 電子發(fā)燒友App
電子發(fā)燒友App


?
大多數(shù)的現(xiàn)代電源都要求從輸入線路所吸收的電流包含諧波含量。實際上,規(guī)范標(biāo)準(zhǔn)要求線路電流接近正弦波形,而且相位與線路電壓同相。為此,通常在橋電路與大電容之間插入所謂的PFC預(yù)穩(wěn)壓器。這個中間段設(shè)計輸出恒定的直流電壓,同時從輸入線路吸收正弦電流。PFC段通常采用升壓配置,要求輸出電壓比線路可能最高的電壓電平都要高。這就是為什么歐洲或是通用主電源輸入條件下輸出穩(wěn)壓電平普遍設(shè)定在約390V的原因。
對于較低功率的應(yīng)用而言,臨界導(dǎo)電模式(CrM)(也稱作邊界、邊界線甚至是瞬態(tài)導(dǎo)電模式)通常是首選的控制技術(shù)。本文將說明解決這種問題的方法。PFC段一個更加常見的問題是通常發(fā)生在啟動時的大電流過沖,而不論采用的是何種控制技術(shù)。
臨界導(dǎo)電模式工作
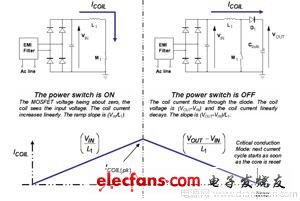
臨界導(dǎo)電模式(CrM)工作是低功率應(yīng)用中最常見的解決方案。這種控制方法可以采用可變頻率控制原理來描述特征,即電感電流先上升至所需線路電流的2倍,然后下降至零,接著再上升至正電流,期間沒有死區(qū)時間(dead-time),如圖1所示。這種控制方法需要電路精確地檢測電感的磁芯復(fù)位。
?
圖1 臨界導(dǎo)電模式工作
零電流檢測
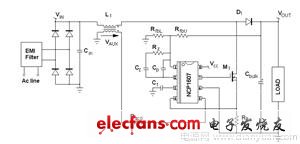
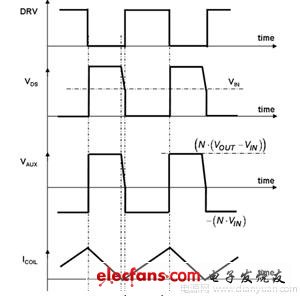
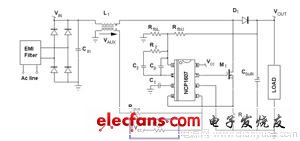
確定退磁完成的常見解決方案在于感測電感電壓,更具體地說,就是檢測電感電壓何時降至零。監(jiān)測線圈電壓并非經(jīng)濟(jì)的解決方案。相反,這升壓電感與小型繞組相關(guān),這繞組(稱作“零電壓檢測器”或ZCD繞組)提供了電感電壓的一個縮小版本,能夠用于控制器上,如圖2所示。ZCD繞組采用耦合形式,因而它在MOSFET導(dǎo)電時間(反激配置)期間呈現(xiàn)出負(fù)電壓,如圖3中所示。這繞組提供:
VAUX=-NVIN,當(dāng)MOSFET導(dǎo)通時;
VAUX=N(VOUT-VIN),當(dāng)MOSFET開路時。
其中,N是輔助繞組與主繞組之間的匝數(shù)比。
?
圖2 NCP1607驅(qū)動的應(yīng)用段典型應(yīng)用示意圖
當(dāng)ZCD電壓(VAUX)開始下降時線圈電流會達(dá)到零。許多CrM控制器內(nèi)部比較VAUX與接近0V的ZCD參考電壓,檢測出下降沿,并準(zhǔn)時啟動下一個驅(qū)動信號。為了實現(xiàn)強固的工作,應(yīng)用了磁滯機(jī)制,并實際上產(chǎn)生較高的(upper)閾值(VAUX上升時有效)及較低的(lower)閾值(VAUX下降時有效)。出于不同原因(如安森美半導(dǎo)體NCP1607 PFC控制器中的ZCD引腳的多功能性),在大多數(shù)商用器件中這些閾值都相對較高(在1V及2V之間)。
例如,NCP1607數(shù)據(jù)表中可以發(fā)現(xiàn)下述的ZCD閾值規(guī)范(引腳5是監(jiān)測ZCD信號的電路)。
Vpin5上升:最低值為2.1V,典型值為2.3V,最大值為2.5V;
Vpin5下降:最低值為1.5V,典型值為1.6V,最大值為1.8V。
要恰當(dāng)?shù)貦z測零電流,VAUX信號必須高于較高的閾值。
?
