛行器作為低空低成本的遙控平臺,在各個領(lǐng)域應(yīng)用廣泛相比其他類型的飛行器。本設(shè)計四旋翼自主飛行器以TI公司生產(chǎn)的MSP430F5529微控制器為核心控制單元,使用InvenSense 公司生產(chǎn)
2014-12-30 15:26:11
搭建,完成報告;動手實踐,根據(jù)仿真系統(tǒng)的設(shè)計,完成四旋翼飛行器的制作,并進行四旋翼飛行器性能的測試。(報告+仿真驗證系統(tǒng)+實物及測試結(jié)果)考核指標:實現(xiàn)四旋翼飛行器的PID控制,通過對飛行器工作模式
2018-10-24 17:24:21
想通過stm32來控制四旋翼飛行器來完成各種姿態(tài)以及遙控和自主飛行兩種模式!
2015-05-12 11:36:12
申請理由:1.四旋翼飛控帶導(dǎo)航的飛控需要在系統(tǒng)中運行2.A8處理器的處理性能優(yōu)異,適合運行做嵌入式飛控開發(fā)項目描述:本課題的研究工作依托于“綜合系統(tǒng)頂層設(shè)計與數(shù)字仿真軟件包”項目,以某小型無人機飛行
2015-07-15 16:02:45
申請理由:想利用貴公司的開發(fā)板做圖像和視頻處理算法的開發(fā)項目描述:研究生期間的一個課題項目,就是通過攝像頭采集外界的信息,想利用貴公司的開發(fā)板做一些視頻和圖像的處理算法的開發(fā),并將此算法用在無人機上 進而實現(xiàn)無人機的自主起降。
2015-09-10 11:15:17
,基于標識的跟蹤等相關(guān)技術(shù)有過深入的學(xué)習(xí)和探索,尤其對圖像識別算法和自主跟蹤方向有極大的興趣和熱情。想借助發(fā)燒友論壇和Toybrick RK3399Pro平臺實現(xiàn)一款無人機自主目標跟蹤的飛行控制系統(tǒng)
2019-07-03 10:47:45
申請理由:本人現(xiàn)在是在準備做畢業(yè)設(shè)計,想做一個帶視頻傳輸?shù)?b class="flag-6" style="color: red">飛行器,因為之前做過一個帶視頻傳輸?shù)臋C器人,使用openwrt來實現(xiàn)的,效果挺好的,所以這次還想用openwrt來實現(xiàn),但是之前用的硬件平臺
2015-10-13 14:08:02
確認…… …… 6、試產(chǎn)階段試產(chǎn)跟線問題記錄問題分類和反饋評估和改版建議量產(chǎn)轉(zhuǎn)移…… 關(guān)于“DFM可制造性分析工作理念及工作流程”大概就這些,希望能對您有所幫助。而目前主流的完全自主的DFM軟件
2021-08-11 17:52:10
本帖最后由 wangjiamin2014 于 2015-1-9 10:10 編輯
項目名稱:可航拍可穿戴微型飛行器團隊名稱:飛翔的夢團隊成員:李鐵成作品演示作品介紹本作品是將可穿戴產(chǎn)品與拍照
2014-12-31 11:30:44
以色列開發(fā)了垂直起降飛行器AirMule,它是一架由以色列公司Urban Aeronautics自主開發(fā)的無人機,計劃明年完成任務(wù)展示。近期,它完成了幾項自動飛行測試,包括起飛、定位飛行、返航等任務(wù)
2014-03-28 16:54:32
本帖最后由 1563661808 于 2014-4-8 10:35 編輯
現(xiàn)在我們有一個可以飛行的四軸飛行器,我們想做成有這么一些功能:讓四軸飛行器感應(yīng)到人體,然后用GPS定位,返回數(shù)據(jù),然后自主飛行,跟蹤那個人,如果可以,加上人臉識別。難度有多大呢??都是基于STM32芯片。
2014-03-29 17:55:35
(FuSa)層,其中包括安全協(xié)處理器與可信的輸入/輸出控制器,兩者協(xié)同工作來保護系統(tǒng)。單片機(MCU)為實現(xiàn)這些安全協(xié)處理器提供了低成本的解決方案,是當(dāng)今新一代自主系統(tǒng)的核心。自主安全功能和規(guī)范安全協(xié)
2023-03-29 15:09:30
本系統(tǒng)由數(shù)據(jù)信息采集、數(shù)據(jù)信號處理、飛行姿態(tài)穩(wěn)定和航向控制部分組成。系統(tǒng)選用瑞薩RX23TMCU單片機作為主控芯片,以STM32F103VET6為核心的飛控完成飛機自穩(wěn),通過超聲波傳感器來檢測飛行
2021-09-02 09:01:26
、人工智能、嵌入式、Linux、Unix、QT、物聯(lián)網(wǎng)、算法導(dǎo)論、大數(shù)據(jù)等資料電子設(shè)計大賽資料分享:https://pan.baidu.com/s/14qxwGv7Sq6a_jcMT3mNwtw#list/path=%2F提取碼:jdxj四旋翼自主飛行器探測跟蹤系統(tǒng)1 系統(tǒng)方案1.1 控制系統(tǒng)的選擇1.
