 電子發(fā)燒友App
電子發(fā)燒友App


?引言
在大功率直流電源中,主電路一般采用晶閘管三相全控橋式整流電路,其關(guān)鍵在于如何準(zhǔn)確、可靠、穩(wěn)定地控制晶閘管的導(dǎo)通角。
目前,大功率直流電源現(xiàn)場應(yīng)用中最為普遍的控制方式大都采用KC或KJ系列小規(guī)模集成電路,即采用三相鋸齒波信號和直流控制信號相比較獲得的移相信號。然而,三相鋸齒波信號的斜率、占空比、幅度等與每相的器件參數(shù)密切相關(guān),并且比較信號中小的干擾可能造成較大的相移誤差,因而電路的可靠性和自動平衡能力較差。
利用單片機(jī)作為控制電路,根據(jù)三相全控橋觸發(fā)脈沖之間的邏輯關(guān)系,直接產(chǎn)生六相高度均衡的觸發(fā)脈沖,可以克服KC、KJ系列電路均衡性差的缺點(diǎn)。但是,由于現(xiàn)場系統(tǒng)工作在強(qiáng)電干擾比較嚴(yán)重的場合,為了減小干擾可能引起程序運(yùn)行紊亂,造成系統(tǒng)失控而引起主電路器件的損壞;另外,為了增強(qiáng)系統(tǒng)的功能,加強(qiáng)人機(jī)對話能力,實(shí)現(xiàn)顯示、打印、命令輸入、循環(huán)檢測、過壓過流保護(hù)以及軟件PI調(diào)節(jié)器等功能,必須采用雙CPU并行工作。但雙CPU并行工作既增加了系統(tǒng)的復(fù)雜性,又降低了系統(tǒng)的可靠性和實(shí)用性。
為了克服上述局限性,利用8098單片機(jī)作主控單元, 并充分利用WATCHDOG的抗干擾性能,采用以鎖相環(huán)(PLL)為基本控制原理的通用觸發(fā)板作中間界面,構(gòu)成一種智能化的電廠大功率直流后備電源。圖1示出控制系統(tǒng)框圖。
?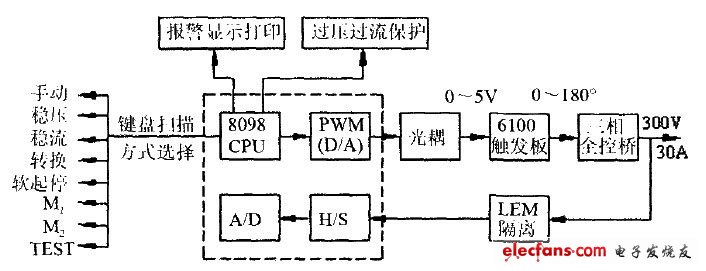
圖1 控制系統(tǒng)框圖
1 系統(tǒng)工作原理
現(xiàn)以電力系統(tǒng)對電池進(jìn)行強(qiáng)充、浮充為例,說明系統(tǒng)的工作原理。根據(jù)現(xiàn)場要求,系統(tǒng)共設(shè)有7種工作方式,見圖1。
1)手動方式(M)
系統(tǒng)工作在開環(huán)狀態(tài),利用8098的PWM口,經(jīng)濾波后輸出一個0~5V的控制電壓信號給觸發(fā)板,使整流橋相應(yīng)輸出電壓為0~300V.該方式主要用于系統(tǒng)主電路的檢修和維護(hù)。
2)穩(wěn)壓方式(V)
穩(wěn)壓方式(V)又稱浮充方式,系統(tǒng)作穩(wěn)壓源閉環(huán)運(yùn)行。
為增強(qiáng)系統(tǒng)的靈活性和通用性,利用軟件實(shí)現(xiàn)PI調(diào)節(jié)。
(1)標(biāo)準(zhǔn)數(shù)字PI算法
圖2示出帶數(shù)字PI調(diào)節(jié)器的計算機(jī)控制系統(tǒng)方框圖。
?
圖2 典型計算機(jī)控制系統(tǒng)方框圖
該數(shù)字PI調(diào)節(jié)器的Z傳遞函數(shù)為:
?
