 電子發燒友App
電子發燒友App


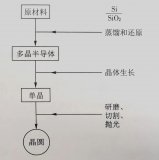
介紹晶體生長控溫系統的組成,微弱溫差信號的接 口調理方法及智能控制器的分級控制方式。系統控溫范圍(25~75)℃,控溫精度達0. 01℃,分辨率0.001℃,投入使用多年來,工作穩定可靠。
關鍵詞:晶體生長;控溫;信號調理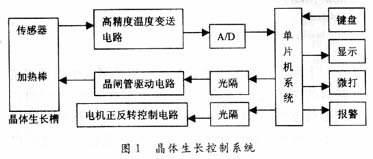

關鍵詞:晶體生長;控溫;信號調理
High Precision Temperature Control System in the Crystal Growth Control
YANG Qi, YANG Xiaoling
(Physics and Information Engineering College, Fuzhou University,
Fuzh ou 350002, China)
Fuzh ou 350002, China)
Keywords: crystal growth; thermo?control; signal processing
1系統硬件組成
晶體生長控溫系統如圖1所示,高精度溫度?變送器把檢測到的微弱溫差信號放大后經A/D轉 換 ,由單片機系統進行數據采集和分析處理,一方面由LED顯示現場采集溫度值,另一方面把 該采集信號與鍵盤設置的溫度值進行比較,提取溫差量及溫差變化量,作為智能控制的輸入 參數。輸出量控制晶閘管驅動電路,進一步控制加熱棒的功率,達到控溫目的。由于晶體生 長是在旋轉運動下進行的,因此,整個載晶裝置由一可逆電機控制其旋轉過程。此外系統還 設計了微打接口及溫度越限聲光報警電路。
1.1高精度溫度變送器
系統選用Pt100作為溫度傳感器。它的溫度系數α=0.00385/℃,對于0.001℃ 的微小溫差變化,Pt100的電阻值變化約為0.385mΩ,如此小的電阻變化量經電橋轉 換后,電信號最大也只能達到0.5~1μV,因此處理微伏級弱信號的接口調理方法, 包括高精度不平衡直流電橋,低截頻模擬濾波器,低噪聲、低漂移、高靈敏度直流放大器及 接地體等環節的設計。
晶體生長控溫系統如圖1所示,高精度溫度?變送器把檢測到的微弱溫差信號放大后經A/D轉 換 ,由單片機系統進行數據采集和分析處理,一方面由LED顯示現場采集溫度值,另一方面把 該采集信號與鍵盤設置的溫度值進行比較,提取溫差量及溫差變化量,作為智能控制的輸入 參數。輸出量控制晶閘管驅動電路,進一步控制加熱棒的功率,達到控溫目的。由于晶體生 長是在旋轉運動下進行的,因此,整個載晶裝置由一可逆電機控制其旋轉過程。此外系統還 設計了微打接口及溫度越限聲光報警電路。
1.1高精度溫度變送器
系統選用Pt100作為溫度傳感器。它的溫度系數α=0.00385/℃,對于0.001℃ 的微小溫差變化,Pt100的電阻值變化約為0.385mΩ,如此小的電阻變化量經電橋轉 換后,電信號最大也只能達到0.5~1μV,因此處理微伏級弱信號的接口調理方法, 包括高精度不平衡直流電橋,低截頻模擬濾波器,低噪聲、低漂移、高靈敏度直流放大器及 接地體等環節的設計。
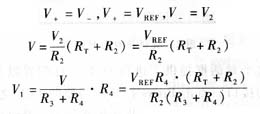
由圖2電路可知:
 ?
?
當電橋平衡時有:R1R4=R2R3,RT=R1+ΔR 。代入上式并整理得:
 ?
?
