 電子發燒友App
電子發燒友App


基于MC56F8323的單相功率因數校正模塊的應用
基于DSP的數字控制逐漸和電力電子應用緊密結合,功率因數校正是電力電子技術的一個重要應用,利用Motorola新型號MC56F8323的高性能特性,完成了基于DSP的功率因數校正應用模塊研究,給出了詳細的系統設計和控制參數。最后用一臺500W實驗樣機驗證了數字控制所帶來的優良的系統性能。
關鍵詞:功率因數校正;數字信號處理;PI控制
0 引言
??? 電力電子變換技術是隨著電力半導體器件的發展而發展的。隨著計算機和信息技術的飛速發展,數字信號處理技術應運而生,并得到了迅速的發展。數字控制由于其控制理淪與實施手段的不斷完善,且閱為其具有高度集成化的控制電路、精確的控制精度、以及穩定的工作性能,如今已成為功率電子學的一個重要研究方向,而且數字控制也是最終實現電源模塊化、集成化、數字化、綠色化的有效手段。
??? 功率因數校正作為電力電子功率變換的一種典型應用,具有廣泛的工程應用價值,本文研究的內容是在Moturola的MC56F8323所構成的數字控制硬件基礎上,對數字化控制的功率因數校正應用模塊進行了研究,將數字化控制應用到高頻開關的功率因數校正領域。
l 單相功率因數校正技術
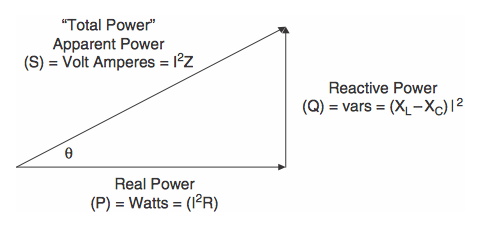
??? 功率因數PF(Power Factor)的定義是交流輸入有功功率P與輸入視在功率S之比,其表達式為
??? 
式中:Vrms是電網電壓的有效值;
??? Irms是電網電流的有效值;
??? V1rms是電網基波電壓有效值,在以下的討論中,都認為電網電壓是理想的正弦波,即Vrms=V1rms。
??? I1rms是電網基波電流有效值;cosΦ是基波電壓電流的相移因數(displacement factor):
??? γ=I1rms/Irms是電網電流的失真因數(distonlon factor)。
??? 因此,功率因數PF又可以定義為電流失真因數和相移因數的乘積。
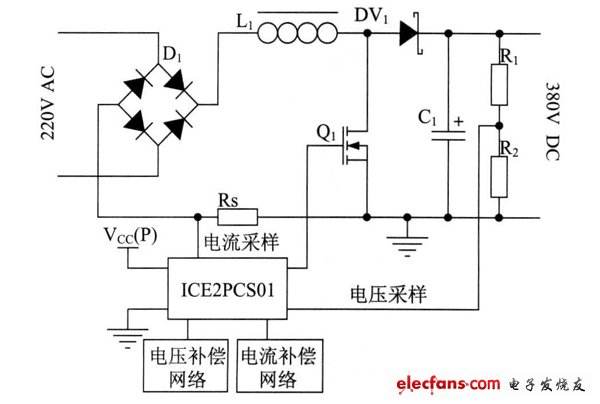
??? 單管Boost型PFC電路是現在實際工程應用中最為廣泛的一種有源功率因數校正電路,其電路工作框圖如圖1所示。主電路由不可控整流電路、電感、開關管和濾波電容組成。其輸入側有儲能電感L,可以減小輸入電流紋波,防止電網對主電路高頻瞬態沖擊,且可減少對輸入濾波器的要求,對整流器呈現電流源負載特性;其輸出側有濾波電容,可以減小輸出電壓的紋波,對負載呈現電壓源特性。