2021-09-02 09:11:24
;電機直徑3ram,重量325mg。目前已經(jīng)完成了試驗樣機在一竿臂上的離地起飛,進一步的工作仍在繼續(xù),最終目標是實現(xiàn)自主飛行和多飛行器協(xié)同完成具體任務(wù)三.課題研究的科學(xué)意義與發(fā)展前景飛行控制問題是微小
2013-11-28 09:29:12
的特點,因而外圍電路結(jié)構(gòu)簡單。無刷直流電機采用軟件啟動和PWM速度控制的方式,實現(xiàn)電機的啟動和穩(wěn)定運行,大大提高四軸飛行器無刷直流電機的調(diào)速和控制性能。 1 三相六臂全橋驅(qū)動電路 無刷直流電機驅(qū)動
2018-10-08 15:13:09
法寶,尤其是飛行機器人技術(shù)。因具有靈活、重量輕、以及可深入危險區(qū)域工作等優(yōu)勢,搜索飛行器在災(zāi)后救援工作中起著越來越重要的作用,此類飛行器需要具備穩(wěn)定的運動控制、采集多種環(huán)境信息、以及無線控制等功能
2016-01-07 16:34:53
現(xiàn)在我們有一個可以飛行的四軸飛行器,我們想做成有這么一些功能:讓四軸飛行器感應(yīng)到人體,然后用GPS定位,返回數(shù)據(jù),然后自主飛行,跟蹤那個人,如果可以,加上人臉識別。難度有多大呢??都是基于STM32芯片。
2019-04-19 06:36:22
現(xiàn)在有一個基于STM32芯片可以飛行的四軸飛行器,我們想做成有這么一些功能:1、讓四軸飛行器感應(yīng)到人體,然后用GPS定位,返回數(shù)據(jù),然后自主飛行,跟蹤那個人,2、如果可以,加上車牌識別,人臉識別。難度有多大啊??可以實現(xiàn)嗎?
2014-04-01 09:06:33
多旋翼自主飛行器(C題)
2015-08-12 07:57:05
本帖最后由 *** 于 2015-8-12 08:47 編輯
多旋翼自主飛行器(C題)超有用論文
2015-08-12 08:41:45
四旋翼自主飛行器是由哪些模塊組成的?如何去實現(xiàn)一種四旋翼自主飛行器的設(shè)計呢?
2021-11-12 06:20:09
四旋翼的工作原理是什么?四旋翼飛行器是由哪些部分組成的?如何去實現(xiàn)一種四旋翼飛行器的設(shè)計呢?
2021-11-11 08:01:28
記錄儀可精確監(jiān)視剩余電量,并在整個電池使用期全程保護鋰離子電池。設(shè)計人員可以借助無人機BMS參考設(shè)計為任何現(xiàn)有的無人機設(shè)計添加測量、保護、平衡和充電功能,并延長飛行時間。該設(shè)計還具有電池充電控制器和高效
2019-03-26 06:45:11
希望能通過努力實現(xiàn)用語音控制的四軸飛行器,并且使其能具有一定自主飛行的能力。
2013-11-09 17:26:11
那么順。此前一天,劉若鵬在接受記者群訪時是意氣風(fēng)發(fā)的。記者們針對光啟高精尖項目中最容易看明白的馬丁飛行包提了很多問題,劉對答如流。總結(jié)起來,最關(guān)鍵的信息有4點:光啟2014年收購新西蘭的馬丁飛行包公司
2015-11-10 16:10:27
本人小白,哪位大神能給提供一個四軸自主飛行的設(shè)計思路??
