 電子發燒友App
電子發燒友App


摘 要:傳統的遠程監控系統一般采用C/S 模型的方式,針對大型設備,成本高。文章采用SOC 芯片C8051F020 和10M 自適應網絡芯片RTL8019AS 接口的方案,在單片機中嵌入了精簡的TCP/IP 協議棧,構建了基于Web 的單片機遠程監控系統軟、硬件平臺,在此基礎上實現了基于單片機的數據采集和遠程監控,所實現的系統具有成本低廉、操作方便、可靠等優點。
1. 引言
單片機系統以其簡單、高效的特點,在工業控制和日常生活中應用越來越廣泛。目前大多數單片機系統是以51 單片機為核心,與檢測、伺服、顯示設備配合起來實現監控功能。
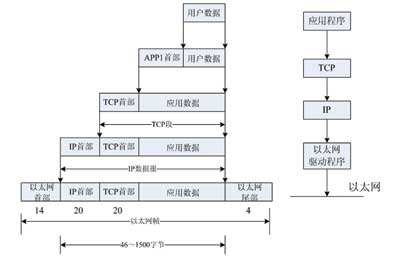
然而,這些監控系統的數據傳輸多采用RS-232、RS-485 以及各種現場總線,這些方式有些通信速度不夠快,有些距離不夠遠,且各種總線之間難于實現互連和互操作。以太網作為目前應用最為廣泛的局域網,在工業自動化和過程控制領域得到了越來越多的應用。同時,隨著Internet 的普及,現代通信技術的進步,基于TCP/IP 和Client/Server 架構的分布式監控技術也日趨成熟。把嵌入式系統連接到Internet 上,就可以方便、低廉地把信息傳送到世界的任何一個地方。

圖1 傳統遠程監控系統模型
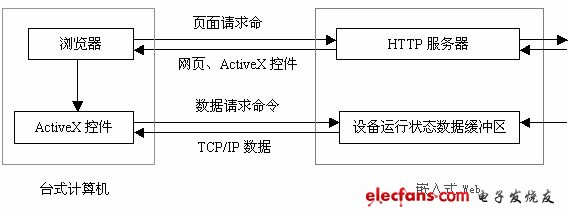
圖2 單片機監控系統模型
?
傳統的遠程監控系統一般采用C/S 模型的方式,主要針對大型的設備進行監控。對于如攝像頭圖象監控﹑家用儀表﹑門禁控制系統等小型的設備的監控就需要采用低成本的方案。
鑒于此,在低成本的單片機系統上移植精簡的TCP/IP 協議簇,實現對于小型設備遠程監控是最佳選擇。該系統以Web 方式實現,用戶可以在任何一臺裝有瀏覽器的PC 機上進行遠程監視與控制,具有價格低廉、操作方便、界面友好等優點。傳統的遠程監控系統模型與本系統采用的模型如圖1 和圖2 所示。
【詳情參閱:基于Web的單片機遠程監控系統設計方案】
二、基于GSM模塊TC35T的無線遠程監控
GSM系統是目前基于時分多址技術的移動通信體制中比較成熟、完善、應用最廣泛的一種系統,GSM的短信息系統以其快捷方便而且廉價的特點擁有廣泛的用戶,同時也為遠程監控提供了一種新的技術手段。利用GSM短信息(SMS)進行遠程監控具有投資少、成本低、可靠性高等特點,在一些對操作和監控的實時性要求不高的情況下具有很高的性價比。
無線GSM通信模塊TC35T
TC35T是SIEMENS公司推出的GSM專用調制解調器,主要由GSM基帶處理器、GSM射頻模塊、供電模塊、閃存、ZIF連接器、天線接口六部分組成,可完成語音、數據、短消息以及傳真的傳送。TC35T具有標準的工業接口和完整的SIM卡閱讀器,因此使用非常簡單,其結構如圖1所示。

GSM遠程監控原理和實現
GSM遠程監控系統由控制端和受控端兩部分組成,如圖2所示,控制端可以是手機,也可以用TC35T模塊和PC組成。
【詳情參閱:基于GSM模塊TC35T的無線遠程監控】
三、基于SMS的智能家居遠程監控系統
