IC 包裝內部的長度計算 (pin delay)
在15.2, 新增pin property 來代表IC 包裝內部的長度, 您可以將IC 包裝內部的長度填入此字段, 并且
2009-09-06 11:22:46 3483
3483 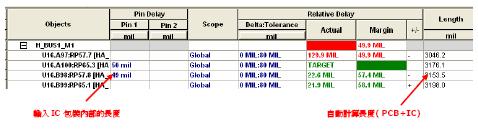
Z-STACK-HOME、 Z-STACK-LIGHTING、 Z-STACK-ENERGY有什么區別呢?我是新手,我應該下載哪個協議棧?
2018-06-01 05:10:30
我之前做四軸的時候用的MPU6050的DMP,去除重力對Z軸的影響我采用的方法如附件所示。我看MINIfly中去除重力影響的代碼是這一句:“ state->acc.z= tempacc.x
2019-07-05 04:36:02
在讀取Z-Axis Delta Angle時,快速旋轉時,出現數據突然增大的問題(低速旋轉不會出現這個現象),如何解決,是SPI讀取的問題嗎或者是沒有正確處理寄存器數據
2023-12-28 06:29:15
hi all,設置 ADXL34516g/13bit, 正面水平放置的時候,讀取 ADXL345 Z 軸的數據是 293, 反面放置的時候讀取 Z 軸的值是 -212, X,Y 軸的數據正常。同一
2018-09-19 09:59:42
使用ADXL345芯片,連續測試10個芯片,水平放置,讀取到X、Y加速度值沒問題,Z軸加速度值應該為255,但讀出卻為1280;求指導問題原因。注:Z軸加速度相對值正確
2018-09-14 14:33:47
我在使用ADXL350芯片做傾斜角度測試的時候,發現Z軸數據一致是錯誤的,而X,Y軸數據輸出都是對的。求解。另外,我用相同的線路和程序測試了一下ADXL345,發現三個軸的輸出是正確的。為什么會這樣呢。搞了2個星期了。
2018-11-12 09:37:04
ADXL357在靜止不動的平面上,z軸方向上的數據呈現有規律的正弦波,而x和y軸的數據無此異常
2023-12-27 06:54:21
讀取的是數據Z軸的數據,總是高位始終是0x00000111 低位的時鐘是11111111 數據始終不變,這是什么問題,求解答。
2024-01-01 06:52:55
我正在通過I2C讀取數據。執行的計算是正確的(將高字節和低字節轉換為12位值,并使用195mg /位將數據轉換為+/- 400g級別的標度。)。在所有三個軸上都有大約+/- 10g的噪音。因此,當
2018-10-09 11:46:17
)。 首先,我有一個小的初始化過程,根據我的需要設置芯片:啟用400Hz,X Y和Z軸,+ -2G刻度,高分辨率,SPI 4線,BDU。 然后我讀了所有6個控制寄存器和“我是誰”注冊,檢查一切是否正常
2019-01-29 14:25:34
are disabled.With the Z-Axis pointing toward earth I get the following data for the X-Axis using the H
2018-09-12 09:50:36
KW41Z/31Z/21Z勘誤手冊
2022-12-14 07:01:05
KW41Z/31Z/21Z宣傳手冊
2022-12-14 06:42:25
KW41Z/31Z/21Z數據手冊
2022-12-14 06:04:37
KW41Z/31Z/21Z硬件設計參考
2022-12-14 07:29:10
時,設備沿Z軸靜態時的默認值為5,因此5 * 192(根據數據表為1LSb = 192mg),即0.96g,約為1g但是當我們通過乘以192 * 127來計算滿量程值時(因為可以在8位有符號寄存器中設置
2019-05-15 15:18:59
嗨, 我想訪問x,y,z軸的加速度值。所以我從寄存器x(0h28,0h29)和y(0h2A,0h2b)得到響應和值,但z加速度(0h2C,0h2D)的寄存器始終為零。有任何想法嗎?我用邏輯分析儀
2019-05-16 10:33:21
為 g'。我的問題是:即使沒有施加振動并且傳感器安裝在水平表面上,傳感器也會顯示Z軸輸出的波動。這種波動的范圍大約為0.6g至1.2g。我附上了一張顯示這種輸出的圖像。 (X軸是時間,Y軸是以g為單位
2019-05-21 13:35:00
PCB上,平行于X,Y軸并垂直于Z軸。所有三個軸的讀數都在0.01到-0.15左右波動。在初始化中,所有三個軸都已啟用。由于我對加速度計傳感器很陌生,我的理解是,在上面提到的位置,我應該得到0和0左右的g
2019-04-15 07:58:43
