 電子發燒友App
電子發燒友App


基于小功率高溫無刷直流電動機驅動器設計
摘要:設計了一種能夠在高溫環境下工作的小功率無刷直流電動機驅動器。驅動器邏輯部分采用高性能的單片機,開關主電路中采用特殊結構,省去了功率器件的驅動芯片,整個驅動器只需一個外部電源。驅動器具有開環調速和恒功率運行等控制功能。實驗結果表明該驅動器可在150℃高溫環境下穩定運行。
0? 引? 言
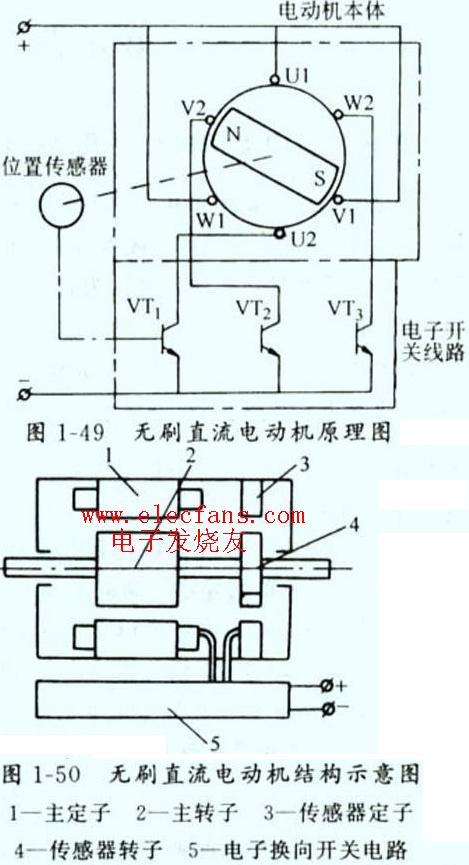
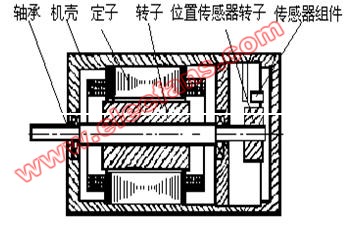
高溫電機在石油測井、航天及國防等領域有廣泛的應用,目前一般采用感應電機但感應電機存在功率因數低、損耗大、效率低,溫升高,而且速度和功率控制電路非常復雜。無刷直流電機轉子為永磁結構,轉子無電流、效率高、功率密度大、驅動電路簡單、控制方便,因而是替代高溫感應電機的理想產品。驅動電路是無刷直流電機系統適應高溫環境的關鍵,必須滿足耐高溫、可靠性高等高溫環境的要求。本文針對這些要求設計開發了一種能夠在高溫環境下工作的小功率無刷直流電動機的驅動器。該驅動器采用了高等級的軍工級器件,可驅動額定電壓為12 V、額定電流小于2 A的無刷直流電機,具有開環速度調節和恒功率運行等控制功能。驅動器的邏輯部分采用高性能的單片機;開關主電路中采用了特殊結構,從而省去了功率器件的隔離或懸浮自舉驅動芯片,大大簡化了驅動電路的結構;邏輯電路部分的電源由功率電源穩壓得到,從而使整個驅動器只需一個外部電源。對驅動器在150℃的高溫環境下進行的運行實驗證明了其運行的可靠性。
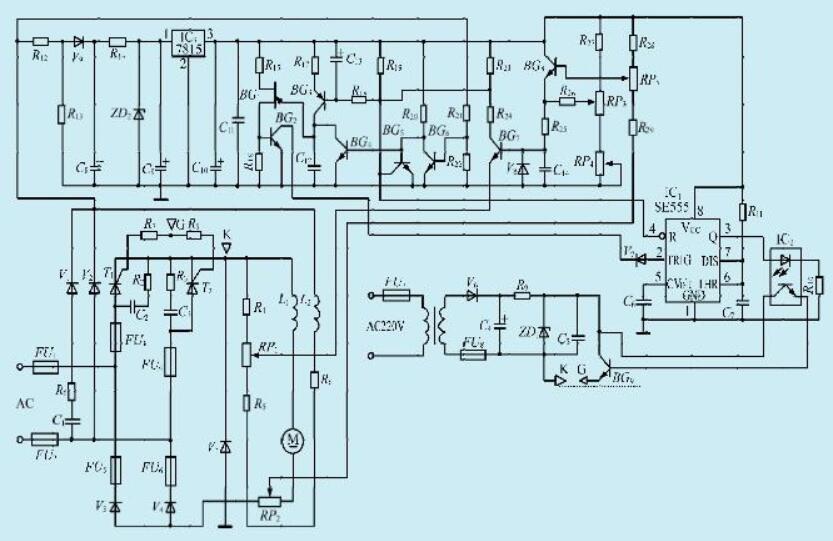
1系統硬件電路設計驅動器硬件主要包括單片機電路、開關主電路、限流保護電路等原理圖如圖1所示。