??? 從前面的分析可知,PFC電路主要完成兩方面任務:
??? 1)控制電感電流,盡量使輸入電流接近正弦,保證其γ接近于1,并使輸入電流基波跟隨輸入電壓相位;
??? 2)控制輸出電壓,使輸出電壓保持恒定。
??? 因此需要兩個控制環進行控制,電壓環是外環,采樣輸出電壓,保持輸出電壓恒定;電流環是內環,采樣電感電流,迫使電感電流跟蹤電流給定,減小輸入電流諧波。
2 基于數字控制功率因數校正模塊的系統框架
??? 數字化使得電力電子變換控制更為靈活,在CPU計算速度允許的情況下,可以實現模擬控制難以做到的復雜控制算法,用戶可以根據自己的系統需求,方便地更改控制器參數,即便是在控制對象改變的情況下,也不需要對控制器硬件做修改,只要改變某些軟件參數即可,從而大大增強了系統的硬件兼容性。另一方向,數字電路不易受到外界環境的干擾,增強了系統的可靠性。
??? 但是,數字控制所采用的CPU計算速度決定廠數字控制系統的適用場合,現在數字控制多被用于計算速度要求不太苛刻的場合,例如,UPS和逆變器控制等,計算頻率一般小于20 kHz。控制頻率大于100 kHz的高頻功率變換現在主要還是采用模擬器件控制,這主要是受到CPU計算速度的限制。本文采用Motorola公司的新型DSP芯片MC56F8323,將數字控制引入到高頻有源功率因數校正的控制之中,完成了基于數字控制的功率因數校正模塊應用,并取得廠良好的控制效果。
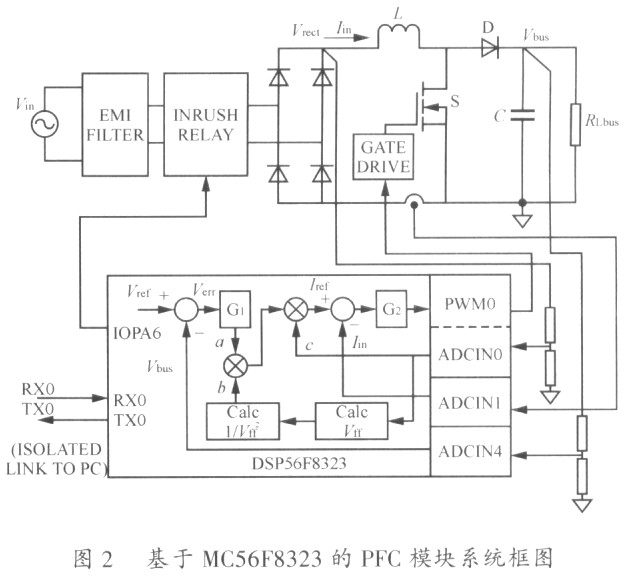
??? 基于MC56F823的PUC模塊系統框圖如圖2所示,主電路采用傳統的單管Boost的功率拓樸結構,由主功率管S,升壓二極管D,儲能電感L以及輸出電容C組成,輸入側還包括輸入EMI濾波,輸入繼電器以及二極管全波整流電路。全波整流電壓Vrect,輸入電流Iin,和輸出直流母線電壓Vbus三個模擬變量送至DSP模數轉換。本文的數字調節器均采用PI算法。從圖2中可以看出,數字PFC
采用雙環控制,外環電壓環速度較慢,輸出的直流母線電壓經采樣與輸出電壓的給定值相比較,經電壓環PI調節器G1,輸出表示為a。
??? G1的傳遞函數為
??? 
式中:Kpv為電壓環比例系數;
??? kiv為電壓環積分系數。
??? a要與另外兩個量b和c相乘,作為內環電流環的給定Iref,即
??? 
??? 即輸入全波整流電壓Vrect平均值平方的倒數,c即為輸入全波整流電壓,這樣,電壓環PI調節器的輸出a決定了電流環給定的幅值,輸入全波整流電壓的采樣值c決定了電流環給定的形狀,前饋電壓控制的引入b保證了輸入功率恒定,不受輸入電網電壓變化的影響。內環電流環的速度較快,將輸入電流采樣值與電流環給定相比較,經電流環的PI調節器G2產生變化的占空比參數,最后通過PWMO給出主功率開關管控制波形。
??? G2的傳遞函數為
式中:Kpi為電流環比例系數;
??? Kii為電流環積分系數。
??? 在進行MATLAB仿真后,可以得到電壓環、電流環的各個控制系數,在仿真初值的基礎上,進行大量的實驗調試,最后各個控制參數如表1及表2所列。為了保證在輸入電壓大范圍變化時系統性能始終達到最佳態,當輸入電壓有效值為11OV和220V時電流環分別采用不同的PT參數,這也是模擬控制所無法做到的。

