 電子發燒友App
電子發燒友App


摘要: 針對油田無線示功儀及其無線網絡節點的供電問題,采用開關電源技術實現了太陽能組件電壓變化或負載波動時自動調節占空比的供電網絡,運用自動控制技術設計了過電壓保護電路、過放電保護電路與應急充電電路等, 采用充電管理技術實現了鋰電池充電及電壓調節電路,根據光敏傳感器輸出差值比較電壓設計了太陽自動跟蹤控制器。 該太陽能充電電路思路新穎,在應用上是一種突破,工作效率達到92% ,輸出電壓精度為98% ,系統運行一年來,工作性能安全、穩定。 應用證明具有較高的實用和推廣價值。
隨著無線技術的發展,無線網絡技術越來越多投入到實際應用中, 無線傳感器網絡一般分布范圍較廣,架設供電線路,投資大,維護成本高。 如采取干電池方式供電,則每個節點的電源供電能力有限,對每個節點更換電池不僅費時、費力,增加成本,而且影響工作效率。 能否穩定持續的供電,成為制約油田無線示功儀及其無線網絡發展的一個重要因素,太陽能技術的發展使供電方式產生了飛躍式的發展,已經成為油田無線示功儀及其中繼網絡節點供電方式的發展方向。 本文擬對油田監測示功儀及中繼網絡節點設計一種智能化、免維護型的太陽能充電電路,為無線網絡節點供電。 該設計電路具有以下特點: ①基于開關電源技術設計的充電網絡具有自動調節占空比的功能, 具有很寬的輸入電壓范圍。 ②采用線性電源管理芯片,用先預充2恒流2恒壓的充電方式完成整個充電過程。 ③采用低噪聲、高速度的CMOS 型電壓調節器,具有高精度的恒壓、恒流輸出。 ④充電過壓保護、鋰電池過放電保護功能,使鋰電池充、放電安全可靠。 ⑤自動跟蹤太陽的功能,太陽能采集板始終保持對準太陽,充分利用太陽能。
1 系統設計
現有的光伏電池,單體的輸出電壓都很低(在1V 以下) ,本設計中,將多個光伏電池相串聯,組成太陽能組件。 通過可以自動調節占空比的供電網絡保證在光照強度變化和負載變化時,輸出電壓基本穩定,為充電管理芯片提供穩定的電壓輸入。 通過對供電網絡的副邊電壓監測,保護充電管理芯片不因電壓過高而損壞。 通過對電池兩端的電壓監測,保證鋰電池不會因過放電而損壞。 由于無線示功儀及其中繼網絡節點的供電要求是313V,采用低噪聲、高速度的CMOS型電壓調節器。 在自動跟蹤控制器作用下,始終保持全天候跟蹤太陽。 為了防止因連續陰雨天而導致的太陽能供電不足,設計應急充電電路,充電期間,無線示功儀及其節點正常運行。 具體系統設計模塊如圖1所示。
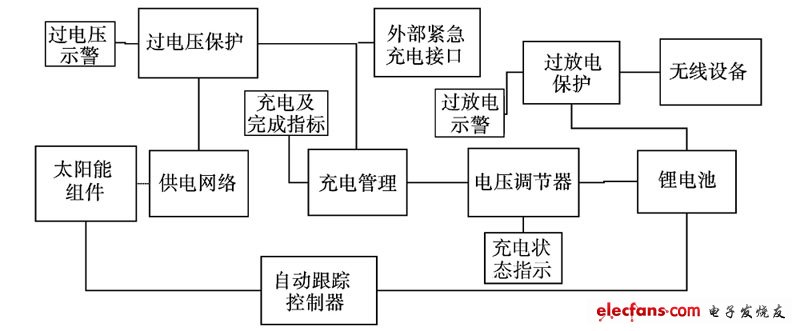
圖1 系統設計示意圖
2 硬件電路設計
2.1 太陽能組件及充電電路設計
本文設計中采用16個光伏電池串聯,組成電壓約為1218V 的太陽能組件,通過采集較高多的光能,保證日照能夠使鋰電池完全充滿電。 供電網絡設計電路采用正激式拓撲結構[ 1 ] 。 具體電路如圖2所示。
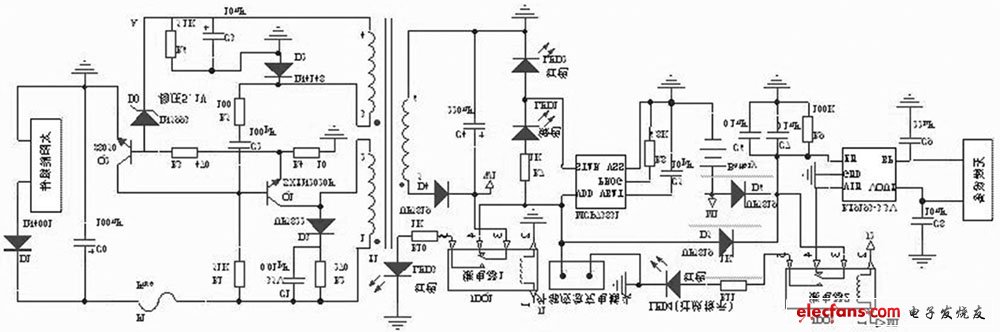
圖2 智能型太陽能充電電路設計主電路
