 電子發(fā)燒友App
電子發(fā)燒友App


探測物體的一種穩(wěn)妥的方法就是和物體進行物理的接觸。接觸可能是物體探測的最常見的形式,而且通常只用簡單的開關(guān)就可以實現(xiàn)。在這里,我們將介紹一些接觸方式,其中包括“軟接觸”技術(shù),使用這項技術(shù)的機器人能通過細微的接觸來進行探測。
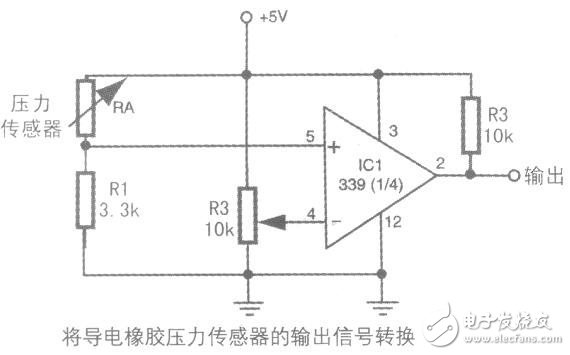
下圖中給出使用導電橡膠片的比較合理的接口電路。導電橡膠片和一個3.3k電阻串聯(lián)在地與電源正電壓之間形成了分壓器。當導電橡膠片受壓時,傳感器的輸出端的電壓就會變化。傳感器的輸出端就是壓電片和電阻之間的一點,此信號連接到比較器339的反向輸入端引腳上。當壓電片的電壓超過了比較器的參考電壓時,比較器輸出狀態(tài)改變,就表示碰撞發(fā)生了。這個比較器的輸出可以用來驅(qū)動一個控制馬達方向的繼電器上或者直接連接到一個微處理器或計算機端口上。
多路碰撞開關(guān)
當有許多開關(guān)或者近距離探測設(shè)備布置在機器人的周圍時會怎樣呢?不得不把每個開關(guān)的輸出連接到電腦里,但是那樣做浪費了很多外設(shè)端口。一個比較好的解決辦法是利用一個優(yōu)先編碼器或者多路轉(zhuǎn)換器。這兩個方案允許在一條公共控制線路上連接多個開關(guān)。機器人的微處理器或計算機將查詢這條控制線,而不是每個開關(guān)或近距離探測設(shè)備。
使用優(yōu)先編碼器電路設(shè)計
下圖中的電路使用了一塊74148優(yōu)先編碼器集成塊。
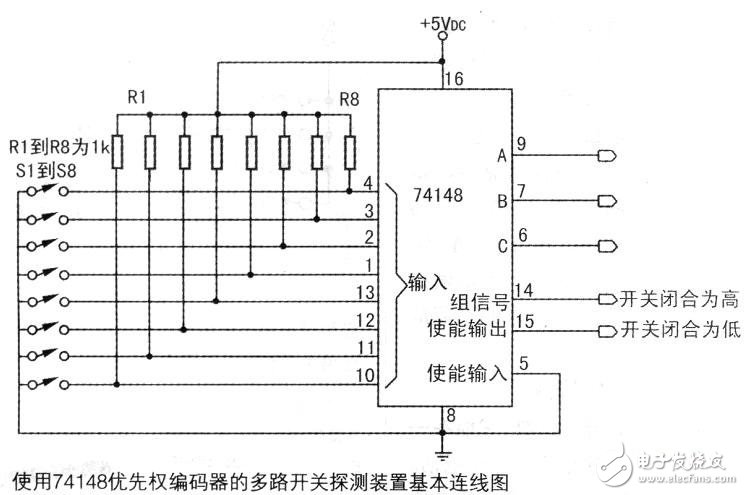
集成塊的輸入端就是那些開關(guān)的輸出。 當一個開關(guān)閉合,相應的二進制編碼就會出現(xiàn)在A-B-C輸出引腳處。對于優(yōu)先編碼器,只有開關(guān)中最高的值才能在輸出端顯示出來。換句話說,如果開關(guān)4和7都閉合了,那么輸出端只能反應引腳4閉合。
使用電阻分壓排
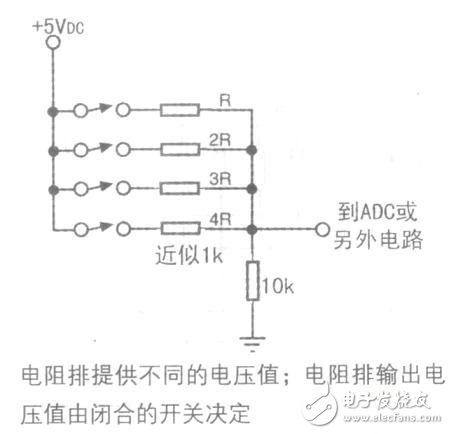
如果機器人的計算機或者微控制器中有模一數(shù)轉(zhuǎn)換器(ADC)或者可以添加一個,就能以另一種技術(shù)實現(xiàn)多路開關(guān)接口:電阻分壓排。概念十分簡單,像圖18 所示。每個開關(guān)通過一個電阻的一端接地,而+V電壓串接另一電阻到各開關(guān)上。多個開關(guān)則并行接入ADC的輸入端,如圖所示。這些電阻形成了一個分壓器。由于每個電阻值都不同,所以當某一開關(guān)閉合時,對應的電壓值都是獨一無二的。注意,由于電阻是并聯(lián)的,所以一次可能有多個開關(guān)閉合。從而得到一個中間值。要對連接每個開關(guān)的電阻值進行摸索實驗以獲得最大的靈活性。








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論