 電子發(fā)燒友App
電子發(fā)燒友App


教學目標
掌握分析三相異步電動機的機械特性;
掌握三相異步電動機的各種起動方法;
掌握三相異步電動機的回饋、反接、能耗制動運行狀態(tài)。
3.1 Speed /Torque Curves
Vocabulary
1. power distribution
2. electromagnetical torque
3. breakdown torque=stalling torque
4. asymptotic
5. abscissae
6. skew
7. full-pitch coil
Example
A three-phase,230V,60Hz,12kW,4 pole wound induction motor has the following parameters expressed in Ω /phase.
R1=0.095 x1=0.68
x2=0.672 xm=18.7
Using MATLAB, plot the electromechanical torque Tmech as a function of rotor speed in r/min for rotor resistances of r2=0.1,0.2,0.5,1.0 and 1.5 Ω .
3.2 Starting of Induction Motors
Vocabulary
ball mill, crusher, compressor
terminal, a deep-bar cage
installation, maintenance
aperiodic component
resultant flux , stationary
inrush current , residual magnetisation
qualitative , inertia , parabola , kinetic
direct connection to the line
autotransformer
starting by star-delta switching
m.m.f = magnetomotive force 磁動勢
rotating field 旋轉磁場
ampere-turns 安匝
stator, rotor, primary (secondary) winding 定、轉子初(次)級繞組
slip 轉差,滑差
lamination 沖片,疊片;薄片
periphery 圓周
counterclockwise 反時針方向的
phase-sequence 相序
It is interesting to note that this expression could have been written down directly by applying the general theorem for maximum power transfer in such a series circuit; i.e. the load resistance must be equal to the impedance modulus of the remaining circuit components.
The starting torque can be increased up to the maximum figure merely by inserting an external resistance to bring r 2 up to (substitute s=1 in eqn. (2.7)), this value is much higher than the natural rotor resistance
In a number of industries motors must satisfy very strict speed characteristic requirements, both in respect to range and smoothness of control and also in respect to economical operation. From the point of view of speed-control characteristics, induction motors are inferior to d.c. motors, the shortcoming being the greater the wider the range of control.
1. State in which quadrants a machine operates
???a. As a brake
???b. As a motor
???c. As a generator
2. Under what circumstances is reduced voltage starting required ?
3. Name four types of circuit diagrams and describe the purpose of each.
o 轉子串電阻分級起動
作圖法計算起動電阻 :
先畫固有機械特性;
確定最大起動轉矩 T 1 及切換轉矩 T 2 ;
作第一級起動機械特性;
作第二級起動機械特性;
作第三級起動機械特性;
完成作圖。
解析法計算起動電阻
3.3 三相異步電動機的制動
能耗制動
基本原理

????制動停車過程中,系統(tǒng)原來貯存的動能消耗了,這部分能量主要被電動機轉換為電能消耗在轉子回路中,與他勵直流電動機的能耗制動過程相似。因此,上述過程亦稱之為能耗制動。
o 定子等效電流
????三相異步電動機能耗制動過程中電磁轉矩 T 的產生,是由于轉子與定子磁通勢之間有相對運動;相對運動速度的大小與方向不同,則轉矩 T 的大小與方向也隨之不同。
????分析能耗制動狀態(tài)下運行的三相異步電動機,可以用三相交流電流產生的旋轉磁通勢 等效替代直流磁通勢 ,在等效替代后,就可以使用電動運行狀態(tài)時的分析方法與所得結論。等效替代的條件是:
(1) 用 等效 ,需保持磁通勢幅值不變,
(2) 用 等效 ,需保持磁通勢與轉子之間相對轉述 ( 即轉差 ) 不變,為 0-n=-n 。
o 轉差率及等值電路

機械特性
特點:
v 異步電動機能耗制動的機械特性與定子接三相交流電源運行時的機械特性相似。
v 當直流勵磁一定,而轉子電阻增加時,產生最大制動轉矩時的轉速隨之增加,但是產生的最大轉矩值不變。
v 轉子電路電阻不變,而增大直流勵磁電流時,產生的最大制動轉矩增大,但產生最大轉矩時的轉速不變。
反接制動

倒拉反轉運行

????拖動位能性恒轉矩負載運行的三相繞線式異步電動機,若在轉子回路內串人一定值的電阻,電動機轉速可以降低。如果所串的電阻超過某一數值后,電動機還要反轉,運行于第Ⅳ象限,稱之為倒拉反轉運行狀態(tài)。
倒拉反轉運行時負載向電動機送入機械功率是靠負載儲存的位能的減小,是位能性負載倒過來拉著電動機反轉。
回饋制動運行
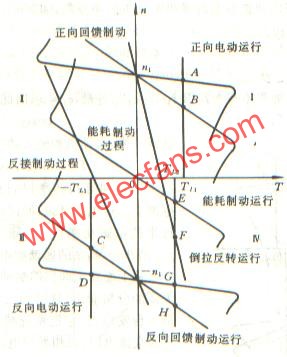
????電動機運行于第Ⅳ象限, T>0 , n<0 ,稱為反向回饋制動。起重機高速放下重物時,經常采用反向回饋制動運行方式。
????反向回饋制動運行時,電動機的功率關系與正向回饋制動過程是一樣的,電動機是一臺發(fā)電機,它把負載位能減少而輸入的機械功率變?yōu)殡姽β剩缓蠡厮徒o電網。從節(jié)能的觀點看問題,反向回饋制動下放重物比能耗制動下放重物要好。
??? 運行在正向電動狀態(tài)的三相異步電動機,當拖動的負載是位能恒轉矩負載時,如果進行反接制動停車,當轉速降到 n=0 時若不采取聽出措施,那么電動機將會反接起動,并最后運行于反向回饋制動狀態(tài)。









 工商網監(jiān)
工商網監(jiān)
評論