 電子發(fā)燒友App
電子發(fā)燒友App


PWM簡介
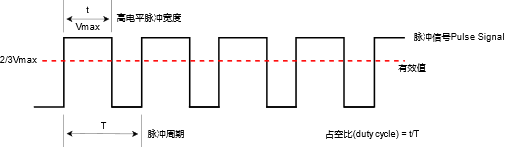
脈沖寬度調(diào)制是利用微處理器的數(shù)字輸出來對模擬電路進行控制的一種非常有效的技術(shù),廣泛應(yīng)用在從測量、通信到功率控制與變換的許多領(lǐng)域中。
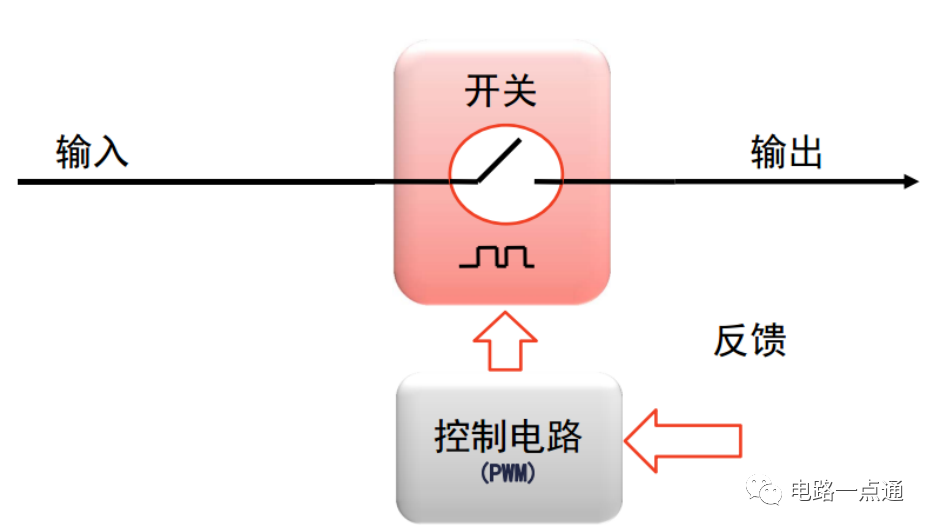
脈沖寬度調(diào)制是一種模擬控制方式,其根據(jù)相應(yīng)載荷的變化來調(diào)制晶體管基極或MOS管柵極的偏置,來實現(xiàn)晶體管或MOS管導(dǎo)通時間的改變,從而實現(xiàn)開關(guān)穩(wěn)壓電源輸出的改變。這種方式能使電源的輸出電壓在工作條件變化時保持恒定,是利用微處理器的數(shù)字信號對模擬電路進行控制的一種非常有效的技術(shù)。
PWM控制技術(shù)以其控制簡單,靈活和動態(tài)響應(yīng)好的優(yōu)點而成為電力電子技術(shù)最廣泛應(yīng)用的控制方式,也是人們研究的熱點。由于當(dāng)今科學(xué)技術(shù)的發(fā)展已經(jīng)沒有了學(xué)科之間的界限,結(jié)合現(xiàn)代控制理論思想或?qū)崿F(xiàn)無諧振波開關(guān)技術(shù)將會成為PWM控制技術(shù)發(fā)展的主要方向之一。