2015-07-23 10:58:04
本人希望以后從事電路板設(shè)計工作,希望各位有什么學(xué)習(xí)資料適合初學(xué)者的提供下,非常感謝
2012-11-22 16:33:46
我是www.eepeople.com 獵頭顧問Nicole Li。www.eepeople.com 是面向電子/電氣工程行業(yè)人員的人脈社交網(wǎng)站。現(xiàn)在聯(lián)想移動通信科技有限公司急招一名交互設(shè)計工
2012-09-29 22:06:41
本帖最后由 weimi 于 2012-7-12 13:31 編輯
美資安防公司招聘如下職位:薪資范圍:12~20K工作地點:北京 上地 聯(lián)系方式:E-mail
2012-06-26 10:20:28
高級模擬IC設(shè)計工程師JD 崗位職責(zé) 1、負責(zé)集成電路中模擬電路子電路模塊的原理圖設(shè)計與仿真; 2、指導(dǎo)版圖工程師進行FLOOR-PLAN;3、配合其他工程師進行測試、調(diào)試等工作;4、完成相關(guān)技術(shù)
2017-02-17 12:25:08
一、任務(wù)設(shè)計并制作四旋翼自主飛行器探測跟蹤系統(tǒng),包括設(shè)計制作一架四旋翼自主飛行器,飛行器上安裝一向下的激光筆;制作一輛可遙控小車作為信標。飛行器飛行和小車運行區(qū)域俯視圖和立體圖分別如圖 1 和圖 2
2021-07-27 06:11:26
飛行器怎樣修改程序實現(xiàn)一鍵懸、浮打圈轉(zhuǎn)、水平飛行,需要修改那部分程序,怎樣修改?
2019-05-16 04:26:50
今年多旋翼自主飛行器的題目是否允許使用openmv或pixy這樣的攝像頭模塊有人知道嗎?還有就是是否允許使用光流傳感器?
2018-07-23 04:34:39
如何實現(xiàn)單芯片手機設(shè)計?對硅片功能的劃分方法有幾種?
2021-04-12 06:35:08
最近要學(xué)做一個自主飛行器,題目如圖:飛行器是現(xiàn)成的,飛控板是用STM32F4系列芯片。由于從未涉及過四旋翼和ARM芯片,一時不知從何下手。求各位大神指點,該從哪里開始學(xué)。
2019-04-02 06:36:19
要求可以一鍵自主起飛,能夠巡線,能夠自主降落。請問有什么方案嗎?目前想到的是openmv+32+飛控。有人有做過相關(guān)的內(nèi)容嗎?關(guān)于控制應(yīng)該模擬哪部分的信號,比較好用點。
2019-06-14 03:36:00
給大家分享一個我在電路城看到一個四軸飛行器的方案。 開源無人機設(shè)計資料。Crazepony項目旨在為大學(xué)生/航模愛好者/創(chuàng)客提供可二次開發(fā)的迷你四軸飛行器原型。 我們秉承開放, 合作, 分享的理念
2016-07-28 10:27:38
沒有真正在大型直升機設(shè)計中被采用。這里四旋翼飛行器重新考慮采用這種結(jié)構(gòu)形式,主要是因為總距控制和周期變距控制雖然設(shè)計精巧,控制靈活,但其復(fù)雜的機械結(jié)構(gòu)卻使它無法再小型四旋翼飛行器設(shè)計中應(yīng)用。另外,四旋翼
2016-08-06 15:19:13
飛艇因其獨特的飛行性能和良好的效費比得到了廣泛的關(guān)注,是極具發(fā)展前景的一種飛行器。本文首先簡要敘述了飛艇的優(yōu)點、國內(nèi)外發(fā)展現(xiàn)狀以及飛艇結(jié)構(gòu)與工作原理,再重
2009-07-30 09:43:01 19
19 戰(zhàn)術(shù)決策是無人機任務(wù)規(guī)劃的重要內(nèi)容,將多Agent引入UCAV群空戰(zhàn)戰(zhàn)術(shù)決策系統(tǒng),提出了戰(zhàn)術(shù)決策系統(tǒng)的概念以及其功能,建立了一個基于多Agent的UCAV群空戰(zhàn)戰(zhàn)術(shù)掘策系統(tǒng)體系結(jié)構(gòu)