太陽能組件產生的電能,一路經過開關變壓器T1 的122繞組加至開關管Q1 的集電極( c) ,另一路經過R1 為Q1 提供基極電壓。 當基極( b)的電壓為高電平時, Q1 開始導通,變壓器T1 的122繞組中產生1正2 負的電動勢,經T1 耦合,在T1 的324繞組中產生3正4負的感應電動勢,此電動勢經R5 , C2 疊加到Q1的基極( b) ,使Q1 迅速飽和導通。 由于變壓器T1 的122間的電流不能突變,在此過程中會產生1負2正的電動勢。 變壓器T1 的324繞組中感應出3負4正的電動勢,通過R5 , C2 ,使Q1 迅速進入截止狀態。 經R1 對C2 的不斷充電, Q1 又開始導通,進入下一輪的開關振蕩狀態。 在導通期間, T1 變壓器的副邊繞組526,經整流二極管D4 向外輸送能量。
穩壓電路由穩壓管D0、三極管Q2 等元件組成。 當負載減輕或太陽能組件輸出電壓升高時, A 點電壓上升。 當該電壓大于511V 時, D0 擊穿, Q2 因b2e結正向偏置而迅速導通,使Q1 提前截止,從而使輸出電壓趨于下降;反之,則控制過程相反,從而使變壓器T1 副邊輸出電壓基本穩定。 當負載過重時, Q1 的c2e電流增大, R4 上的壓降也隨之增大。 當該電壓大于017V 時, Q2 導通, Q1 截止,達到過流保護的目的。 為避免截止期間變壓器T1 的122 繞組感應出的尖峰脈沖擊穿開關管Q1 ,并聯了尖峰脈沖吸收電路。
2.2 過電壓保護控制
過電壓保護控制,具體電路如圖3所示:整流二極管D4 接過電壓保護繼電器JDQ1輸出。 充電控制管理芯片MCP73831最大輸入電壓為6V. 雖然供電網絡基本輸出電壓為5V,但當光照強度發生劇烈變化或負載變化較大時,輸出電壓仍然會有一定波動,為保護MCP73831不因短時的電壓波動而損壞,設計了過電壓保護控制器。 當W1 的電壓超過6V, JDQ 1會斷開輸出電路,MCP73831因斷電而得到保護。 具體分析如下:此部分電路設計主要采用了LM 2903電壓比較器和外圍電路擴展而成。 LM 2903包含兩路比較器,1, 2, 3腳為一路, 1腳為OU TPU TA, 2, 3腳為IN PU TA. 5, 6, 7腳為另一路, 7腳為OU TPU TB, 5, 6腳為IN PU TB. 其中過電壓保護控制器用5, 6, 7腳的比較器。電阻R11 , R13分壓后接至比較器的5腳。 當電壓大于6V 即分壓值大于214V. 比較器的7腳輸出電平由低轉為高。 Q3 飽和導通,則Q5 截止,安全工作指示燈熄滅,接點J1為高電平,此時JDQ 1開始工作,供電電路與后續電路斷開,同時過電壓紅色警示燈亮起。
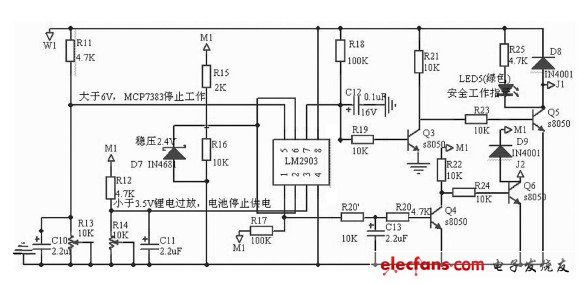
圖3 過電壓與過放電保護控制電路
2.3 過放電保護控制
當鋰電池電壓低于315V 時,即電池電量釋放92%以上時,認為不能繼續放電,否則鋰電池內部介質會發生變化,致使充電特性變壞,容量降低等。 為此設計過放電保護控制電路,此電路的具體設計如圖3,分析如下:采用了LM 2903的1, 2, 3腳組成的一路比較器,與外圍器件構成過放電壓比較器, R12 , R14分壓后接至LM 2093的3腳。 當電壓值小于315V 時,分壓值小于214V, LM 2903的1腳由高電平轉變為低電平, Q4 由導通轉變為截止狀態, Q6 飽和導通, JDQ2工作,同時過放紅色指示燈亮。
2.4 自動跟蹤控制器