其根據(jù)相應(yīng)載荷的變化來調(diào)制晶體管基極或MOS管柵極的偏置,來實現(xiàn)晶體管或MOS管導(dǎo)通時間的改變,從而實現(xiàn)開關(guān)穩(wěn)壓電源輸出的改變。這種方式能使電源的輸出電壓在工作條件變化時保持恒定,是利用微處理器的數(shù)字信號對模擬電路進行控制的一種非常有效的技術(shù)。
脈寬調(diào)制分類
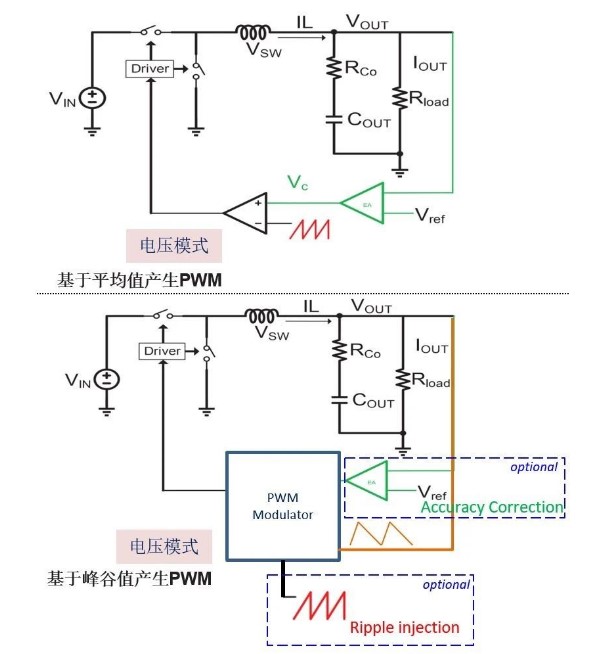
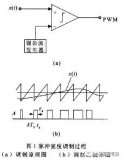
從調(diào)制脈沖的極性看,PWM又可分為單極性與雙極性控制模式兩種。
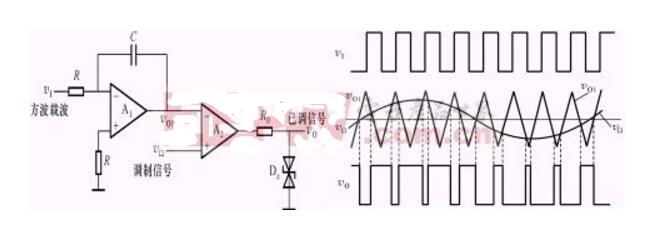
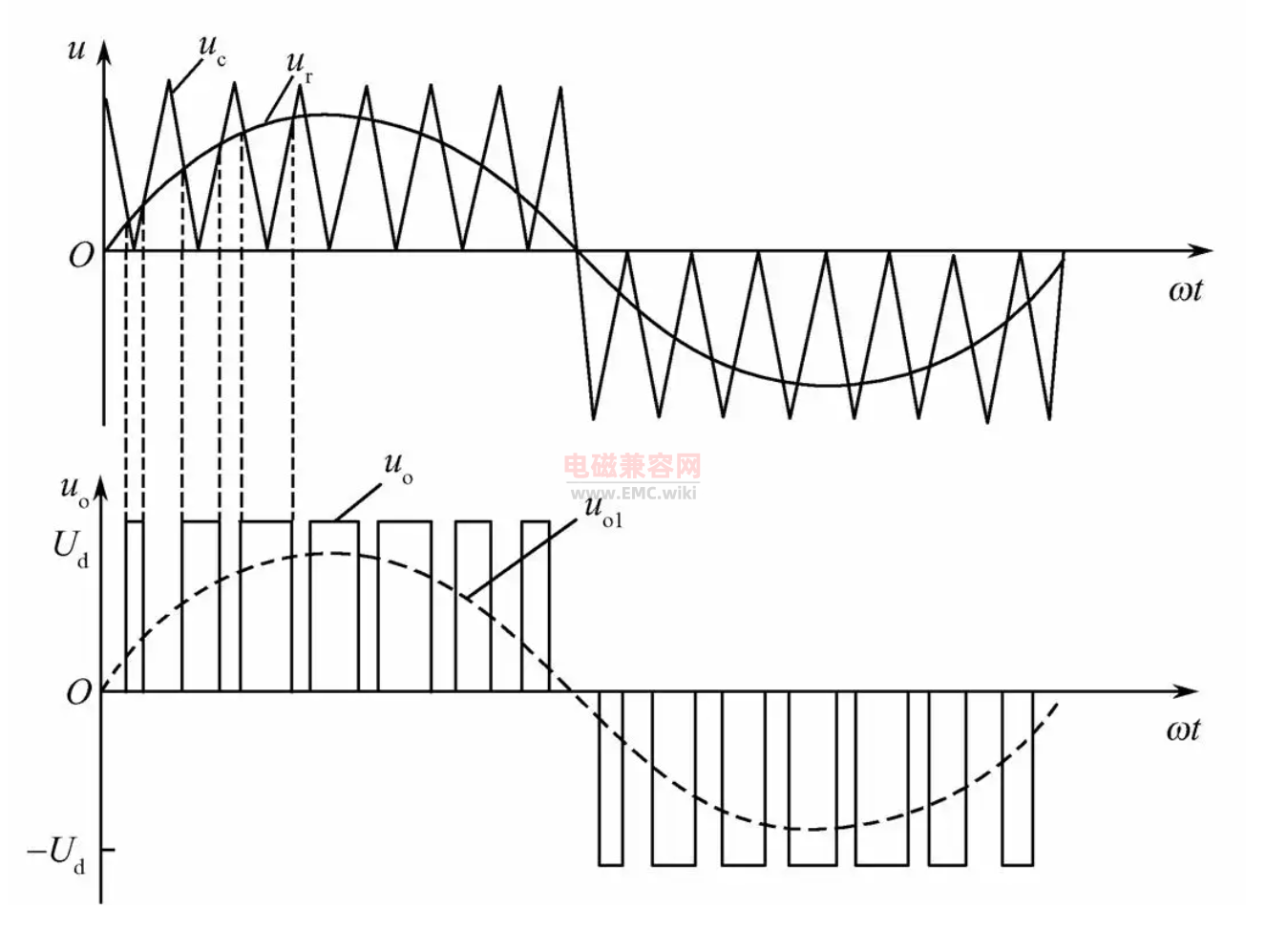
產(chǎn)生單極性PWM模式的基本原理如圖6.2所示。首先由同極性的三角波載波信號ut。與調(diào)制信號ur,比較(圖6.2(a)),產(chǎn)生單極性的PWM脈沖(圖6.2(b));然后將單極性的PWM脈沖信號與圖6.2(c)所示的倒相信號UI相乘,從而得到正負半波對稱的PWM脈沖信號Ud,如圖6.2(d)所示。
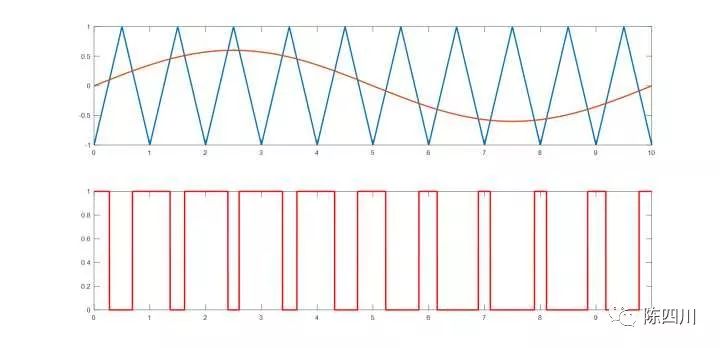
雙極性PWM控制模式采用的是正負交變的雙極性三角載波ut與調(diào)制波ur,如圖6.3所示,可通過ut與ur,的比較直接得到雙極性的PWM脈沖,而不需要倒相電路。
PWM優(yōu)點