對于具體溫度測控系統,R2、R3、R4均為已知,VREF 為TL431的內部基準電壓,是一恒值,因此電橋的輸出電壓ΔV與ΔR成線性關系,即電橋輸出實現線性化。電阻R2、R3、R4均選溫度系數小且同方向變化的線繞精密電阻,這樣電橋輸出信號達到高穩定度目的。
選擇AD524作為溫度變送器的放大電路,其增益可由外接電阻RG調整,RG的溫度效應將 引起AD524放大倍數漂移或精密度等級下降,在高精度控溫系統中,必須對增益電阻的溫度 效應進行補償,具體設計方法見文獻[2]。
AD524放大的輸出信號經其后接的二階低通濾波器濾除電源干擾,RC濾波器的通帶寬度設計 為1.4Hz,它適用于緩慢變化溫度信號的帶通要求,而對于高頻干擾信號,低通 濾波 器具有良好的抗干擾能力。此外,輸入信號采用雙絞屏蔽線連接,以降低外界電磁干擾,放 大器的輸入端采用緊密的對稱布局,降低接點熱偶效應的影響,提高系統的穩定性。
1.2單片機系統及其接口
溫度變送電路的輸出信號,經16位A/D轉換器AD976轉換和8031構成的智能控制系統分析處理 后,由LED顯示現場溫度值,同時輸出信號控制晶閘管電路工作情況,從而控制槽中加熱棒 的工作,達到控溫的目的。晶閘管采用過零觸發方式,輸出功率采用PWM脈寬調節,避免負 載電流產生瞬態浪涌過程,減少射頻干擾及延長晶閘管的使用壽命。
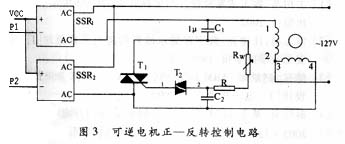
為使晶體生長均勻,要求載晶裝置處于旋轉運動中,即要求其按正轉—停—反轉—停—正轉 規律不斷運行,這一過程由圖3的可逆小電機及其控制電路實現,系統要求電機轉速較慢, 扭矩有較大的動力,因此選用10瓦ND-30型可逆電機,其中C1為電機起動電容,T1、T 2、R、C2、RW組成雙向晶閘管電機調速電路,當8031使P1端輸出低電平、P2端輸出高 電平時,固態繼電器SSR1閉合,電機正轉;當P1端輸出高電平、P2端輸出低電平時,SSR2閉 合,電機反轉,其轉速通過調節R?W控制雙向晶閘管T?1的導通角來實現;當P1端及P2端均 輸出高電平時,可逆電機停止轉動。?
? 當電橋平衡時有:R1R4=R2R3,RT=R1+ΔR 。代入上式并整理得:
? 對于具體溫度測控系統,R2、R3、R4均為已知,VREF 為TL431的內部基準電壓,是一恒值,因此電橋的輸出電壓ΔV與ΔR成線性關系,即電橋輸出實現線性化。電阻R2、R3、R4均選溫度系數小且同方向變化的線繞精密電阻,這樣電橋輸出信號達到高穩定度目的。
選擇AD524作為溫度變送器的放大電路,其增益可由外接電阻RG調整,RG的溫度效應將 引起AD524放大倍數漂移或精密度等級下降,在高精度控溫系統中,必須對增益電阻的溫度 效應進行補償,具體設計方法見文獻[2]。
AD524放大的輸出信號經其后接的二階低通濾波器濾除電源干擾,RC濾波器的通帶寬度設計 為1.4Hz,它適用于緩慢變化溫度信號的帶通要求,而對于高頻干擾信號,低通 濾波 器具有良好的抗干擾能力。此外,輸入信號采用雙絞屏蔽線連接,以降低外界電磁干擾,放 大器的輸入端采用緊密的對稱布局,降低接點熱偶效應的影響,提高系統的穩定性。
1.2單片機系統及其接口
溫度變送電路的輸出信號,經16位A/D轉換器AD976轉換和8031構成的智能控制系統分析處理 后,由LED顯示現場溫度值,同時輸出信號控制晶閘管電路工作情況,從而控制槽中加熱棒 的工作,達到控溫的目的。晶閘管采用過零觸發方式,輸出功率采用PWM脈寬調節,避免負 載電流產生瞬態浪涌過程,減少射頻干擾及延長晶閘管的使用壽命。
為使晶體生長均勻,要求載晶裝置處于旋轉運動中,即要求其按正轉—停—反轉—停—正轉 規律不斷運行,這一過程由圖3的可逆小電機及其控制電路實現,系統要求電機轉速較慢, 扭矩有較大的動力,因此選用10瓦ND-30型可逆電機,其中C1為電機起動電容,T1、T 2、R、C2、RW組成雙向晶閘管電機調速電路,當8031使P1端輸出低電平、P2端輸出高 電平時,固態繼電器SSR1閉合,電機正轉;當P1端輸出高電平、P2端輸出低電平時,SSR2閉 合,電機反轉,其轉速通過調節R?W控制雙向晶閘管T?1的導通角來實現;當P1端及P2端均 輸出高電平時,可逆電機停止轉動。?