l_1單片機部分
驅動器的邏輯部分采用具有A/D轉換、PwM信號輸出功能的耐高溫單片機芯片。該部分主要完成電機轉子位置信號的采集、電動機換相邏輯信號的生成、PwM信號的生成、電機正/反轉控制和起動/停止控制等功能。
(1)換相邏輯信號產生單片機根據電機轉子位置信號給出換相邏輯信號。圖1中單片機的P1.O、P1.1、P1.2引腳連接電機轉子位置傳感器,采集轉子位置信號。P2.O、P2.1、P2.2、P2.3、P2.4、P2.5引腳為換相邏輯控制信號的輸出端。單片機通過編程把電機轉子位置信號轉換為對應的換相邏輯。電機運行時根據采集到的電機轉子位置信號HAl、HA2、HA3通過向P2口送對應控制字的方式把6路換相邏輯信號送到??? P2.0、P2.1、P2.2、P2.3、P2.4、P2.5引腳。
(2)PwM信號生成驅動器的速度調節采用脈寬調制方法,即通過改變PWM信號的占空比來控制電機電樞電壓,從而實現開環調速。該驅動器采用給單片機輸入一個可調的模擬電壓的方式來調節PWM信號的占空比。
單片機的P2.7引腳為PWM信號輸出端。
PwM信號的頻率由單片機內的寄存器PWMl值確定。PWM信號的占空比由寄存器PwM0的值確定。在單片機的一個A/D轉換輸入端P1.7引腳輸入模擬電壓信號SPCIN。該模擬電壓經單片機采樣轉換成的數字量,再送到寄存器PwM0來改變PWM信號的占空比,實現速度調節。
為了提高A/D轉換的精度,本文采用了圖2所示的PWM信號占空比給定電路。占空比給定信號不是直接接到單片機的P1.7引腳,而是中間經過一個運放電壓跟隨環節和一個Rc濾波環節。這樣的輸人電路可以為單片機內AD(:采樣電容上的殘留電壓提供快速放電通道,從而減少其對所輸入模擬信號的影響,同時圖中的Rc網絡還可以濾除輸入信號中的高頻干擾。圖中Dl、D2為5 V穩壓管,可防止輸入到A/D口的模擬信號大于單片機的工作電壓而使單片機芯片損壞。
?
(3)起動/停止控制驅動器控制電機的起動/停止是通過在P3.3引腳上輸入信號RucN實現的。當RucN為高電平時電機起動,為低電平時停止轉動。
(4)正轉/反轉控制驅動器控制電機的正、反轉是通過在P3.2引腳上輸入信號DIC:N實現的。當DI(:N為高電平時電機正轉,為低電平時反轉。
1.2開關主電路
驅動器采用了圖3所示的開關主電路。上橋臂功率管Tl、B、_r5為P溝道的MOSFET,下橋臂功率管T2T4、T6為N溝道的MOSFET。

下橋臂的N溝道MOSFET可直接由邏輯電路驅動。上橋臂的P溝道MOSFET的驅動電路由三極管和電阻構成,通過電阻分壓構造管子的驅動電壓。
以A橋臂為例,當驅動信號Q1為高電平時,三極管D1飽和導通,此時Tl管的柵極對地電壓為Dl的飽和壓降加上艘上的電壓。取R2《R1,R2上的電壓可忽略,另外Dl的飽和壓降可近似為零,因此Tl管的柵極對地電壓近似為零,Tl管柵源電壓近似為一12 V,這樣就使T1管導通。
這種開關主電路和驅動方式省去隔離或自舉驅動芯片,簡化了驅動器電路,適合于高溫環境下小功率電機驅動。
圖中Rtest為電流檢測采樣電阻。其上電壓正比于繞組電流,為限流電路提供電流采樣信號。這種電流采樣方式省去了專用電流傳感器,簡單可靠,適合與高溫環境。
1.3限流恒功率
控制電路在保持橋臂電壓不變的情況下,把電機母線電流的平均值限制在一個固定值,則電機系統的輸入輸入功率恒定,此時如果電機損耗基本不變,則電機的輸出功率也近似恒定,實現了近似恒功率運行。
恒功率運行可以保護電機本體、驅動電路以及該電機所驅動的設備。本文設計的限流控制電路由運算放大器及其外圍電路組成,如圖4所示。
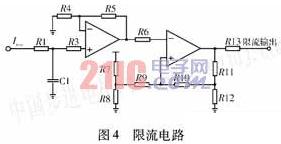
定值時比較器輸出低電平,當母線電流低于設定值時比較器輸出高電平,從而控制功率器件通斷,使母線電流平均值保持恒定,實現恒功率控制。
l_4驅動器電源
驅動器功率部分電源電壓為+12 V,邏輯電路部分器件工作電壓為+5 V。本文采用集成穩壓器7805將功率電源的+12 V穩壓后得到+5 V電壓,為邏輯電路部分的供電,從而省去了外部+5 V電源。另外電路中集成運放選用了單電源供電器件,省去了負電源,這樣整個驅動器只需一個外部電源+12 V電源,大大簡化了為驅動器供電的電源,有利于高溫環境運行。