2009-08-11 08:13:5417 自主飛行機器人系統(tǒng)是以微型直升機模型為載體的復(fù)雜系統(tǒng)。在該系統(tǒng)中導(dǎo)航系統(tǒng)采集各傳感器數(shù)據(jù)得到機器人當(dāng)前飛行姿態(tài)、空間位置以及相應(yīng)的監(jiān)控信息,控制模塊依此監(jiān)控信
2009-08-29 11:50:4220 血壓計,電子血壓計工作原理圖和設(shè)計方案,多種方案可供參考。
2015-11-24 16:44:180 一篇關(guān)于微型四旋翼飛行器的設(shè)計技巧,簡單介紹了四旋翼的功能實現(xiàn)以及飛行原理。
2016-03-29 14:20:0653 /G13MCU板,啟動飛行器和CMOS攝像模塊,RL78/G13MCU飛控模塊矯正飛行器在空中的姿態(tài),實現(xiàn)懸停 前進后退等功能,CMOS模塊將拍攝的視頻內(nèi)容存儲在STM32模塊內(nèi)置的SD卡里。當(dāng)飛行到目的地。
2016-05-06 11:29:3110 濾波在飛行器姿態(tài)獲取系統(tǒng)中的實現(xiàn)濾波在飛行器姿態(tài)獲取系統(tǒng)中的實現(xiàn)濾波在飛行器姿態(tài)獲取系統(tǒng)中的實現(xiàn)
2016-06-08 17:29:360 瑞薩R5F100LEA單片機主控的四旋翼無人自主飛行器設(shè)計,其中包括四旋翼飛行器的器件使用,源代碼等
2016-08-22 16:01:48141 近日,Airbus展示了自己設(shè)計的垂直起降(VTOL)電動自主飛機。該項目車輛稱為“Vahana”,該公司目標在2017年底之前完成全尺寸原型的飛行工作,到2020年開始生產(chǎn)。
2016-11-03 16:07:41725 環(huán)境中執(zhí)行各類任務(wù),必然面臨著來自自主控制的巨大挑戰(zhàn)。先進飛行控制和導(dǎo)航技術(shù)作為最主要的支撐技術(shù),目前只能適應(yīng)相對結(jié)構(gòu)化任務(wù)環(huán)境的要求,而距解決動態(tài)。不確定環(huán)境下的自主飛行控制問題尚有很大的差距,本文在分析無人機自主控制的概念和研究現(xiàn)狀的基礎(chǔ)上
2017-10-13 15:24:387 為實現(xiàn)四旋翼精確高效的自主飛行,提出一種基于磁傳感器的串級PID控制自主飛行系統(tǒng)。該系統(tǒng)硬件平臺采用CPS接收機提供經(jīng)、緯度,磁傳感器提供航向角;軟件上采用串級PID控制,外環(huán)為位置導(dǎo)航級,內(nèi)環(huán)
2017-11-02 15:47:230 針對四旋翼飛行器,設(shè)計并實現(xiàn)了一種基于 STM32 的微型飛行控制器. 以新型 ARM Cortex-M3 內(nèi)核微處理器 STM32 作為計算控制單元,對飛行控制器進行了模塊化設(shè)計,包括主控、慣性
2017-12-05 10:52:4733 本文主要介紹了基于STM32的四旋翼飛行姿態(tài)串級控制的設(shè)計與實現(xiàn),行器控制器通過處理微型MEMS慣性器件和三維地磁傳感器采集的數(shù)據(jù),計算飛行器的姿態(tài)角,并根據(jù)飛行指令,結(jié)合相應(yīng)的控制律給出適當(dāng)?shù)目刂菩盘枺刂?b class="flag-6" style="color: red">飛行器姿態(tài)和位置。能夠實現(xiàn)飛行姿態(tài)的穩(wěn)定控制,達到了設(shè)計的目的。
2017-12-23 15:24:367254 