PWM的一個優(yōu)點是從處理器到被控系統(tǒng)信號都是數(shù)字形式的,無需進行數(shù)模轉(zhuǎn)換。讓信號保持為數(shù)字形式可將噪聲影響降到最小。噪聲只有在強到足以將邏輯1改變?yōu)檫壿?或?qū)⑦壿?改變?yōu)檫壿?時,也才能對數(shù)字信號產(chǎn)生影響。
對噪聲抵抗能力的增強是PWM相對于模擬控制的另外一個優(yōu)點,而且這也是在某些時候?qū)WM用于通信的主要原因。從模擬信號轉(zhuǎn)向PWM可以極大地延長通信距離。在接收端,通過適當(dāng)?shù)腞C或LC網(wǎng)絡(luò)可以濾除調(diào)制高頻方波并將信號還原為模擬形式。
總之,PWM既經(jīng)濟、節(jié)約空間、抗噪性能強,是一種值得廣大工程師在許多設(shè)計應(yīng)用中使用的有效技術(shù)。
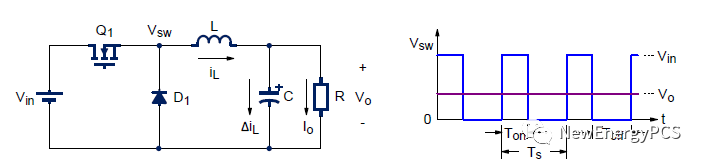
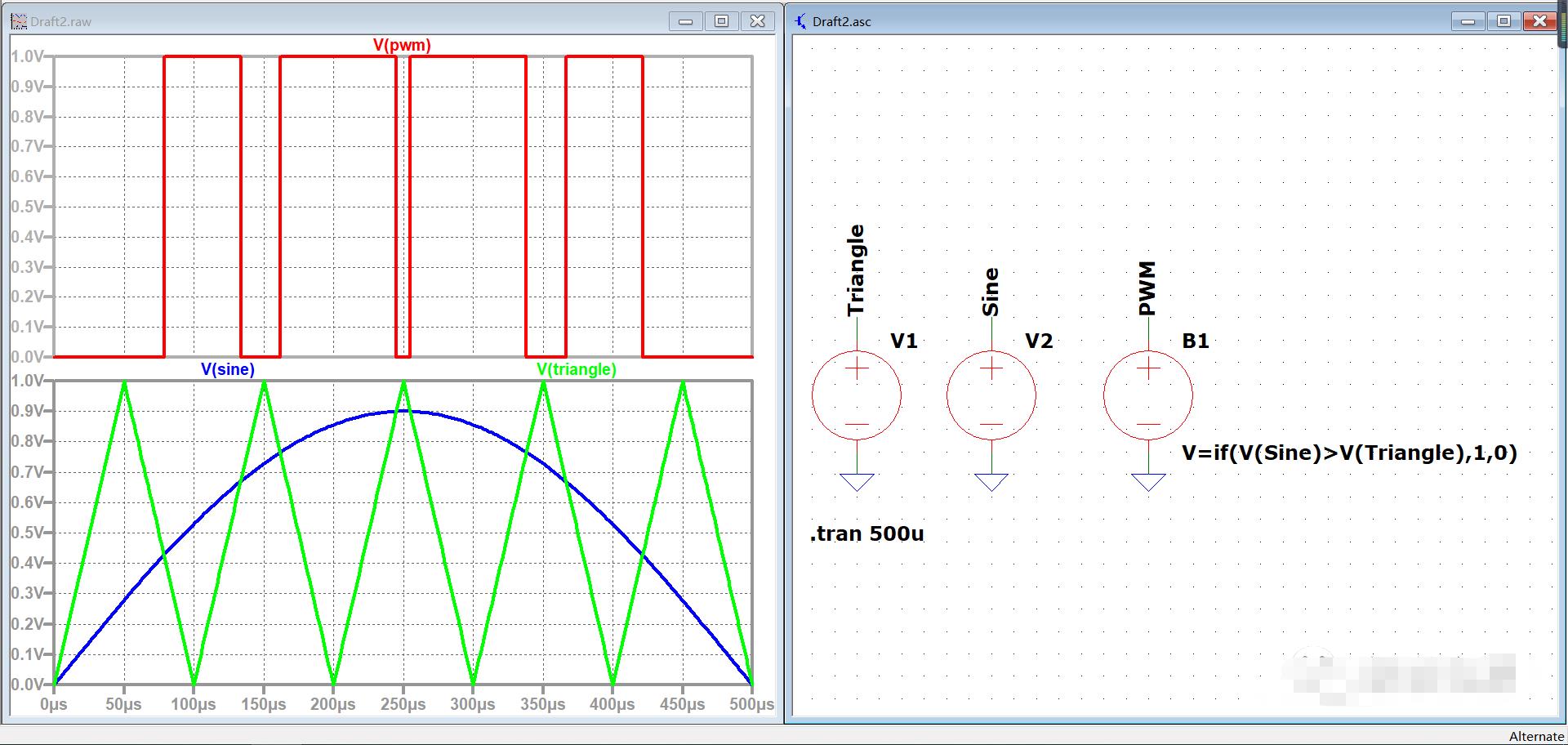
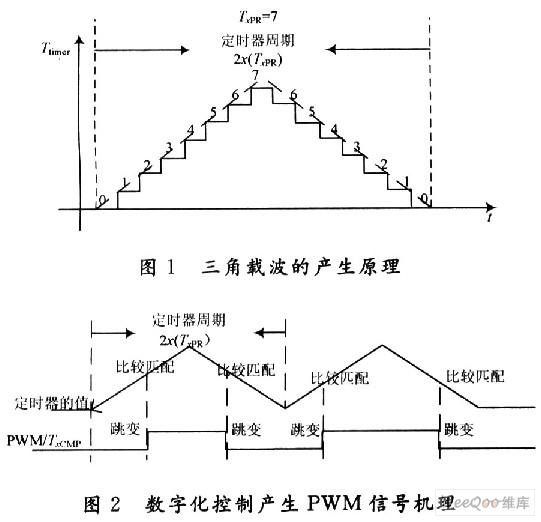
PWM脈寬調(diào)制原理
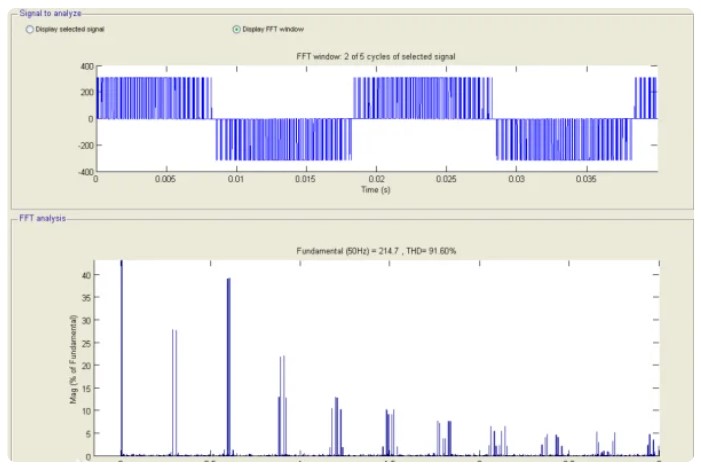
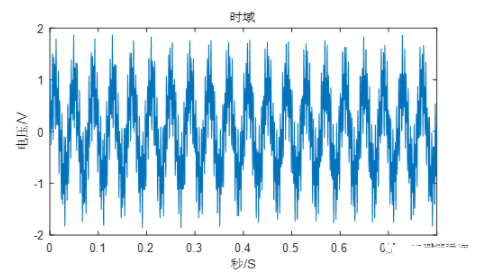