本文選用的單片機分別設置了獨立的模擬電源引腳AV。。和數字電源引腳DV。。。為可以防止AVDD被DVDD上的數字信號噪聲干擾。本文采用了圖5所示的單片機供電電路。AVDD和DVDD之間用一個磁珠串連一個1 n電阻隔開防止干擾,同時再并聯兩個反方向的肖特基二極管,防止Av。。和DVDD之間電位差過大而使芯片損壞。
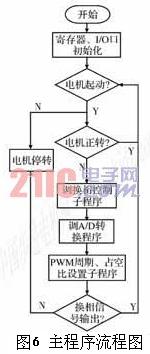
2系統軟件設計
單片機系統軟件主要由主程序、換相控制子程序、A/D轉換子程序和PwM信號設定子程序組成。主程序流程如圖6所示。
(1)換相控制子程序所設計的驅動器用于驅動三相星形聯接無刷直流電機,采用二二導通方式,6種導通狀態,轉子每轉60。變換一種狀態。單片機通過向P2口送控制的方式實現換相控制。表l是換相控制子程序中的換相控制字(正轉和反轉)。電機起動后單片機根據從P1.0、P1.1、P1.2引腳采集到電機位置信號HAl、HA2、ItA3,向P2口送相應的控制字進行換相控制。

(2)A/D轉換子程序A/D轉換子程序把P1.7引腳輸人的用于占空比給定的模擬信號進行采樣并轉換成一個12位數字量,再送入到寄存器PWM0。為了實現電機的連續調速功能,本文首先通過AD控制特殊寄存器設置AD為連續轉換模式,這樣可為PWM占空比控制寄存器提供隨占空比給定信號變化的數字量。

(3)PwM信號設定子程序。
該子程序主要功能一是設定PWM信號的頻率,二是根據A/D轉換的結果及時更新占空比設定寄存器PwM0的值,從而改變PWM信號的占空比,使驅動器具有連續調速功能。PWM定時器工作頻率為12 MHz,PwM信號頻率為4 kHz。此時寄存器PWMl的設定值為12 MHZ,4 kHz=101110111000B。
?
3實驗
本文對研制的驅動器進行了高溫環境運行的實??? 驗和限流恒功率運行實驗。
(1)高溫運行試驗把驅動器放入恒溫箱,調節恒溫箱溫度達到150℃并保持恒溫,然后起動電機,電機負載加到額定值,通過改變PwM占空比進行在一定范圍內連續調速試驗,在連續運行3小時過程中,電機及驅動器運行正常,母線電流值和相電流波形無變化。圖7是沒有限流和PwM控制時相電流的實測波形。重復以上實驗10次,電機及驅動器累計運行30小時,驅動器運行正常,器件完好。
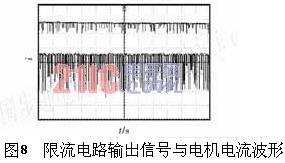
(2)限流試驗逐漸增大電機的負載轉矩,直到電機電流達到限流電路的設定值,限流電路起作用。圖8實測的限流時限流電路輸出波形和母線電流波形。上面波形為母線電流波形,下面的波形為限流電路的輸出信號波形。可以看出,母線電流被限制在一個恒定值以下,實現了恒功率運行。
4結語
(1)本文所設計的小功率高溫無刷直流電機驅動器,采用了特殊的開關主電路結構,省去了功率器件的驅動芯片;整個電路只需一個外部電源,電路結構簡單,適合高溫運行。
(2)驅動器能夠具有開環調速控制功能,同時還具有限流功能,能夠實現恒功率控制,起到保護電機及驅動器的作用。
(3)高溫實驗證明了驅動器可以在150℃的高溫環境下可靠運行。









 工商網監
工商網監
評論