1 引言
隨著生活節奏的加快,生活水平的提高,人們對現代家居的安全性、智能性、舒適性和便捷性提出了更高的要求。智能家居控制系統就是適應這種需求而出現的新事物,正朝著智能化、遠程化、小型化、低成本等方向發展。如今手機已經十分普及,如何讓普通百姓只需要增加少量投入便可以通過手機遠程遙控自己家中的電器設備,遠程查看設備或安防系統狀況。同時,一旦家中發生煤氣泄露、火災、被盜等安全事故時能夠立即獲知警報,及時處理。為此本文提出了一種基于SMS 和Atmega128 的智能家居遠程監控系統。
2 系統結構及工作原理
本文所設計的智能家居遠程監控系統由CP U 模塊、短信收發模塊、電源模塊、時鐘模塊、LCD 顯示模塊、鍵盤模塊、驅動模塊、無線收發模塊、檢測模塊等模塊組成,如圖1 所示。系統的工作原理如下:用戶通過手機將控制或查詢命令以短信的形式通過GSM 網發送到短信收發模塊,CPU 再通過串口將短信讀入內存,然后對命令分析處理后作出響應,控制相應電器的開通或關斷,實現了家電的遠程控制。CPU 定時檢測煙感傳感器、CO 傳感器、門禁系統的信號,一旦家中發生煤氣泄露、火災、被盜等險情時,系統立即切斷電源、蜂鳴器警報并向指定的手機發送報警短信,實現了家居的遠程監視。為了達到更人性化的設計,當用戶在家時可通過手持無線遙控器控制各個家電的通斷,通過自帶的小鍵盤設定授權手機號碼、權限和設定系統的精確時間等參數。 LCD 用來實時顯示各電器狀態和各個傳感器的狀態。

圖1 系統結構框圖
3 硬件系統設計
CPU 選用Atmega128 單片機,它是基于AVR RISC結構的8 位低功耗CMOS 微處理器,具有性價比高、功耗小、可靠性高等特點。短信收發模塊選擇廈門桑榮公司的Saro310 GSM Modem.傳感器選擇香港嘉永公司的SS-168 煙感探測報警器、HD-111 家用CO 探測報警器。它們在檢測到危險信號時輸出開關量信號,能及時準確地向CPU 發出報警信號。LCD 顯示模塊選用LCD12864 帶中文字符型液晶顯示屏,它自帶漢字字庫, 只用查詢中文字庫表便能實現LCD 的中文顯示, 占用CPU 管腳少,只需三個管腳便能完成通訊和控制。
【詳情參閱:基于SMS的智能家居遠程監控系統】
四、高等病房遠程監控系統解決方案
一、概述
閉路電視監控系統正日益受到人們的廣泛重視和應用,其產品的種類和檔次也越來越多。根據醫院的要求,本著高水準、高質量,提高產品的性能價格比,在設計上充分體現建設者的意圖,同時考慮到今后使用者的使用、維護、保養的方便性,設計了該系統的總體方案。本方案分為兩部分:病房呼叫系統和病房監護系統 。
二、系統架構
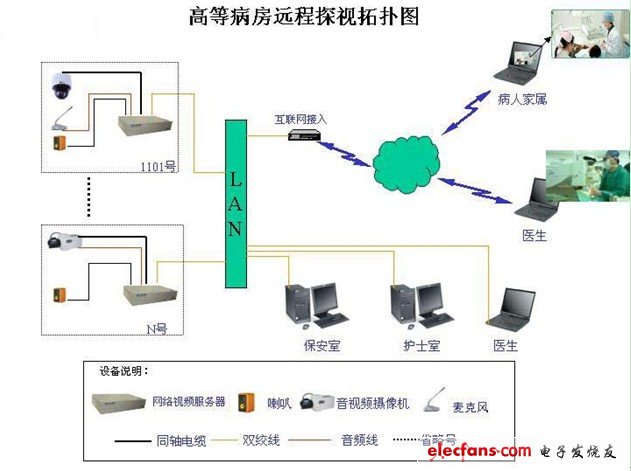
高等病房遠程監控系統設計方案系統架構
三、系統功能
系統主要由兩部分軟件組成,第一為系統管理軟件,基于WEB方式,主要用于護士管理病人,包括向系統添加新住院病人,出院登記;病人家屬遠程登入系統,在線觀看病人現場情況;醫生在醫院或家中觀看病人情況,系統管理員添加護士、醫生進入系統等操作。第二為監控軟件,主要用于護士對所有病人的集中監控,一個電腦畫面可以同時顯示16個畫面,可以設置10組,可以設定循環時間,在10個組中切換。 并且當病人需要呼叫醫生時可以按一個按鈕,改按鈕接到服務器上,護士的電腦上將顯示該病人的畫面,同時可以與該病人對話。