控制器的輸入端,光敏傳感器分別由兩只光敏電阻串聯交叉組合而成。 每一組兩只光敏電阻中的一只為比較器的上偏置電阻,另一只為下偏置電阻。 一只檢測太陽光照,另一只則檢測環境光照,送至比較器輸入端的比較電平始終為兩者光照之差。 具體電路如圖4所示:光敏電阻RT1 , RT2 與電位器R27和光敏電阻RT3 , RT4 與電位器R28分別構成光敏傳感電路。 將RT1 和RT3 安裝在垂直遮陽板的一側, RT4 和RT2安裝在另一側。 當RT1 , RT2 , RT3 和RT4 同時受環境自然光線作用時, R27和R28的中心點電壓不變。 當只有RT1 , RT3 受太陽光照射, RT1 的內阻減小, LM 2903 的5 腳電位升高, 7 腳輸出高電平, 三極管Q7 導通,JDQ 4工作,其觸點3, 5閉合。 同時RT3 內阻減小, LM 2903的3腳電位下降, JDQ 5不工作,電機M 正轉;當只有RT2 , RT4 受太陽光照射,同理,電機M 反轉。 當轉到垂直遮陽板兩側的光照度相同時, JDQ 4, JDQ 5都導通,電機M 才停轉。 在太陽不停地偏移過程中,垂直遮陽板兩側光照度的強弱不斷地交替變化,電機不停的運動,使太陽能接收裝置始終面朝太陽。
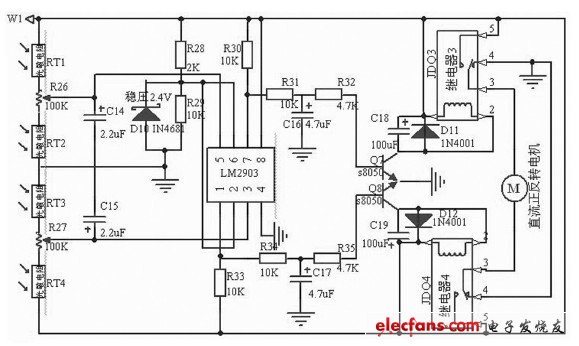
圖4 自動跟蹤控制器
2.5 充電管理電路設計
鋰電池的充電過程一般分為3個階段: ①涓流充電階段。 ②恒流充電階段。 一般可以充電到電池容量的85%左右。 ③恒壓充電階段。鋰電池過充,輕則減少電池壽命,性能變壞,重則產生漏液等。在本文的設計中,采用了線性充電管理芯片MCP73831,如圖1所示。 該芯片具有輸出電壓準確,任意設定充電電流,自動轉換充電模式,消耗電流極小(25uA ) ,過充監測保護等功能和特點。 MCP73831各管腳的功能:
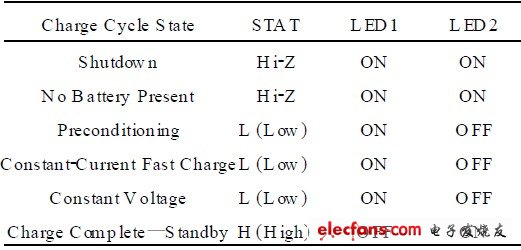
VDD 為輸入電壓端; VSS 為參考零電壓端; VBA T為充電控制輸出端; STA T 為充電狀態輸出端。 PROG為電流設定與充電控制使能端。 鋰電池充電時,充電管理芯片MCP73831的PROG 接口須外接電阻到VSS,具體計算公式: IREG = 1000 (V ) /RPROG其中RPROG的單位為kΩ, IREG的單位為mA. 在本文設計中RPROG = 2kΩ。
則IREG = 500mA. STA T的各接口狀態及電路設計中指示燈的邏輯關系如表1所示。 充電管理芯片MCP73831通過檢測鋰電池的BA T引腳來判斷電池的各個狀態,從而對電池進行充電管理。 不發生過電壓保護時,供電網絡一方面對MCP73831提供5V 電壓。 一方面通過D 5傳輸到JDQ2對后續電路供電。 應急充電時,外接5V 電源,一路通過D5到繼電器JDQ 2. 另一路到達MCP73831對鋰電池充電。 D5 陰極端輸出電壓5(V ) - 017 (V ) = 413 (V ) ,由于鋰電池的電壓在充滿或非充滿電狀態的時候,都低于D6 陰極輸出端電壓(D5 , D6 共陰極) , 所以在應急充電的過程中, RT9193正常工作。 在CMOS ( comp lem entary m etal2oxidesem iconducto r)型電壓調節器RT9193的B P端和地之間連接一個22nF的電容,可以極大的減少調節器的輸出噪聲。在常溫狀態下,充電完成時電壓412V 的鋰電池, 消耗了90%的電量時候, 電壓仍然會保持315V. 本文設計中選用電壓調節器RT9193,即使314V 的時候,輸出電壓仍然可以穩定在313V。