式中:Ki -- 積分系數(shù),Ki= KoT/Ti;T--采樣周期; Ti-- 積分時間常數(shù);Kp-- 比例因子;U(Z)--控制量輸出的z傳遞函數(shù);E(z)- -偏差量的z傳遞函數(shù)。
將式(1)展開,可得以下位置式算法:
?
式中Uo-- 初始值;Uk - - 第k次采樣點(diǎn)獲得的控制量;Ek--第k次采樣點(diǎn)獲得的偏差量;Ej--第j次采樣點(diǎn)的偏差值;k一第k次采樣點(diǎn)。
整理成遞推公式形式:
?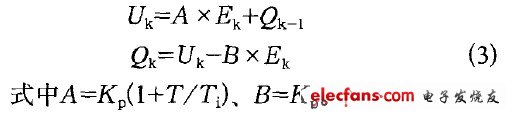
根據(jù)上述遞推公式,可以非常方便地用軟件實(shí)現(xiàn)PI調(diào)節(jié)器。
(2)改進(jìn)的數(shù)字PI算法
標(biāo)準(zhǔn)PI算法一般不能滿足現(xiàn)場要求,比如在開機(jī)、停機(jī)或大幅度改變設(shè)定值時,短時間內(nèi)系統(tǒng)偏差變化劇烈,容易造成較大的積分積累∑(Ek),使得控制輸出急劇變化,系統(tǒng)超調(diào)嚴(yán)重,動態(tài)性能惡化。
為防止這一現(xiàn)象發(fā)生,常用積分分離法、超限削弱積分法和有效偏差法對標(biāo)準(zhǔn)PI算法進(jìn)行改進(jìn),這在隨動系統(tǒng)設(shè)計中較為常見。
由于本系統(tǒng)屬于恒值控制系統(tǒng),要求有軟起和軟停功能,利用上述改進(jìn)算法已不能滿足要求。為此,采用一種新的恒偏差算法。
恒偏差法和有效偏差法相類似。有效偏差法又叫逆算法。即當(dāng)控制量Uk越限時,Uk取邊界值Umax或Umin.由該邊界值逆算出偏差值Ek'代替原來的偏差值Ek.然而,在恒偏差法中,是用經(jīng)過衰減后的Ek'去代替Ek.系統(tǒng)在階躍響應(yīng)時,實(shí)際工作在過阻尼狀態(tài),從而減緩了在起、停時對主電路器件的沖擊。圖3示出兩種算法的階躍輸入響應(yīng)曲線。其中曲線(a)標(biāo)準(zhǔn)PI算法響應(yīng)曲線、曲線(b)恒偏差法響應(yīng)曲線。
?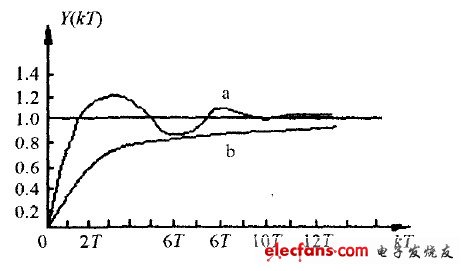
圖3 系統(tǒng)階躍響應(yīng)曲線
(3)PI參數(shù)的整定
①采樣周期T
由于主電路輸出濾波網(wǎng)絡(luò)決定了系統(tǒng)輸出紋波的最大截止頻率f,所以根據(jù)香農(nóng)(Snon)定理可以決定采樣頻率的上限f1 =2f 工程上一般取f1=10f.
由于主電路參數(shù)已知,可求得:
?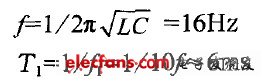
其下限T2由8098軟件執(zhí)行時間決定。若采用12M晶振,平均每條語句執(zhí)行時間為2us,程序運(yùn)行大概需要500條語句,那么T2=1ms.所以:
1ms≤ T≤6ms
最終可通過現(xiàn)場調(diào)試來選擇了1的大小。
② 比例因子Kp及積分時間常數(shù)Ti工程上常用臨界比例度法,對常數(shù)Kp和Ti進(jìn)行整定。即在閉環(huán)條件下,先暫時去掉積分作用,逐漸增大比例增益,直到閉環(huán)系統(tǒng)達(dá)到臨界穩(wěn)定狀態(tài),發(fā)生持續(xù)振蕩為止。記下此時的臨界增益Ku和振蕩周期Tu ,通過查表得到Kp=和Ti的近似值,然后由整機(jī)調(diào)試進(jìn)行修正。
本系統(tǒng)穩(wěn)壓閉環(huán)實(shí)驗測定結(jié)果為:Ku =6,Tu=12.0ms.