【詳情參閱:高等病房遠程監控系統解決方案】
五、基于Android智能家居遠程監控系統設計
摘要:目前,遠程視頻監控系統已成為智能家居的重要組成部分。智能監控系統基于Android操作系統平臺,以平板式計算機作為客戶端,通過HTTP協議從IP攝像機下載監控圖片,并利用多種算法對家中各房間或不同角度的情況進行智能監控。
近年來,視頻監控系統已在制造企業、物業管理、無人職守終端、銀行、交通、倉庫等領域得到廣泛應用。當家庭中有特別需要關注的物體和區域時,家庭的主人可在其所處的家庭環境中安裝攝像頭,通過網絡遠程觀察其狀況,當發生意外情況時也可通過網絡監控事態的進展。隨著智能移動終端的廣泛普及,同時由于其特有的便攜性和易于接入網絡的特性,移動終端成為動態監控和現場監控的理想選擇。
本文設計的視頻監控系統客戶端設備為Android平板電腦,該客戶端從IP攝像機獲取實時的監控圖片,根據不同場景用不同算法來判斷家中有無人員出入,標注關注對象并智能跟蹤,辨別各房間的照明情況及電視、計算機等家電的使用情況,可同時實現4路智能監控。
1 監控平臺介紹
1.1 客戶端平臺介紹
客戶端采用Android 智能操作系統,Android 是Google公司于2007年11月5日發布的基于Linux平臺的開源手機操作系統的名稱。該平臺由操作系統、中間件、用戶界面和應用軟件組成,底層 Linux內核只提供基本功能,其他的應用軟件則由各公司自行開發,部分程序以Java編寫。
2011年初數據顯示,僅正式上市2年的 Android操作系統已超越稱霸10年的Symbian系統,躍居全球最受歡迎的智能手機平臺。現在,Android系統不僅應用于智能手機,也在平板電腦市場急速擴張。同時,Android智能手機操作系統具有5大優勢:開放性、擺脫運營商的束縛、豐富的應用選擇、開發商不受任何限制和無縫結合的 Google應用。
1.2 IP攝像機介紹
IP攝像機是一種可產生數字視頻流,并將視頻流通過有線或無線網絡進行傳輸的設備,其不需要額外的軟硬件,便可以將活動的數字圖像直接傳輸到互聯網上,使在世界各地的計算機都可以通過瀏覽器觀看實時活動數字圖像。IP攝像機支持TCP/IP,SMTP E-mail,HTTP以及其他Internet協議,支持諸如Windows,Unix,Mac及OS/2等多種操作系統。
該設計采用海康威視公司的DS-2DM1-502型網絡中速智能球型攝像機,支持客戶端通過HTTP協議下載監控圖片和H.264碼流。
2 程序設計原理及實現
2.1 客戶端設計原理
該設計采用Android系統的平板電腦為客戶端,客戶端的軟件流程如圖1所示。
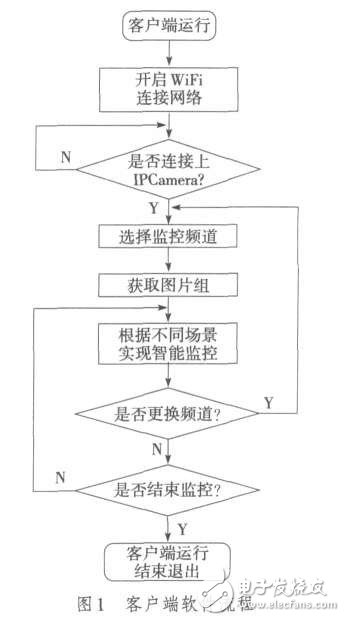
系統的具體實現大體分為兩部分:與IP攝像機連接,獲取所需視頻流;根據監控場景做出相應判斷及響應。
【詳情參閱:基于Android智能家居遠程監控系統設計】