圖3 波形
極高輸入線路時的不精確零電流檢測
圖4及圖5顯示出在高線路時會面對的一個問題。VAUX電壓在退磁相位期間較小,而這時Vin較高,因為VAUX與輸出輸入電壓差成正比VAUX=N(VOUT-VIN)。此外,如圖4所示,輸入電壓在開關(guān)頻率呈現(xiàn)出交流含量。因此,VAUX波形并不平坦,相反,它還包含紋波。在低線路時,這紋波可以忽略不計。在高線路時,VAUX幅度在退磁相位期間較小。因此,這些振蕩可能大到足以導(dǎo)致過早檢測電感磁芯復(fù)位。事實上,如圖4和圖5所示的那樣,零電流檢測的精度降低了。
?
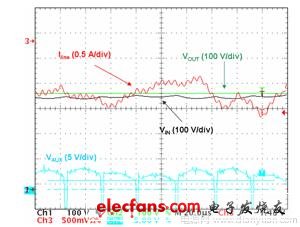
圖4 不精確零電流檢測導(dǎo)致的不穩(wěn)定性
?
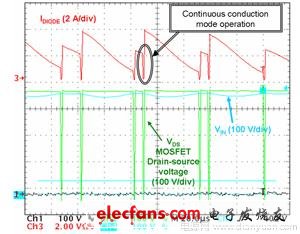
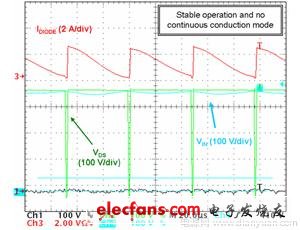
圖5 連續(xù)導(dǎo)電模式工作
圖4顯示出現(xiàn)不穩(wěn)定性問題時高輸入線路(正弦波頂端,此處Vin約為380V)下的VAUX電壓。我們可以看到MOSFET關(guān)閉時,VAUX電壓輕微躍升至高于ZCD閾值。由于其大紋波的緣故,在退磁相位期間,VAUX電壓首先增加,然后下降。由于在某些開關(guān)周期的末段VAUX接近ZCD閾值,這VAUX電壓下降導(dǎo)致零電壓比較器在電感磁芯完全復(fù)位前就翻轉(zhuǎn)(trip)。圖5證實了這一論斷。有時,升壓二極管仍在導(dǎo)電時,PFC段開始新的周期。這個現(xiàn)象主要導(dǎo)致線路電流失真(見紅色跡線)、功率因數(shù)退化,并可能有一些頻率處在人耳可聽到的噪聲。
改善高線路工作的簡單調(diào)整方法
如圖6所示,在VCC與引腳5(ZCD引腳)之間布設(shè)一顆電阻,能夠減輕或抑制這個現(xiàn)象。這樣一來,ZCD引腳上就產(chǎn)生了偏置。
?
圖6 ZCD引腳上的調(diào)整
在測試的應(yīng)用中,VCC為15V,且Rzcd=68kΩ。在VCC與引腳5之間增加一顆電阻Roff=680kΩ,就改變了施加在引腳5(ZCD引腳)上的電壓。退磁相位期間ZCD引腳上施加的實際VAUX電壓就變?yōu)椋?/p>
(1)
?
然后,施加在引腳5上的電壓就偏置。事實上,這就像是VAUX電壓與減小了1.36V的ZCD閾值比較。這樣一來,新的實際ZCD閾值就是:
Vpin5上升:最低值為0.74V,典型值為0.94V,最大值為1.14V;
Vpin5下降:最低值為0.14V,典型值為0.24V,最大值為0.44V。
這些降低的ZCD閾值增加了ZCD的精度,并能抑制CCM工作,在相同條件下獲得的波特圖(見圖7)就證實了這一點。
?