查表可得:Kp=0.45 x Ku=2.7、Ti=Tu÷1.2=10ms.
通過整機(jī)調(diào)試,可得出遞推公式中參數(shù)A 、B的值為:A=3、B=2.
(4)算法
為簡化程序設(shè)計,在進(jìn)行8098軟件編程時,采用無符號數(shù)算法。
3)穩(wěn)流方式(I)
穩(wěn)流方式又稱強(qiáng)充方式,系統(tǒng)作電流源閉環(huán)運(yùn)行,原理同上,不同的是積分時間常數(shù)要小一些,調(diào)節(jié)速度較快。
實(shí)驗數(shù)據(jù)如下:Tu=6.0ms,Ti=5ms、A=4,B=2.
4)穩(wěn)壓穩(wěn)流自動轉(zhuǎn)換(V/I)
當(dāng)電池虧電時,系統(tǒng)以強(qiáng)充方式工作,電池電壓逐漸升高。當(dāng)超過設(shè)定值時,改為浮充方式。
即系統(tǒng)能根據(jù)負(fù)載情況自動選擇充電模式。圖4示出典型的二階段充電曲線。
?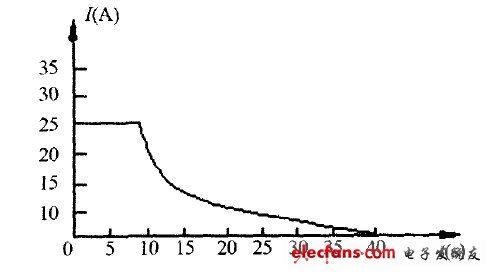
圖4 蓄電池二階段充電曲線
5)工作方式記憶(M1.M2)
系統(tǒng)可存儲兩組常用數(shù)據(jù),即工作方式、電壓電流給定值、穩(wěn)壓穩(wěn)流轉(zhuǎn)換值、過壓過流值。
掉電時還能保護(hù)當(dāng)前的工作記錄。
6)軟起、軟停方式(SS)
按下該鍵,系統(tǒng)工作在軟停方式。觸發(fā)板將控制脈沖相位拉至最大,然后封鎖脈沖輸出。該鍵彈起,為軟起方式。控制輸出由最小慢慢升至給定值。
7)電池檢測方式(TEST)
系統(tǒng)能循環(huán)檢測電池電壓,由數(shù)碼管進(jìn)行顯示,也可通過串行口打印輸出,并有報警提示。
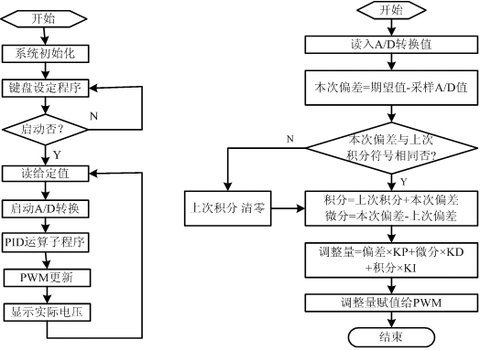
2 系統(tǒng)工作流程圖
系統(tǒng)上電后,首先對單片機(jī)的外圍接口進(jìn)行檢查,以確保人機(jī)對話通道暢通。然后發(fā)出開機(jī)信號,對LED、給定寄存器等進(jìn)行復(fù)位,隨后產(chǎn)生頻率為2Hz的方波信號,作為系統(tǒng)的給定輸入。
為進(jìn)入上述7種工作方式,系統(tǒng)共設(shè)有三種途徑。
途徑I為掉電重起方式。即系統(tǒng)在掉電后,能記錄當(dāng)前工作方式,來電后直接返回到原狀態(tài)。
該途徑為系統(tǒng)正常工作時的進(jìn)入通道。
途徑II、III一般作調(diào)試用。途徑II是通過M 、M,進(jìn)入相應(yīng)的工作方式,而用戶在設(shè)置給定值、轉(zhuǎn)換值和保護(hù)值時要用到途徑III.