脈寬調(diào)制技術(shù)是通過對逆變電路開關(guān)的通斷控制來實現(xiàn)對模擬電路的控制的。脈寬調(diào)制技術(shù)的輸出波形是一系列大小相等的脈沖,用于替代所需要的波形,以正弦波為例,也就是使這一系列脈沖的等值電壓為正弦波,并且輸出脈沖盡量平滑且具有較少的低次諧波。根據(jù)不同的需求,可以對各脈沖的寬度進行相應(yīng)的調(diào)整,以改變輸出電壓或輸出頻率等值,進而達到對模擬電路的控制。
PWM同步調(diào)制簡介
同步調(diào)制一N等于常數(shù),并在變頻時使載波和信號波保持同步
1.基本同步調(diào)制方式,fr變化時N不變,信號波一周期內(nèi)輸出脈沖數(shù)固定
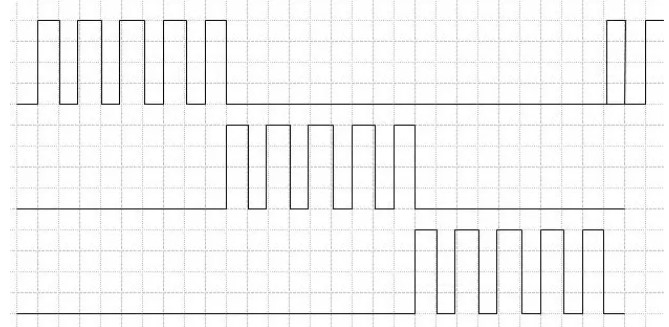
2.三相電路中公用一個三角波載波,且取N為3的整數(shù)倍,使三相輸出對稱
3.為使一相的PWM波正負半周鏡對稱,N應(yīng)取奇數(shù)
4.fr很低時,fc也很低,由調(diào)制帶來的諧波不易濾除
5.fr,很高時,fc會過高,使開關(guān)器件難以承受

PWM同步調(diào)制優(yōu)缺點
在改變f的同時成正比地改變fc,使K保持不變,則稱為同步調(diào)制。
PWM采用同步調(diào)制的優(yōu)點是:可以保證輸出波 形的對稱性。對于三相系統(tǒng),為保持三相之間對稱、互差120゜相位角,K應(yīng)取3的整數(shù)倍;為保證雙極性調(diào)制時每相波形的正、負半波對稱,則該倍數(shù)應(yīng)取奇數(shù)。由于波形的對稱性,不會出現(xiàn)偶次諧波問題。但是,受開關(guān)器件允許的開關(guān)頻率的限制,保持K值不變,在逆變器低頻運行時,K值會過小,導(dǎo)致諧波含量變大。 使電動機的諧波損耗增加,轉(zhuǎn)矩脈動相對加劇