圖7 調(diào)整改善器件工作
必須注意,Vpin5下降(我們的案例中是1.5V)時,偏置必須保持在低于ZCD最低閾值。這是為了確保新的實際ZCD閾值(Vpin5下降時) 保持高于0V。否則,系統(tǒng)可能難于檢測磁芯復(fù)位并因此啟動新的開關(guān)序列。出于這個目的,應(yīng)當(dāng)考慮到VCC的變化。
啟動時的大過沖
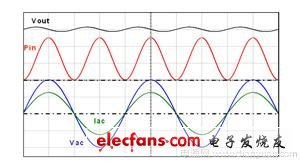
PFC段從輸入線路正弦波電壓源吸收正弦電流,因此,它們?yōu)樨?fù)載提供僅匹配平均需求的方波正弦功率。輸出電容(大電容)“吸收”實際提供的功率與負(fù)載消耗的功率之差值。
● 饋送給負(fù)載的功率低于需求時,輸出電容放電,補償功率差額。
● 提供的功率超過負(fù)載功耗時,輸出電容充電,存儲多余的能量。
因此,輸出電壓呈現(xiàn)出輸入線路頻率2倍的低頻交流含量。不利的是,PFC電流整形(current-shaping)方法均基于控制信號無紋波的假設(shè)。否則,就不能夠優(yōu)化功率因數(shù),因為輸入線路電流重新復(fù)制了控制信號失真。這就是眾所周知的PFC電路動態(tài)性能差的原因。它們的穩(wěn)壓環(huán)路帶寬設(shè)得極低,從而抑制100Hz或120Hz紋波,否則輸出電壓就會注入這紋波。
由于系統(tǒng)極慢,PFC段遭受陡峭的負(fù)載或輸入電壓變化時,會在大電容上呈現(xiàn)出大的過沖(over-shoot)或欠沖(under-shoot)。啟動序列就是這些瞬態(tài)中的一種,能夠產(chǎn)生大的電壓過應(yīng)力(over-stress)。
?
圖8 輸出電壓紋波
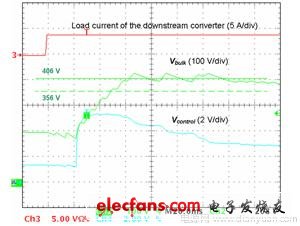
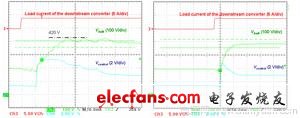
圖9展示能在啟動相位期間觀察到的那類過沖。這波特圖是使用由NCP1607驅(qū)動、負(fù)載是下行轉(zhuǎn)換器的PFC段獲得的。
?
圖9 啟動相位期間的過沖
承受啟動過沖
應(yīng)用軟啟動是減小過沖的一種自然選擇。然而,設(shè)計人員所選擇的控制器并不必須具有這個功能特性。此外,從定義來看,這種功能減緩了啟動速度,而這并非總是可以接受。
另外一種簡單的選擇涉及在反饋感測電阻分壓器處增加一個電容,如圖10所示。在這個圖中,我們假定感測網(wǎng)絡(luò)中上部的電阻分割為兩個電阻,而電容Cfb并聯(lián)連接在其中一個電阻的兩端。

?
圖10 小幅調(diào)整反饋網(wǎng)絡(luò)
如果控制電路中嵌入了傳統(tǒng)的誤差放大器,讓我們分析電容Cfb的影響。在穩(wěn)態(tài),Cfb改變了傳遞函數(shù)。通過檢測,我們立即注意到它增加了:
處于下述頻率的一個零點:
(2)
?
處于下述頻率的一個極點:
(3)
?
控制器集成了傳導(dǎo)誤差放大器(OTA)時,情況就有點不同。這是因為反饋引腳(誤差放大器的反相輸入)不再是虛接地(virtual ground)。因此,電阻分壓器中下部位置的電阻(RfbL)影響了極點頻率的表達(dá)式。實際上,采用OTA時:

(4)
?
然而,PFC輸出電壓的穩(wěn)壓電平通常處于390V范圍,而控制器參考電壓處在少數(shù)幾伏的范圍。因此,與(RfbU1+RfbU2)相比,RfbL極小;如果RfbU1與RfbU2處在相同范圍,或如果RfbU1小于RfbU2,我們就可以考慮:RfbL=RfbU2。事實上,設(shè)計人員基于這些考慮因素,能夠得出近似Cfb產(chǎn)生的極點頻率,即:
(5)
?