pi. I was able to get the angles of x, y, and z-axis based on the binary reading and I was also able
2019-03-20 10:21:04
>> 4, I am getting values which seem to be correct. For example 1000 mg (= 1g) on the z-axis
2019-04-22 16:38:14
嗨,我已經使用僅在設備水平時才有效的簡化航向計算實現了傾斜和航向計算,并且直到現在都忽略了 Z 軸上的磁場值。現在我正在嘗試實現傾斜補償航向,以便能夠在設備不水平時計算航向,并且我開始嘗試獲取 Z
2023-01-12 06:16:19
's Accelerometer X/Y/Z-axis user offset correction registers(X_OFS_USR: 0x73, Y_OFS_USR: 0x74
2019-05-28 06:17:51
lsm6dsl讀出數據,z軸數據一直有偏差。當加速度范圍設置為2G時,垂直放置在地面上,z軸向上。數據是:加速度 [mg]:30.68 106.32 1998.60z軸向下加速度 [mg]:60.21 140.42 409.37可以發現z軸有偏移。lsm6dsl上電初始化后正常嗎?
2022-12-19 08:55:52
嗨,我正在試著理解我在電路板上為LSM9DS0讀取的數據。如果我把電路板放在我的桌子上,根據數據表,我應該讀取Z-AXIS的負值,因為Z-AXIS矢量指向上,而不是我讀取1g的正值。 其他兩個軸
2018-10-29 16:16:44
等值線grid minor,xlabel(' x-axis ' ),ylabel( 'y-axis '),zlabel( 'z-axis ' );title( '1.5m高度的擴散情況') ;
2018-05-06 13:19:18
導讀:近日,江蘇多維科技有限公司(以下簡稱“MDT”)宣布推出了一款具備高靈敏度和卓越性能的Z軸TMR傳感器。該新器件可對穿過傳感器表面的磁場垂直分量進行測量,在感應方向上與霍爾效應傳感器相兼容
2018-11-05 10:52:06
最近用MPU6050的DMP做姿態模塊,能夠正常輸出,但有個問題,就是加速度計的Z軸方向感覺不對,按手冊上寫的加速度陀螺儀各軸方向應該是相同的且Z軸正向為芯片朝上,但實際測量發現Z軸的陀螺儀方向跟手
2019-04-22 06:36:34
Parker的X/Y/Z軸的工作臺程序,只有Y 運動,請大神幫忙修改一下讓三個軸都能來回運動!!
2016-08-02 17:08:40
只有x軸有數據且一直為正數,而y,z軸始終沒有數據
2019-01-15 07:18:53
TCL 2586Z/2988Z/2989Z彩電原理圖文件下載
2021-06-25 06:14:19
TCL 9329Z/9525Z/9529Z彩電原理圖文件下載
2021-06-24 06:23:35
對于調好了X,,Y軸的四軸在調Z軸的時候,直接對陀螺儀輸出的Z軸角速度進行PID控制,但是PID參數無論怎么改還是不能改變四軸逆時針旋轉。對于Z軸的調試網上沒有任何參考信息,還請那位調過Z軸的朋友能指點下,萬分感謝啊。
2019-04-29 06:36:22
adxl345的內部ID讀取出來是正確的,x,y軸讀取出來與實際有偏差,但是0g校準差不多消除很多偏差,但是z軸讀取出來的數據最高位的范圍在0x02-0x05,就是說z軸無論怎么旋轉,怎么放置,都是
2019-03-11 13:59:18
adxl345能否用于檢測沿Z軸方向做上下運動的加速度,X,Y軸保持水平不變,就Z軸上下直線運動。
2018-05-24 10:05:23
本帖最后由 jonghne 于 2016-10-18 16:49 編輯
讀取lsm6ds3加速度值,x軸y軸變化范圍正確,z軸變化范圍大概1g~3g,芯片反過來放時為g,側放為2g,正面
2016-10-18 16:39:46
什么是高Z引腳?我只是想知道高Z是什么意思?如何提供足夠的電壓???? 以上來自于百度翻譯 以下為原文What are high z pins? I just wanted to know
2019-01-23 12:40:10
我在使用ADXL350芯片做傾斜角度測試的時候,發現Z軸數據一直是錯誤的,而X,Y軸數據輸出都是對的。求解。另外,我用相同的線路和程序測試了一下ADXL345,發現三個軸的輸出是正確的。為什么會這樣呢。搞了2個星期了。
2024-01-02 08:29:19