六、基于3G通信網的移動機器人遠程監控的設計與實現
3G是第三代移動通信技術,結合了無線通信技術和互聯網等多媒體技術。隨著3G技術的發展,它在聲音和數據的傳輸速度上有很大提升,并能夠在全球范圍內實現無線漫游。其數據傳輸高速、永遠在線、覆蓋范圍廣等優點,有效地解決了移動機器人采用有線或者無線遠程控制所帶來的信息傳輸和控制距離等方面的瓶頸問題,使遠程救援機器人、仿真機器人、家庭保姆機器人等移動機器人技術在大數據量實時傳輸方面多了一種可利用的解決方案。
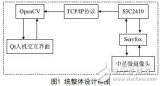
1 系統總體架構
本系統主要用來將移動機器人所采集到的視頻數據通過3G網絡傳給服務器,再將服務器的控制信號傳給電機驅動板,以驅動移動機器人平臺運動,總體架構如圖 1 所示。攝像頭OV9650采集的視頻圖像經過JPEG壓縮后,存入緩存區,當服務器監聽到客戶端的接入請求后,再將緩存區的數據通過網絡傳輸給客戶端的監控界面進行顯示;當需要控制機器人行動時,客戶端的控制按鈕發送控制信息給服務器,服務器通過程序解析后控制底層電機驅動器,驅動機器人平臺運動。
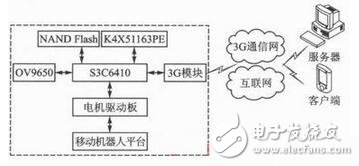
圖1 系統總體架構圖
系統硬件平臺核心處理器采用S3C6410,它基于ARM1176JZF—S內核,是一個16/32位RISC微處理器,其內部集成了強大的硬件加速器,包括音視頻處理、2D加速等,為2.5G和3G通信服務提供了優化的硬件性能,工作頻率最高可達677 MHz;采用2 GB NAND Flash,主要用于存放內核代碼、應用程序、文件系統和數據資料;DDRSDRAM采用兩片128 MB K4X51163PE芯片;攝像頭采用CMOS圖像傳感器OV9650,最高輸出130萬像素(1300×1 024),具有高敏感度、低功耗、支持多種常用的圖像格式輸出、支持自動圖像控制等優點。
Linux作為一種類Unix操作系統,具有穩定健壯、低成本、高性能、互操作性好和源代碼開放等特點。而其良好的內核結構,以及可裁剪的特性,滿足了嵌入式應用的差異性需求,使其在嵌入式系統領域占有一席之地。本系統中采用的Linux內核為3.0.1版本,文件系統采用 YAFFS2,Bootloader選用uboot。
2 系統軟件設計
2.1 視頻數據的采集與傳輸
視頻數據的采集通過Linux中視頻設備OV9650的驅動以及Video for Linux提供的相應接口完成。為了方便,將視頻采集的相關信息封裝到以下結構體中:
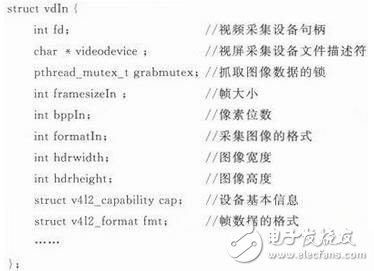
采集程序通過函數init_s3c6410(struct vdIn*vd,char*device,int width,int height)來完成對攝像頭以及采集參數的初始化,并通過函數s3c6410_Grab(struetvdIn*vd)完成對圖像的抓取,用JPEG壓縮算法對采集到的圖像進行壓縮,圖像格式為RGB565。
【詳情參閱:基于3G通信網的移動機器人遠程監控的設計與實現】
?












 工商網監
工商網監
評論