 電子發燒友App
電子發燒友App


一種新穎的精密陀螺電源
摘要:文章介紹一種采用SPWM、雙單片機和開關電源等技術研制開發的精密陀螺電源,內附毫瓦計,性能優良,可廣泛用于高精度的陀螺中。
關鍵詞:陀螺SPWM調制開關電源毫瓦計
1引言
高精度陀螺廣泛用于航天、航空等領域,它的精度和使用壽命很大程度上取決于陀螺軸承,因此對軸承工作狀態的研究是很關鍵的。一般是使用專用精密電源和功率計,在它穩定工作時測量電源輸出功率的變化,以此反映軸承的工作狀態。傳統的電源采用振蕩器產生三相正弦波,通過功率放大后輸出。但這種電源功耗很大,散熱困難,由此引起的元件參數變化使輸出精度、穩定性很難保證。而且電源體積較大,和功率計分體,使用起來很不方便。
美國從20世紀60年代起,研制了一種陀螺電源,內附精密差分毫瓦計。利用它可以精確測出高速旋轉中陀螺性能的各種細微變化,從而確定軸承的性能是否滿足要求。但是該電源售價高達16490美元,約合人民幣14萬元。
根據有關部門提出的技術參數,我們采用SPWM、雙單片機和開關電源等多種技術研制了內附毫瓦計的精密陀螺電源。
2技術指標
本電源技術指標是按現使用的部分航天陀螺電機的特性確定的,詳細資料見表1。
表1陀螺電機特性
|
型號 |
額定電壓V |
額定電流A |
額定轉速(頻率)rpm(Hz) |
起動電流A |
|---|---|---|---|---|
|
A |
20 |
0.1~0.2 |
10000(166.7) |
0.3~0.5 |
|
B |
26 |
0.11~0.13 |
1200(200) |
0.15~0.18 |
|
C |
32 |
0.1~0.2 |
15000(500)4極 |
0.3 |
|
D |
32 |
0.13~0.15 |
24000(400) |
0.18~0.2 |
|
E |
40 |
0.4 |
24000(400) |
2 |
|
F |
40 |
0.13~0.15 |
30000(500) |
0.18~0.2 |
|
G |
40 |
0.2~0.3 |
30000(500) |
2 |
為了精確測出由于陀螺電機內部狀態變化而導致的電源輸出功率變化,必須保證陀螺電機供電電源的高度穩定性。由表1可見,電機的正常功率約為2~16W,而要求測出的功率變化量在50mW以下,分辨率暫定為1mW,因此其相對功率變化量應達到3‰~25‰。
據此確定本電源基本技術指標如下:
?輸出功率不超過20W
?輸出功率分辨率1mW
?輸出功率精度10mW
?輸出電壓12~40V三相交流,有效值
?輸出電壓穩定度5×10-4
?輸出電壓精度±2%可校準到±0.1%
?輸出波形正弦波(包絡)
?輸出電流1A短時2A
?輸出頻率167,200,250,400,500Hz
?輸出頻率穩定度1×10-5/d
3系統結構
系統采用SPWM技術產生三相輸出,使功率器件工作在開關狀態,故只有極低的功率耗散。既使整機功耗降低,機箱溫度變化減小,又使器件因溫度變化帶來的誤差變小,有利于提高整機的精度和穩定性。同時,SPWM波形的諧波含量較小,電機電流波形接近正弦,陀螺電機的諧波損耗也小。
系統由開關穩壓器、直流穩壓器、三相逆變器、波形發生以及測量控制等幾部分構成,結構如圖1所示。
因為需要實時地產生三相SPWM波形,同時又
圖1系統結構圖
進行實時測量,所以使用一個單片機是很難實現的。本系統用了兩片8031來完成上述功能的。
為保證系統輸出電壓的超高穩定度,直流母線電壓必須非常穩定。因此首先采用開關穩壓器將輸入的交流進行粗穩(即相當于開關電源),然后用串聯型直流穩壓器進行精密穩壓。只有這樣才能滿足系統性能要求。
4硬件設計
4.1開關穩壓和串聯穩壓電路
通常的直流串聯型穩壓電路,其調整管工作在線性區,在一定負載電流下,當輸出電壓最高、輸入電壓最低時,管耗最小;當輸出電壓最低、輸入電壓最高時,管耗最大。如果系統設計為多種陀螺電機都能使用,則電壓變化范圍大,調整管壓差以及功耗往往會大到無法接受。但本機不允許機內功耗過大和機箱內溫度變化過大。如果僅采用開關穩壓電路穩壓,則會造成輸出有高頻紋波的干擾,這使得僅用單一的穩壓電路是無法實現要求的。