表1MCP73831電路設計中指示燈的邏輯關系
3 試驗數據及結果分析
在調試中, 采用模塊化測試的方法, 最后進行聯合調試。 對供電網絡進行測試,選用可調電源,調節輸入電壓,輸出電壓及試驗數據如表2所示。 通過應急充電接口接入標準5V 電壓,斷開RT9193,對進行測試時,沒有連接二極管D5 , D6 ,發現MCP73831的指示燈指示不正確。 分析發現, 不連接二極管D5 , D6 , 相當于RT9193直接連接在BA T引腳輸出,在MCP73831上電的瞬間, 要檢測BA T的狀態, RT9193的輸入引腳及支路連接到鋰電池的正極,直接影響到了MCP73831對BA T引腳的檢測狀態,致使充電進入涓流充電階段。 增加D5 , D6后,再進行試驗,指示燈符合邏輯要求。 測試輸出電流為最大為485mA,充電電壓達到412V 時,綠色指示燈熄滅,紅色指示燈亮起,完成對鋰電池的充電。 W1 接入0~10V 可調節電壓源(初始值設為5V ) ,M1 接入0~5V 可調節電壓源(初始值設為4V ) ,調節滑動變阻器R13 , R14. 使W 1輸入電壓6V 時LM 2903的7腳由低電平轉為高電平。 測量此時滑動電阻器R13 = 3115kΩ, 固定此電阻值。 M1 輸入電壓315V 時LM 2903的1腳由高電平轉為低電平,測量此時滑動變阻器R14 = 1kΩ,固定此電阻值。 此時發現LM 2903的1腳輸出處于臨界值,不停的在高低電平之間變換,繼電器JDQ2不停的通斷, 減少了JDQ2的使用壽命,極易損壞無線示功儀及無線網絡設備, 對無線設備的壽命影響也極大。 分析發現:在過放電保護過程中,檢測值和比較值如果達到基本一致的狀態,則會產生臨界保護。 為此在電阻R20與R′20之間接電解電容C13 ,通過對電容的充放電,延遲了Q4 的關斷時間,增加了開啟和關斷的時間間隔,電容的大小決定了時間間隔的長短。 該時間即為過放保護控制器的保護延時時間。 設計選用212μF電容,測試發現延時15s左右。
自動跟蹤控器調試,調試時W1 接5V 電源,用一只100W 燈泡照射RT1 與RT3 并移動燈光,可以發現太陽能采集板跟著燈光運動。 但穩定狀態時電機不停震動, 此時通過在電阻R31與電阻R32之間增加一個417uF電容,延遲電機啟動、停止時間。 經測試發現延時時間40s左右,相對太陽照射時間來說,此時間可以忽略不計,不影響跟蹤功能。 同理在電阻R34與電阻R35之間增加一個417μF電容。 經測試發現:可以完全消除電機震動現象且跟蹤效果良好。 各部分獨立調試完成后對供電網絡和充電管理芯片MCP73831進行聯調,然后增加RT9193進行調試, 最后實現整個系統的調試。 經測試證明, 實現了設計目標和功能要求。
4 結語
此智能型太陽能充電電路,具有工作性能穩定,運行安全可靠、低損耗,高效率、結構簡單,輸出電壓精度高等優點。 自動調節占空比的供電網絡與電源管理芯片的相結合,過壓與過放電保護,自動跟蹤太陽等功能是比較有創造性的設計方式,特別是將這些設計應用到油田無線示功儀和無線網絡節點中,是一種嶄新的嘗試,也是應用上的突破。 目前本文所設計開發的太陽能充電及自動跟蹤電路已經成功應用于江蘇油田無線示功儀及其無線通訊網絡中。 實踐證明該系統充電速度快, 效率較高, 可以實時跟蹤太陽, 工作穩定,維護量少。 具有較高的實用及推廣價值。







 工商網監
工商網監
評論