大家好,我使用ADXL372讀取x,y,z三軸數據。初始化是簡單的進入Full band width measurement mode,其它都是默認配置。ADXL372_Write_Reg
2018-06-11 09:53:23
and enable interrupt5. Write 0Ch to TAP_THS_6D // Set Z-axis threshold6. Write 7Fh to INT_DUR2
2023-02-03 10:40:52
Z11 Z12 Z13 Z14 Z15 Z16 W9 Z1 Z2 Z3 Z4 Z5 Z6 Z7 Z8 Z9 Y1 Y2Y3 Y4 Y5 Y6 Y7 Y8 Y9 Y10 Y11 Y12 Y13 Y14
2015-11-13 13:57:26
面向全國求購R&S ZV-Z51 ZV-Z52 網絡分析儀校準件ZV-Z52 ZV-Z51 ZV-Z132 ZV-Z135RS ZV-Z52 ZV-Z51 ZV-Z132 ZV-Z135校準
2020-07-19 16:42:49
, the X-Axis, and Y-Axis values get some normal values (they oscillate between -10 and +10) but the Z-Axis
2018-12-05 16:09:27
正在弄L3G4200D這個三軸螺旋儀的芯片,里面有幾個x,y,z方向的寄存器。如圖手冊介紹。里面說是把x,y,z方向的角速度用二進制補碼形式存放在寄存器中,我想知道是,這個數據怎么轉換成我們熟悉的以rad/s為單位的角速度數據?求解。
2014-10-15 19:38:03
`還在delay函數初始值大小設置而延時多少時間煩惱嗎?該小軟件幫你忙!經本人用keil c 軟件仿真測試過,該程序計算時間準確。之所以做這個軟件是看了鴻哥的DS18B20的程序,由于很多芯片像
2013-09-25 19:22:35
四軸實現自穩 飛控上的陀螺儀為什么需要Z軸?X,Y不就行了嗎?
2016-08-03 17:48:55
四軸實現自穩飛控上的陀螺儀為什么需要Z軸?X,Y不就行了嗎?
2019-05-29 01:28:56
(ACCEL_ZOUT_H);;//Z_angle = (Z_angle/8192)*9.807;//Z-axis accelerometerY_angle = GetData(ACCEL_YOUT_H
2016-04-21 14:45:22
嗨,我是LSM6DS3慣性模塊的新手,我試圖在我的arduino mega 2560中使用它,在SPI模式下,但在Z&加速度計的Y軸輸出。 X軸輸出反應良好。已經嘗試在讀取和不讀
2019-05-16 15:46:37
求助:在runPidZ函數中axis->setpoint + = setpoint->velocity.z *dt , 其中axis->setpoint會不會一直增大啊
2019-06-06 04:36:43
現在想利用3軸加速度計計算Z方向的角度,但是網上都說需要磁力計,請教有沒有一位大神知道在沒有磁力計的情況下如何計算Z方向角度
2023-10-30 07:05:34
word格式文檔專業整理word格式文檔專業整理計算機控制系統大作業姓名:陳啟航學號教師:周銳日期:2016年6月1日專業整理綜合習題1已知: ,1) 試用 Z 變換、一階向后差分、向前差分、零極點
2021-09-15 08:26:04
當ADXL372靜止平方在桌面時,X,Y,Z的輸出值分別為 -2 ,3 ,-42 ,為什么Z軸的輸出這么大? 是哪里出問題了嗎?幫忙解釋,謝謝
2023-12-28 08:32:57
各位大神好,小弟現在有個疑問:我利用三維繪圖軟件(CROE或者solidworks)繪制實體后,想把實體利用ARM轉換成x,y,z方向的軸的運動,類似三維打印中噴嘴固定不動,托盤運動。中間轉換的過程需要什么算法或者編程。。。請各位大神指導。。。
2014-06-03 17:59:29
嗨,我正在使用LIS2DE12加速度計,我想檢測任何新數據更新到溫度和x,y,z軸寄存器。任何一個提供配置步驟。以上來自于谷歌翻譯以下為原文 Hi, I am working
2018-09-11 16:41:10
隨著貼片速度的提高以及精度的提高,對貼片頭將元件貼放到PCB上的“貼放力”要求越來越高,這就是通常所說“Z軸軟著陸功能力”。通過安裝在貼片頭上的一種傳感器以及伺服電動機的負載特性實現Z軸軟著陸
2018-09-07 16:11:57
提問:無人機 程序中,為什么加速度計的 X,Y軸可以自動計算偏移值后自動校正。但是Z軸自動計算偏移值后還要減去8192 ?謝謝!