PWM具體應(yīng)用
PWM軟件法控制充電電流
該方法的基本思想就是利用單片機具有的PWM端口,在不改變PWM方波周期的前提下,通過軟件的方法調(diào)整單片機的PWM控制寄存器來調(diào)整PWM的占空比,從而控制充電電流。該方法所要求的單片機必須具有ADC端口和PWM端口這兩個必須條件,另外ADC的位數(shù)盡量高,單片機的工作速度盡量快。在調(diào)整充電電流前,單片機先快速讀取充電電流的大小,然后把設(shè)定的充電電流與實際讀取到的充電電流進行比較,若實際電流偏小則向增加充電電流的方向調(diào)整PWM的占空比;若實際電流偏大則向減小充電電流的方向調(diào)整PWM的占空比。在軟件PWM的調(diào)整過程中要注意ADC的讀數(shù)偏差和電源工作電壓等引入的紋波干擾,合理采用算術(shù)平均法等數(shù)字濾波技術(shù)。
PWM在推力調(diào)制中的應(yīng)用
1962年,Nicklas等提出了脈沖調(diào)制理論,指出利用噴氣脈沖對航天器控制是簡單有效的控制方案,同時能使時間或能量達到最優(yōu)控制。
脈寬調(diào)制發(fā)動機控制方式是在每一個脈動周期內(nèi),通過改變閥門在開或關(guān)位置上停留的時間來改變流經(jīng)閥門的氣體流量,從而改變總的推力效果,對于質(zhì)量流率不變的系統(tǒng),可以通過脈寬調(diào)制技術(shù)來獲得變推力的效果。