系統的軟件包括兩大部分:鍵盤管理系統和智能控制器。鍵盤管理系統提供的功能包括數據 設定、現場溫度顯示、時間顯示、重新啟動、停止控制、數據打印等,提供一個人機交互的 簡單界面。
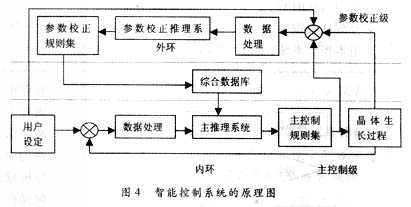
智能控制系統實現現場數據采集,智能控制算法以及受控過程的輸出控制等,其原理框圖如 圖4所示。人工晶體生長環境存在受控環境變化大,工藝曲線不確實,真實信號難采集等特 點,因此采用二級智能控制策略:一級為主控制級,也稱內環控制,一級為參數校正控制級 ,也稱外環控制。綜合數據庫為內環和外環所共享,存貯了受控對象的先驗知識、所要求的 品質指標、控制參數的先驗值及系統運行過程的有關動態值等,它為內環和外環提供有效的 控制數據。?
智能控制系統實現現場數據采集,智能控制算法以及受控過程的輸出控制等,其原理框圖如 圖4所示。人工晶體生長環境存在受控環境變化大,工藝曲線不確實,真實信號難采集等特 點,因此采用二級智能控制策略:一級為主控制級,也稱內環控制,一級為參數校正控制級 ,也稱外環控制。綜合數據庫為內環和外環所共享,存貯了受控對象的先驗知識、所要求的 品質指標、控制參數的先驗值及系統運行過程的有關動態值等,它為內環和外環提供有效的 控制數據。?
內環控制過程同時受到外環監測,當環境相對穩定,主控制級控制效果較好時,參數校正級 就無需調整主控制級的控制參數,一旦受控過程或用戶設定參數變化較大時,主控制級的控 制指標達不到用戶要求時,參數校正級就要投入調整過程,通過調整主控制級的控制參數來 改善主控制級的性能。
參數校正級的核心也是一個智能控制器,其輸入參數是受控現場數據、用戶設定、內環控制 情況等,受控對象是主控制級的控制參數,其變化范圍較小。輸入參數經數據規范化處理后 ,作為參數校正推理系統的推理條件,根據參數校正的相應規則,對綜合數據庫中主控制級 的控制參數進行調整,這個參數調整過程也可多次進行,直到主控制級的控制效果得到改善 ,參數校正才停止對主控制級控制參數的調整。參數校正控制采用的規則是IFTHEN 的形式,規則集也是按照“分類分層”的原理進行構造,其推理系統核心也 是啟發式子樹分離算法。推理系統的輸出決定內環控制參數的調整情況,從而提高主控制級 的控制質量。系統設計主控制級的控制參數可動態調整(由參數校正級來完成),而 參數校正 級的控制參數不能動態調整。?
參數校正級的核心也是一個智能控制器,其輸入參數是受控現場數據、用戶設定、內環控制 情況等,受控對象是主控制級的控制參數,其變化范圍較小。輸入參數經數據規范化處理后 ,作為參數校正推理系統的推理條件,根據參數校正的相應規則,對綜合數據庫中主控制級 的控制參數進行調整,這個參數調整過程也可多次進行,直到主控制級的控制效果得到改善 ,參數校正才停止對主控制級控制參數的調整。參數校正控制采用的規則是IFTHEN 的形式,規則集也是按照“分類分層”的原理進行構造,其推理系統核心也 是啟發式子樹分離算法。推理系統的輸出決定內環控制參數的調整情況,從而提高主控制級 的控制質量。系統設計主控制級的控制參數可動態調整(由參數校正級來完成),而 參數校正 級的控制參數不能動態調整。?
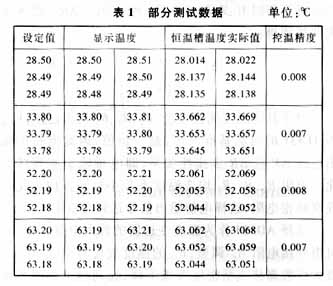
本控溫系統經多家單位投入使用,多年運行表明控溫精度均達0.01℃,工作穩定可靠 。表1是控溫過程的部分測試數據。
采用本控溫系統,不僅可提高控溫質量,而且可以 實現溫度自動報警,參數制表,數據打印 ,資料存檔等功能,有效地提高了晶體生產的技術及管理水平。?
采用本控溫系統,不僅可提高控溫質量,而且可以 實現溫度自動報警,參數制表,數據打印 ,資料存檔等功能,有效地提高了晶體生產的技術及管理水平。?


















 工商網監
工商網監
評論