2018-10-19 17:24:06
flip from Z-axis. On a flat surface, Z-axis pointing upwards gives me approx +1g (decimal 65
2019-04-16 13:33:16
有人會用chirp-z逆變換嗎?labview給出的inverse-chirp-z模塊示例圖,我按照圖連接,計算出來的結果好像不對,最后出來的結果X跟最前面輸入的X不相同,也可能是我不會用,有人會嗎?請教一下
2023-01-30 22:04:35
, an electrostatic force is applied to each axis to cause it to deflect. The Z-axis is trimmed to deflect
2017-03-27 20:45:37
您好,我正在使用 LIS3DHTR 進行測試,我注意到 Z 軸比其他軸噪聲更大。加速度計的位置無關緊要,始終 Z 軸噪聲較大。為什么會發生?
2023-01-05 06:08:56
標準的浮點數計算方法,那么請是怎么計算出來的,找了之前2015年的帖子,BQ34Z100的,但是好像不適合BQ20Z45能麻煩TI的工程是幫忙解答一下嗎?
2019-03-26 16:31:40
,H1-2,G1-2,作為 X/Y/Z-Axis Accelerometer Filter Pin,這個又如何使用呢?(第一頁框圖顯示外接電容,那外接不同的電容,對濾波的影響是什么呢)盼回復,感謝!
2018-08-16 06:05:45
adxl345能否用于檢測沿Z軸方向做上下運動的加速度,X,Y軸保持水平不變,就Z軸上下直線運動。
2019-01-25 08:27:03
朝上那個軸,本菜鳥把MPU6050平放,X,Y的數據都接近0°,Z軸竟然90°????這是芯片設計的問題嗎?看到網上有人說Z軸加速度計算角度不能再按照XY直接用反正切求了,但是具體沒說明白,網上找很久也
2019-04-03 01:52:23
調試ADXL372,Y軸和Z軸的MSB輸出數據是0xFF?
X軸輸出是正常的,YZ軸MSB為什么輸出是0xFF,讀ID和寄存器都是正確的
2024-01-15 08:08:51
在泛用機中,支撐貼片頭的基座固定在X導軌上,基座不進行Z方向運動。貼片機Z軸控制系統是指貼片頭的吸嘴運動過程 中的定位,即取料和貼片過程中的Z方向定位,以適應不同PCB厚度和元件高度,滿足貼片
2018-09-04 16:04:10
系列型號:SMA2.5Z6.8A、SMA2.5Z7.5A、SMA2.5Z8.2A、SMA2.5Z9.1A、SMA2.5Z10A、SMA2.5Z11A、SMA2.5Z12A、SMA2.5Z
2022-07-27 10:27:57
選項. 點選 Electrical Constraints dialog box 下 Options 頁面 勾選 Z-Axis delay
2010-11-24 11:28:29 0
0

 電子發燒友App
電子發燒友App





 工商網監
湘ICP備 2023018690 號
工商網監
湘ICP備 2023018690 號




評論