最近發(fā)現(xiàn)了一家叫Akka科技公司的創(chuàng)客企業(yè),發(fā)明了一種激進的全新“飛行列車”概念,有可能徹底顛覆我們對于航空旅行的了解!它展示了一款叫“Link & Fly”的飛機設(shè)計,這種模塊化飛機借助一種乘客艙和可拆分的機翼來加速登機過程,也使人們前往機場和離開機場的方式更加簡單。
2018-07-21 09:35:553616 雖然無人機蜂群已經(jīng)通過電腦模型展示過很多次了,但是匈牙利科學(xué)院的科學(xué)家最近首次在現(xiàn)實世界不借助中央控制系統(tǒng)實現(xiàn)了無人機蜂群的自主飛行。這一成功為將無人機蜂群運用于多種應(yīng)用指明了前進方向。
2018-08-02 11:13:052379 據(jù)外媒報道,英國推出了首個飛行的士eVTOL。這個飛行的士由初創(chuàng)公司Vertical Aerospace生產(chǎn),可以像直升機一樣垂直起落,在高空中則可以像飛機一樣飛行。它是完全電動的,飛行時速最高可達每小時80英里。
2018-09-19 14:32:004155 頻率計又稱為頻率計數(shù)器,是一種專門對被測信號頻率進行測量的電子測量儀器。本視頻主要介紹了頻率計工作原理以及數(shù)字式頻率計的工作原理。
2018-11-07 16:00:0743560 來源為DJI2312無刷電機,通過控制PWM的增減量實現(xiàn)電機的調(diào)速。采用光流實現(xiàn)對飛行器飛行高度的準確控制,采用攝像頭使飛行器在A區(qū)降落和識別尋找小車。通過對飛行器飛行參數(shù)采集和處理,運用相應(yīng)的控制算法,實現(xiàn)飛行器的自主飛行、懸停、降落
2018-12-24 08:00:0022 空中客車直升機公司宣布,其VSR700演示器已在法國南部伊斯特爾的軍事空軍基地成功完成完全無人駕駛自主飛行。
2019-01-22 17:25:083083 5月1日報道,Percepto公司宣布,已成功完成5G無人機網(wǎng)絡(luò)飛行試驗。在此次飛行試驗中,自主無人機采
2019-05-08 14:59:292360 MBDA透露了基于其發(fā)展的Enforcer輕型武器的eVTOL無人駕駛飛行器概念,該公司設(shè)想將為部隊提供公司級的有機近距空中支援(CAS)能力。
2019-06-26 14:07:442166 競速無人機操作員通常會展示一些令人印象深刻的控制和技巧,但自主飛行競速無人機也逐漸引起人們的關(guān)注。
2019-09-18 15:47:221205 波音已經(jīng)宣布參加美國陸軍的“未來攻擊偵察機”原型競賽,并分享了被稱作 FARA 的概念旋翼機設(shè)計。
2020-03-04 15:09:292072 在我們的生活中活躍起來。 你是否看過不需要遙控操控就在空中飛行的無人機?你是否看過很炫酷的無人機編隊表演?它們都是如何實現(xiàn)自主飛行的?今天小火就來跟大家分享下無人機實現(xiàn)自主飛行,必須得運用到的積木模塊。 LiteBee
2020-03-16 10:00:557317 對四旋翼飛行器懸停困難的問題,從外力平衡與外力矩平衡兩點出發(fā),根據(jù)牛頓一歐拉方程對懸停狀態(tài)下的飛行器建立動力模型,利用PID控制理論進行回路控制,設(shè)計了四旋翼飛行器的懸停算法。現(xiàn)場飛行測試結(jié)果為飛行器在水平范圍±2 m、垂直范圍±l m的空間范圍內(nèi)漂移,實現(xiàn)了飛行器的懸停功能。
2020-04-14 08:00:006 4,返航撞擊,這個比例僅次于撞擊,若飛行器飛到建筑物或者山的后面丟失了信號,飛行器觸發(fā)返航,再加上設(shè)置的返航高度不高,因此飛行器在返航時撞擊。此種情況見到的比較多,大都是繞飛到建筑物后面,圖傳丟失