為此我們設計了一種獨特的穩壓電路,先用由TL494控制的開關穩壓器進行預穩壓,再由后續的直流穩壓器將輸出電壓穩定到規定的數值,裝在儀器面板上的多圈精密電位器可將輸出電壓設定到所需的數值,此電位器同時控制了直流穩壓器的輸出電壓及開關穩壓器的輸出電壓,并從電路上保證了前一點電壓始終跟蹤后一點電壓,壓差穩定且很小,所以直流穩壓器在任何情況下都能保證調整管功耗不大。
TL494是一種很成熟的PWM控制芯片,內有兩路誤差放大器。通常使用時一路用于電壓反饋,一路用于電流反饋,控制輸出脈沖的占空比。在這里兩路都用于電壓反饋控制,只是一個從串聯穩壓器輸出取作為基準,另一個從開關穩壓器輸出取,用來跟蹤基準的變化。這樣,不論設定如何變化,TL494都會調整輸出占空比,達到開關穩壓器輸出跟蹤上串聯穩壓器的輸出變化。
串聯穩壓電路為完成系統的要求,必須有高穩定度的電壓基準。我們采用了LM399H(6.95V的電壓基準),其溫度系數為2ppm/℃。電源的穩定度除取決于LM399外,其關鍵在取樣電阻分壓器的穩定度。為保證其分壓比不隨環境溫度而變,同樣選用了高穩定度電阻,電路中的24k電阻實際是由同樣的3.9k的電阻6只串聯而成,10k電位器也是精密多圈線繞電位器,這樣所有電阻功耗相等,溫升也相等,而且其本身溫度系數很小,只有±5ppm,所以其分壓比固定不變,于是直流穩壓器的輸出電壓不會變化,實測穩定度優于1×10-4,完全滿足要求。
![]()
圖2逆變電路
4.2逆變電路
逆變電路結構如圖2所示:
逆變橋的三個橋臂驅動信號必須保證上下相互讓開一定的時間,即死區時間。如果能在8031產生波形同時形成死區時間是最為理想,但這很難實現。為此我們采用硬件實現,見圖3。每一路波形信號經延時、整形,其導通時間會縮短,就得到了死區時間T,這里T=100kΩ×15pF=1.5μs,實驗證明這一方法簡單有效。
圖3死區時間形成電路
驅動電路采用美國IR公司的集成驅動芯片IR2110三片,電路簡單可靠,輸出驅動能力強,且具有過流保護功能。2110內部有電流比較器,當電流取樣值超過設定值時,比較器輸出翻轉,將驅動信號鎖死,逆變器沒有輸出,保護了電路免受破壞。
逆變器選用6只IRF540功率場效應管,IRF540內阻低、熱阻小,很適合輸出級使用。例如當輸出電流0.2A時,其管壓降只有15.4mV,功耗3mW,幾乎可以忽略不計。
4.3單片機系統
圖4 過流保護電路框圖
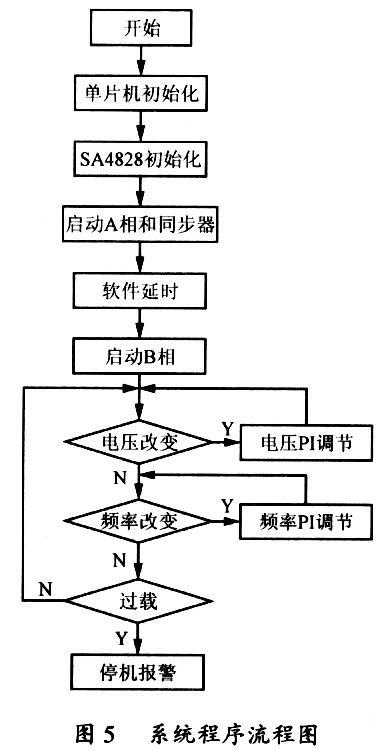
單片機系統分兩部分,每一部分用一片8031控制:8031A只是用來產生SPWM波形,8031B完成鍵盤、顯示、測功和計算、打印的功能。結構如圖4。
系統要求輸出的頻率穩定性很高,因此單片機8031A專門用來發波形。波形是先離線計算好,每一種頻率對應一組數據,包括輸出電平為高為低以及脈沖的時間寬度,全存在存儲器中。當收到8031B的起動命令和輸出頻率后,從存儲器取出輸出值送到IO口。同時,打開定時器,到設定時間后送新數。因此,電源輸出頻率的穩定度基本是由單片機的晶體振蕩器穩定度決定的,而晶振的頻率定度遠遠高過系統要求。
8031B掃描鍵盤,得到輸入命令后,與8031A通信。在起動之后,實時檢測母線電壓和電流,實時計算,顯示功率及其變化量,記錄以備打印輸出。這里主要是要求系統測出功率變化量,以此反映陀螺電機內部狀態的變化量,所以對功率絕對值并無很高要求。取直流母線的電壓和電流相乘計算功率。這個值基本與實際值相等,且省去了測功率因數。電流和電壓經高精度模擬開關MAX301送入ICL7135進行A/D轉換,ICL7135是4位半雙積分A/D轉換器。單片機從7135取出轉換結果,進行乘法計算,得出結果。
5結束語
本文重點介紹了電源硬件,對軟件未作敘述。綜上所述,本系統有諸多特色,如雙單片機,正弦脈寬調制,帶開關穩壓器的高精度直流可調電源等等。經長期使用,未出現任何問題,可靠性很高,因此本電源對精密陀螺的研制開發具有重大的意義。
|
? |
? |












 工商網監
工商網監
評論