系統(tǒng)進(jìn)入相應(yīng)工作方式后,可通過中斷方式接受用戶命令,更換當(dāng)前工作狀態(tài)(中斷程序框圖省略)。圖5示出系統(tǒng)工作流程圖。
?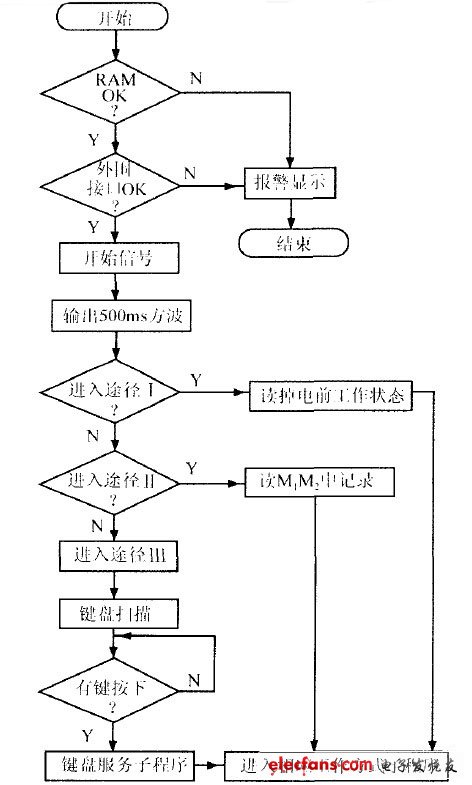
圖5 系統(tǒng)工作流程圖
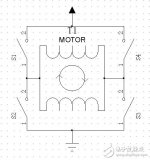
3 通用觸發(fā)板簡介
晶閘管通用觸發(fā)板是以40芯CMOS大規(guī)模集成電路為核心,利用鎖相環(huán)控制技術(shù)(PLL),根據(jù)壓控振蕩器(VCO)鎖定的三相同步信號間的邏輯關(guān)系設(shè)計出的一種晶閘管觸發(fā)系統(tǒng)。給定0~5V的直流控制信號,便能產(chǎn)生0°~180°移相范圍的三相、六相或十二相強(qiáng)觸發(fā)脈沖。由于采用上述新技術(shù),克服了KC、KJ系列同類產(chǎn)品的諸多缺點(diǎn),使該觸發(fā)板輸出的控制脈沖具有高對稱性、高均衡性。另外,該板的抗干擾能力和多種附加功能也大大強(qiáng)化了該板的實(shí)用性, 因而具有極高的性能價格比,適用于各種整流、逆變、交流側(cè)原邊控制等大功率晶閘管控制電路。
該觸發(fā)板無需同步變壓器,具有相序自動測控核對能力,并具備缺相保護(hù)功能和脈沖禁止接口;通過撥碼開關(guān)可提供雙30°、120°寬的高頻調(diào)制觸發(fā)脈沖。實(shí)驗證明,該脈沖可直接驅(qū)動1000A以上的晶閘管,是現(xiàn)場應(yīng)用中晶閘管觸發(fā)系統(tǒng)的理想產(chǎn)品。
4 結(jié)束語
該系統(tǒng)的特點(diǎn)在于軟件PI調(diào)節(jié)器的靈活應(yīng)用。一方面,可就多種PI算法進(jìn)行綜合比較,并驗證一些新的算法。另一方面,基于系統(tǒng)的通用性,可就不同的被控對象給出不同的控制模式和參數(shù)。例如100A和500A時的蓄電池,就要有不同的PI調(diào)節(jié)參數(shù);既使容量相同而生產(chǎn)廠家不同,所要求的參數(shù)也不一致,這是由電池內(nèi)部化學(xué)反應(yīng)速度決定的。
系統(tǒng)的另一個特點(diǎn)是通用觸發(fā)板的使用。它介于計算機(jī)PI調(diào)節(jié)器與晶閘管主電路之間,作為一個很好的緩沖界面,能保證調(diào)節(jié)失控時系統(tǒng)的安全可靠。另一方面,8098單片機(jī)的WATCHDOG也強(qiáng)化了系統(tǒng)的抗干擾能力,使得該系統(tǒng)非常適用于現(xiàn)場控制。

















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論