脈寬調(diào)制通常有兩種方法[15]:第一種為整體脈寬調(diào)制,對控制對象進行控制器設(shè)計,并根據(jù)控制要求的作用力大小,對整個系統(tǒng)模型進行動態(tài)的數(shù)學(xué)解算變換,得出固定力輸出應(yīng)該持續(xù)作用的時間和開始作用時間;第二種為脈寬調(diào)制器,不考慮控制對象模型,而是根據(jù)輸入進行“動態(tài)衰減”性的累加,然后經(jīng)過某種算法變換后,決定輸出所持續(xù)的時間。這種方式非常簡單,也能達到輸出作用近似相同。
脈寬調(diào)制控制技術(shù)結(jié)構(gòu)簡單、易于實現(xiàn)、技術(shù)比較成熟,俄羅斯已經(jīng)將其成功地應(yīng)用于遠程火箭的角度穩(wěn)定系統(tǒng)控制中。但是當(dāng)調(diào)制量為零時,正反向的控制作用相互抵消,控制效率明顯比變流率系統(tǒng)低。而且系統(tǒng)響應(yīng)有一定的滯后,其開關(guān)的頻率必須遠大于KKV本身的固有頻率,否則不但起不到調(diào)制效果,甚至?xí)l(fā)生災(zāi)難性后果。
在LED中的應(yīng)用
在LED控制中PWM作用于電源部分,脈寬調(diào)制的脈沖頻率通常大于100Hz,人眼就不會感到閃爍。












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論