??? 由于DSP的控制是一種離散的數字控制,它只能根據采樣時刻的偏差值計算控制量,因此,必須對上式進行離散化處理,用一系列采樣時刻點k代表連續的時間t,離散的PI控制算法表達式為
??? 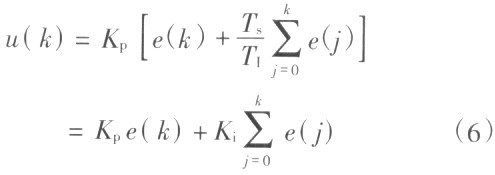
式中:k=0,1,2……表示采樣序列;
??? u(k)表示第k次采樣時刻PI調節器的輸出值;
??? e(k)表示第k次采樣時刻輸入的偏差值;
??? Ts表示采樣周期;
??? TI表示積分時間常數;
??? Kp為比例系數;
??? Ki為積分系數。
??? 數字控制程序是由主程序和中斷服務子程序組成,主要的功能模塊包括電壓環計算、電流環計算、PWM輸出刷新以及故障保護等中斷模塊,其軟件系統結構如表3所列。

3 系統實驗
??? 本文在基于MC56F8323的數字平臺上對一臺500W的PFC電路模塊樣機進行了實驗驗證,證明了在高頻功率變換應用中,使用數字控制不僅可以完成傳統模擬控制功能,而且在全輸入范圍內都能保持較高的功率因數,具有更佳的系統性能。
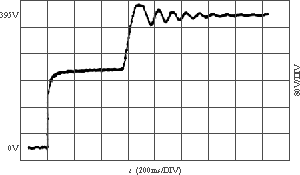
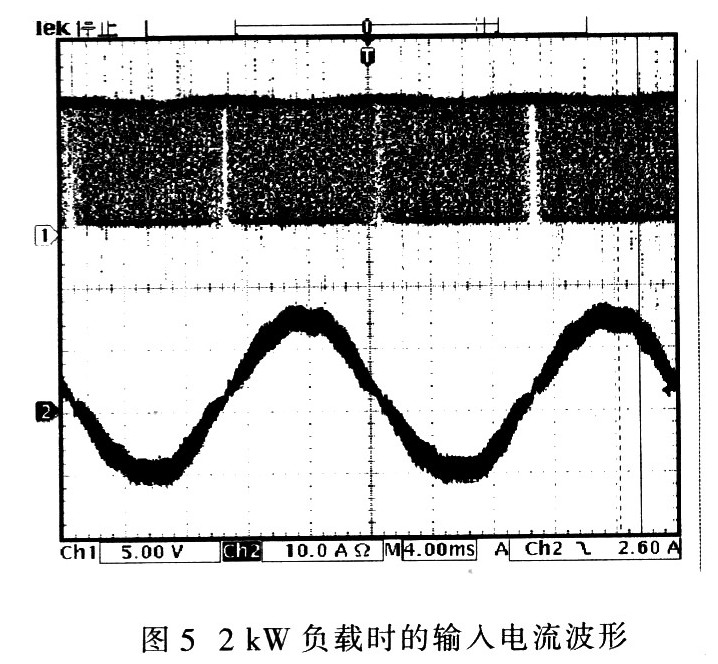
??? MC56F8323的基本特征與資源利用情況如表4所列。樣機的輸入電壓范圍為全球通用交流輸入,即輸入電壓范圍設計為AC85~265v,圖3為輸入電壓有效值為110V,輸出滿載時的輸入電壓和輸入電流波形,其中通道1為電壓波形,通道2為電流采樣波形。電壓的采樣比例為1:500,電流采樣的比例為1:lO,此時輸入電流THD為8.6%,輸入功率因數為0.994;圖4為輸入電壓有效值為220V,輸出滿載時的輸入電壓和電流波形,通道說明和采樣比例同前,此時輸入電流THD為10.5%,輸入功率因數為0.994。實驗表明當輸出滿載功率不變時,輸入電壓在AC 85~265V的范圍內變化時,輸入電流無論是波形還是相位都跟蹤輸入電壓波形,數字PFC控制始終可以使電路保持很高的功率因數。


??? 表5和表6分別為輸入電壓在110V和220V情況下,輸出負載變化時的實驗數據,從這些數據可以看出,當負載從滿載到空載變化時,輸出電壓保持恒定不變,輸入功率因數始終都維持在較高水平。實驗表明該數字控制的功率因數校正系統在較大負載變化范圍內均有較好的性能。
4 結語
??? 數字控制已成為電力電子研究領域的一個重要發展方向,基于DSP的控制技術在電力電子領域的運用也逐漸普及并受到市場的充分肯定。數字控制在功率因數校正模塊中的應用研究,不僅給出了完整的功率因數校正中的DSP控制解決方案,而且將DSP控制與電力電子專業應用更緊密地結合在一起,為電力電子設汁提供了一種新思路。本文首先給出了基于MC56F8323的功率因數校正應用的控制原理以及設計方法,最后做出了一臺500W數字功率因數校正模塊樣機,并用實驗驗證了數字控制系統的優良性能。














 工商網監
工商網監
評論