2020-08-09 00:08:116600 在灤平縣金溝屯鎮(zhèn)220千伏金鐵一、二線35號—36號雙回鐵塔及線路上空,一架多旋翼無人機按照既定RTK坐標,完成了“塔到塔”的自主飛行、自主巡檢、自動拍照等輸電線路桿塔巡檢工作全過程應(yīng)用。這標志著冀北地區(qū)首次220千伏輸電線路多旋翼無人機自主巡檢圓滿完成,實現(xiàn)了從“人工機巡”向“自主機巡”的突破。
2020-09-10 11:45:00933 電子設(shè)計大賽多翼自主飛行器設(shè)計資料
2020-12-15 18:15:339 通 用汽車的CES主題演講上,該公司展示了許多凱迪拉克汽車,無論是真實的還是概念中的,以解釋其對運輸未來的愿景。令人眼前一亮的是,該公司提出了兩種概念車,將其稱為halo portfolio。首先是
2021-01-29 18:06:501950 ADM1278設(shè)計工作表工具
2021-03-23 10:49:439 有幾家公司正在白手起家地制造無人駕駛飛行器,但自主航空初創(chuàng)公司Xwing正采取一種不同的方法,專注于現(xiàn)有飛機的軟件。近日,該公司表示,它完成了第一次完全自主的門到門商業(yè)貨運飛行演示,實現(xiàn)了一個重大
2021-04-29 16:43:221516 AD6676:高動態(tài)范圍寬帶接收器Ad6676評估板的設(shè)計工具和啟動指南
2021-05-24 10:11:2511 , 創(chuàng)客火(Makerfire) 將作為技術(shù)支持單位參與“ 無人機自主飛行編程賽 ”賽項的支持工作。 2021全國青少年無人機創(chuàng)新教育競賽活動正式啟航,快行動起來 無人機自主飛行編程賽細則 1、項目簡介 無人機自主飛行編程賽以“ 探索太空 ”為主題,讓
2021-06-18 16:43:281494 
軟啟動器通過微電腦控制晶閘管觸發(fā)導(dǎo)通角實現(xiàn)交流調(diào)壓,是一種集電機軟起動、軟停車、輕載節(jié)能和多種保護功能于一體的新穎電機控制裝置。 工作原理 軟啟動器采用三相反并聯(lián)晶閘管作為調(diào)壓器,接入電源和電動機
2021-08-12 15:25:2221584 多旋翼飛行器設(shè)計與控制的半自主自駕儀的位置控制
2021-09-14 10:11:250 一款好的電腦設(shè)計工具對于設(shè)計師而言就猶如神兵利器,有了它,設(shè)計工作的開展簡直如虎添翼、效率倍增,很多一閃而逝的靈感可以完美呈現(xiàn)給客戶。下面介紹的4款全面且強大的電腦設(shè)計工具一定能祝你的工作一臂之力
2021-09-26 16:25:33630 
1 和圖 2 所示。二、要求1. 基本要求(1)四旋翼自主飛行器(以下簡稱飛行器)擺放在圖 1 所示的 A 區(qū),一鍵式啟動飛行器,起飛并在不低于 1m 高度懸停, 5s 后在 A 區(qū)降落并停機。懸停...
2021-11-15 12:06:024 四旋翼自主飛行器探測跟蹤系統(tǒng)
2021-12-09 10:51:1020 電子發(fā)燒友網(wǎng)站提供《創(chuàng)建一個自主飛行的六軸飛行器.zip》資料免費下載
2022-11-24 10:26:500 軟啟動器工作原理 工作原理:當(dāng)使用軟啟動器啟動電動機時,晶閘管的輸出電壓逐漸增加,電動機逐漸加速,直到晶閘管全導(dǎo)通,電動機工作在額定電壓的機械特性上,實現(xiàn)平滑啟動,降低啟動電流,避免啟動過流跳閘
2023-04-17 10:35:422304 ? 編者按:本文是高超聲速飛行推進系統(tǒng)專題文章,給出了高超聲速飛行總體概念,確定了適合實現(xiàn)高超聲速飛行的兩種主要飛行器類型——高超聲速滑翔飛行器(HGV)和高超聲速巡航導(dǎo)彈(HCM),確定了其飛行
2023-09-04 11:47:391250
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論