 電子發(fā)燒友App
電子發(fā)燒友App


由于大部分汽車HID燈是交流燈,因此電子鎮(zhèn)流器必須提供交流電流和交流電壓。大多數(shù)兩級式的電子鎮(zhèn)流器均采用逆變電路作為輸出級。
為了抑制HID燈,特別是短弧金屬鹵化物燈的聲共振問題,經(jīng)常采用低頻交流方波供電[1-3]的策略,但為了快速點燈以及維弧,在點燈的開始階段,逆變電路的工作模式與過渡和穩(wěn)定階段的工作模式都還存在著很大的不同。總結(jié)如下:①在啟動階段,選擇某一對角開關(guān)開通,以保證可靠啟動。②在預(yù)熱和維弧階段,通常只需一個周期,即可保證輝光向弧光的穩(wěn)定過渡。一個周期的長度與燈啟動時刻的狀態(tài),即冷燈啟動。還是熱燈啟動有關(guān),也與燈的老化程度有關(guān)。一般來說,冷燈啟動時,預(yù)熱的周期短,而燈熄滅后,短時等待再啟動情況下的周期長;老化嚴(yán)重的燈預(yù)熱周期長。為了避免電極的不對稱燒損。控制程序必須保證每個半波中的電流即時間積分相等。③在過渡期間和穩(wěn)態(tài)期間,逆變頻率約為400Hz,占空比為50%。
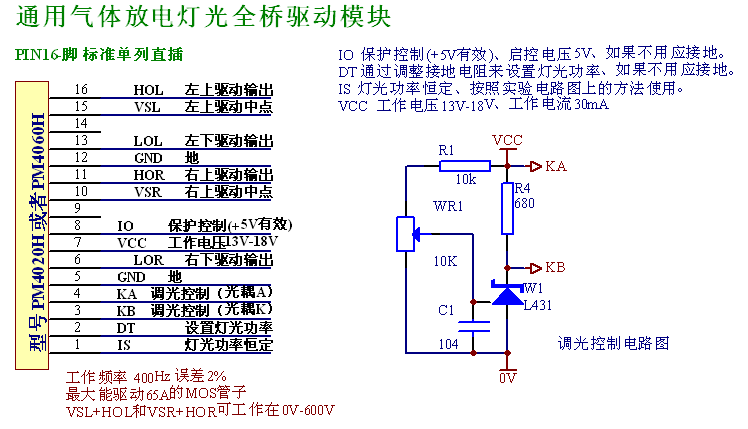
為產(chǎn)生較好的方波電流以及兼容預(yù)熱期間的長周期,通常采用的是全橋逆變電路拓?fù)洹T谌珮螂娐分校仨氉屑毧紤]兩個上部開關(guān)管的驅(qū)動方案。對此,①從成本和體積角度來考慮,如果采用3個獨立的電源來作控制電源方案。顯然不合理。②如果采用集成自舉芯片,如:IR2110或BA2030等,則因自舉電容需要預(yù)充電。其電容量不能太小,還需要兼顧多個頻率段的要求,會增加系統(tǒng)體積;此外,工作前,還要先為自舉電容充電,以滿足啟動時長期單臂工作的需要。而且電容量的大小要按最低的切換頻率設(shè)計[1,2],因而電容體積也不可能過小。③過低的頻率一般都不適合采用脈沖變壓器,因而可能會增加體積。
鑒于這些問題.這里采用分立元件構(gòu)建自舉驅(qū)動電路的方案,該方案雖會增加元件數(shù)量,但不會增加太多的電路面積,而且還可增加設(shè)計的自由度。采用提出的自舉驅(qū)動電路.其驅(qū)動靈活.非常適合低頻逆變器的應(yīng)用。
2 交流方波逆變電路分析
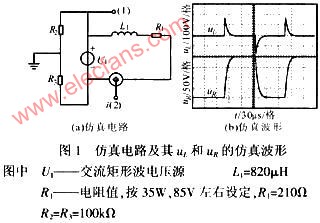
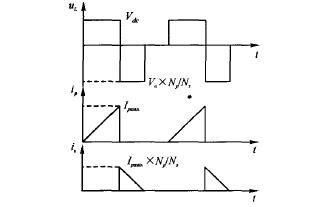
全橋逆變電路的負(fù)載由電感和電阻串聯(lián)而成。電感不僅是高壓發(fā)生器中高壓變壓器的次級.同時也是鎮(zhèn)流電感。逆變橋相當(dāng)于加在負(fù)載兩端的交流矩形波電壓us=±ubus。在任一時刻,交流矩形波電壓均滿足:

說明在t(0+)時刻,電流變化率,即由負(fù)變正的上升率最大,uL也最大,隨著負(fù)向電流的逐漸減小,電阻兩端的負(fù)電壓降絕對值逐漸降低,由式(8)可知,uL也逐漸減小,從而按式(6),電流的變化率降低,并且在uL=ubus電阻電壓降為零時刻時,iL上升為零,而后電流變?yōu)檎撕箅娮鑳啥说碾妷簎R反向變?yōu)檎妷海瑄L繼續(xù)降低,iL的上升率也繼續(xù)降低。直到uR=ubus時刻,uL=0,iL才不再變化,從而達到正向穩(wěn)態(tài),穩(wěn)態(tài)電流可表示為:
要保證得到方波電流和電壓.必須使過渡時間與穩(wěn)態(tài)時間相比可以忽略。對此應(yīng)綜合考慮下述兩個因素。①與燈的等效阻抗匹配的電感值不能過大.而燈的等效阻抗在過渡階段主要是增高變化的。在穩(wěn)態(tài)時等效阻抗最大,所以只要按照最小等效阻抗選取電感值,就能兼容過渡和穩(wěn)態(tài)兩種情況。②電感值的選擇應(yīng)考慮周期和頻率的選取。在燈的運行過程中,400Hz約是最高頻率,因此只要按照400Hz設(shè)計電感值,就能滿足整個運行過程。
圖1a示出仿真電路,為了更好地說明分析結(jié)果,電感值有意設(shè)定得比較大。圖1b示出電感端電壓uL和電阻端電壓uR的仿真波形。由圖1b可見,在過渡階段,iL的過渡過程與分析結(jié)果基本一致。若減小電感值,則可縮短過渡過程。實際采用的電感值約為690μH。
3 分立元件自舉逆變電路設(shè)計
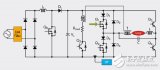
圖2示出采用分立電阻的自舉驅(qū)動逆變電路拓?fù)洹K煞至⒃M成,其特點是:①驅(qū)動電路的電源地與逆變?nèi)珮虻哪妇€電源正接在一起.使得控制電源懸浮在母線電源之上;②主晶體管VQ1工作在截止和放大狀態(tài),而非完全的開關(guān)狀態(tài)。在對橋臂開關(guān)施加開通信號期間,工作在恒流狀態(tài)下:施加關(guān)斷信號期間,工作在截止?fàn)顟B(tài)下。
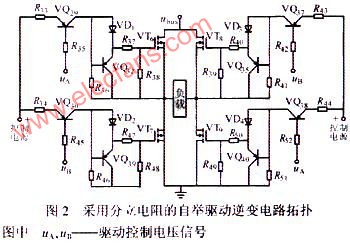
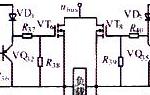
圖3示出無穩(wěn)壓管的自舉驅(qū)動電路。當(dāng)驅(qū)動控制信號為高電壓,即等于控制電源電壓UCC時,VQ1的基極電壓ubVQ1=13V,VQ1截止,R7中沒有電流流過.橋臂開關(guān)管VT1的柵源驅(qū)動電壓ugsVT1=0,VT1不導(dǎo)通。這時,無論VT1是上部開關(guān)管,還是下部開關(guān)管,VQ1的端電壓uebVQ1也都等于Ucc+Ubus。
當(dāng)驅(qū)動控制信號為低電壓.即等于控制電源地的電位時,VQ1的基極電壓由R1,R2,R3決定,即:
這一恒定電流IR1也要流經(jīng)R7,所以R7的端電壓即為ugsVT1。各電阻值的設(shè)定一定要使R7的端電壓和柵源極電壓滿足驅(qū)動的要求。這樣,R1的端電壓和電流都是恒定的。即:
另外需注意的是,橋臂上下兩個開關(guān)管的驅(qū)動電路中主晶體管的端電壓uebVQx的波形差別非常大.這是因為自舉驅(qū)動電路的控制電源與全橋母線電源是串聯(lián)的。對于上部開關(guān)管而言,當(dāng)產(chǎn)生開通驅(qū)動信號時,控制電源與橋臂中點之間的電壓為Ucc,此時主晶體管兩端的壓降可表示為:
這是一個較低的電壓。在VT1關(guān)斷期間,由于VT1的源極也即橋臂中點的電位等于全橋母線電源地.則此時VQ1兩端的電壓降為:
對于下部開關(guān)管而言,產(chǎn)生關(guān)斷驅(qū)動信號期間,端電壓也滿足式(13),但在產(chǎn)生開通驅(qū)動信號期間,由于下管的源極始終是母線電源地,所以此時VQ1的端電壓可表示為:
由此可見,相對于式(13)來說,式(14)和式(15)所代表的電壓均為較高電壓。由此可知,下管驅(qū)動電路中主晶體管的工作條件較為惡劣,所以必須限制流過的電流.并降低功耗,同時選擇額定功率較大的晶體管。
圖4示出根據(jù)圖3電路,采用Spice4軟件仿真得到的母線電壓為單相全波整流濾波電壓時上、下部驅(qū)動電路中主晶體管VQ1的端電壓uceVQ1和上、下部VT1的柵源極驅(qū)動電壓ugeVT1波形。可見,母線電壓波形主要降落在主晶體管上。在驅(qū)動波形上體現(xiàn)不出來。仿真結(jié)果與分析結(jié)果完全吻合。
綜上所述,該電路中的電阻值需仔細設(shè)計。設(shè)計原則是:①在開通驅(qū)動期間.流過柵源之間的電阻R1和主晶體管的電流要滿足電流與R1的乘積,并符合驅(qū)動要求,而且應(yīng)盡量小,以降低晶體管的功耗:②驅(qū)動電流要合適。
4 試驗驗證
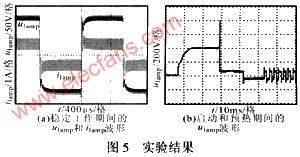
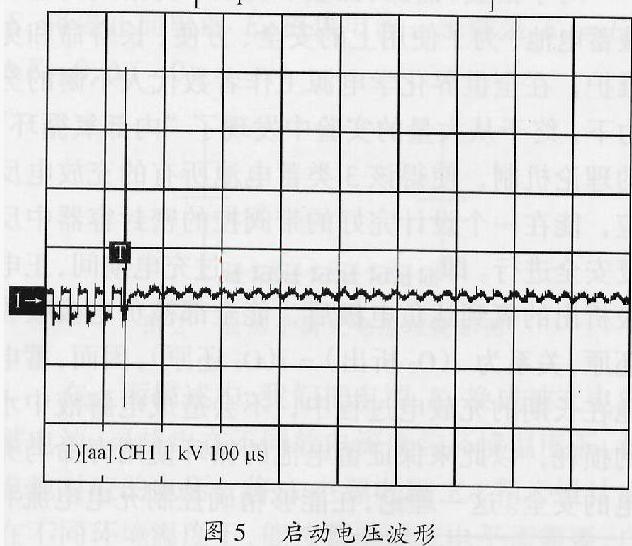
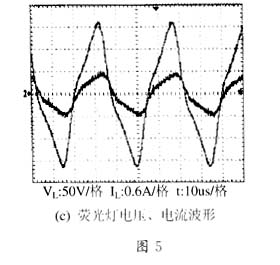
圖5a示出設(shè)計的電子鎮(zhèn)流器在穩(wěn)定工作期間,逆變電路的燈電壓ulamp和燈電流ilamp實測波形。由圖可見,設(shè)計的自舉驅(qū)動電路完全能滿足全橋驅(qū)動的需要。圖5b示出電子鎮(zhèn)流器在啟動和預(yù)熱期伺逆變電路的ulamp實測波形。由圖可見,自舉驅(qū)動電路不僅能滿足在啟動期間使某一對角主開關(guān)管始終導(dǎo)通.另一對角主開關(guān)管始終關(guān)斷的控制要求,而且在預(yù)熱維弧階段,還能滿足自適應(yīng)相對更加低頻的要求。
5 結(jié) 論
對HID前照燈電子鎮(zhèn)流器采用后級逆變電路的自舉驅(qū)動電路進行了定量分析:提出了電路設(shè)計和元器件選取原則;給出了仿真結(jié)果和實驗波形。實驗證明.所采用的自舉驅(qū)動電路能夠很好地完成電子鎮(zhèn)流器的工作要求。設(shè)計的逆變電路用自舉驅(qū)動電路可以滿足啟動階段頻率的靈活調(diào)節(jié)。










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論