最后,兩種配置中都獲得相同的極點。
這些條件(RfbU1≈RfbU2)或(RfbU1≤RfbU2)并非限制性條件。相反,滿足這些條件是明智之舉,因為RfbU1兩端的電壓及相應(yīng)的Cfb兩端的電壓取決于RfbU1值與(RfbU1+RfbU2+RfbL)總電阻值的相對比較關(guān)系。這就是為什么它們是現(xiàn)實可行的原因。
如果RfbU1與RfbU2這兩個電阻擁有類似阻值,
(6)
?
如果RfbL=RfbU2:
(7)
?
最后,如果與RfbU2相比RfbU1極小,我們就獲得在控制至輸出傳遞函數(shù)中抵消(cancel)的極點和零點。這樣,增加Cfb就對環(huán)路和交越頻率沒有影響。如果RfbU1與RfbU2處在相同范圍,低頻增益就略微增加,交越頻率就以跟fp與fz的相同比率增加。事實上,特別是在RfbL=RfbU2時,這個增加的電容并不會大幅改變PFC段的動態(tài)性能。
然而,在啟動相位期間,這個電容發(fā)揮重要作用。當(dāng)輸出電壓上升時,Cfb電容也充電。Cfb充電電流增加到反饋電流中,所以穩(wěn)壓電平臨時降低。這增加的電流與Cfb電容值成正比,并取決于輸出電壓的陡峭度,因此,在輸出電壓快速充電時,這個影響更引人注目。
實際驗證
在應(yīng)用中已經(jīng)測試了調(diào)整方法,反饋網(wǎng)絡(luò)如下所示:
RfbU1≈RfbU2=470kΩ
RfbL=6.2kΩ
電阻RfbU1兩端放置了一個100nF電容。它必須是一種高壓電容,因為若我們假定輸出電壓最大值為450V,它兩端的電壓可能達(dá)到223V。作為一項經(jīng)驗法則(rule of the thumb),我們選擇了100nF電容值,這樣,在觀測到過沖時,時間常數(shù)(RfbU1Cfb)就處在啟動時間的范圍之內(nèi)。
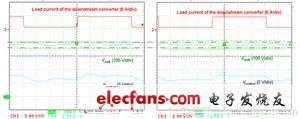
圖11比較沒有時的啟動序列(左圖)與有Cfb時的啟動相位(右圖)。這些波特圖清楚顯示電容的影響。Cfb充電電流人為地增加了輸出電壓(即圖中的Vbulk)充電期間的反饋電流,導(dǎo)致預(yù)期的控制信號(Vcontrol)放電。因此就沒有觀測到輸出電壓過沖。我們可進(jìn)一步指明,啟動時間未受明顯影響。
?
圖11 有Cfb(左圖)及沒有Cfb(右圖)時的啟動特性
圖12顯示了沒有Cfb時(左圖)及有Cfb時(右圖)PFC段對突兀的負(fù)載改變(120W階躍)的響應(yīng)。我們的案例中(RfbU1=RfbU2),Cfb產(chǎn)生并不會相互抵消的額外極點及額外零點,且輕微改變環(huán)路特性。然而,最重要的是,采用Cfb還是改善了響應(yīng),因為較大的輸出偏差(Output deviation)使這些負(fù)載階躍類似于啟動瞬態(tài)。因此,Cfb在這里同樣幫助控制電路出現(xiàn)預(yù)料中的所期望的電平恢復(fù)。
?
圖12 沒有Cfb時(左圖)及有Cfb時(右圖)PFC段對負(fù)載階躍變化的響應(yīng)
結(jié)論
本文討論了如何解決PFC段經(jīng)常會面對的兩個問題。首先,在CrM應(yīng)用中,零電流檢測在高輸入線路時精度不高,而當(dāng)輸入線路電壓非常接近輸出電壓時,可能會出現(xiàn)某些不需要的連續(xù)導(dǎo)電模式周期,導(dǎo)致一些功率因數(shù)退化,及可能出現(xiàn)一些人耳可聽到的噪聲。能夠使用一顆簡單的電阻來改善這功能。其次,在啟動序列期間,PFC段也可能呈現(xiàn)出過大的過沖。可以在反饋感測網(wǎng)絡(luò)中放置一顆電容來限制或抑制這過應(yīng)力。即便是在電源設(shè)計的極晚階段,這兩種調(diào)整方法都易于實施。










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論