 電子發(fā)燒友App
電子發(fā)燒友App


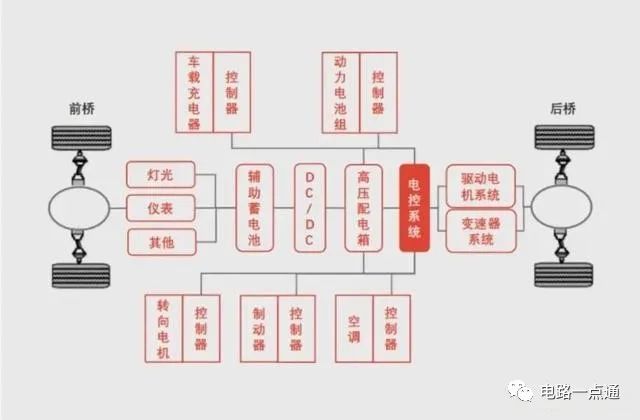
智能車又稱為無人駕駛汽車,屬于輪式移動機器人的一種,是一個集環(huán)境感知、路徑規(guī)劃、自動駕駛等多功能于一體的綜合系統(tǒng)。智能汽車技術將許多領域聯(lián)系在一起,如計算機科學、人工智能、圖像處理、模式識別和控制理論等。智能汽車與一般所說的自動駕駛有所不同,它更多指的是利用GPS 和智能公路技術實現(xiàn)的汽車自動駕駛。這種汽車不需要人去駕駛,因為它裝有相當于人的“眼睛”、“大腦”和“腳”的電視攝像機、電子計算機和自動操縱系統(tǒng)之類的裝置,這些置都裝有非常復雜的電腦程序,所以這種汽車能和人一樣會“思考”、“判斷”、“行走”,可以自動啟動、加速、剎車,可以自動繞過地面障礙物在復雜多變的情況下,能隨機應變,自動選擇最佳方案,指揮汽車正常、順利地行駛。
電路系統(tǒng)是智能汽車硬件系統(tǒng)的核心,對于本硬件電路系統(tǒng)而言,穩(wěn)定性是需要優(yōu)先保證的性能指標,畢竟跑完全程才是取得成績的前提。在此基礎上,還應當綜合考慮智能汽車的動力性、重心及電路板的緊湊性等其他指標。
電機驅動模塊
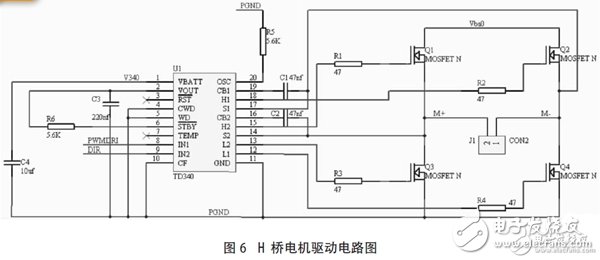
電機驅動模塊為智能汽車的行駛提供動力,它的性能直接影響到后輪電機的控制性能,包括加速、減速與制動等性能。本文采用MOSFET 驅動芯片加全橋驅動方案,只需合理的選擇MOSFET驅動芯片和功率MOSFET 以保證性能即可。電路圖如圖6 所示。
舵機驅動模塊
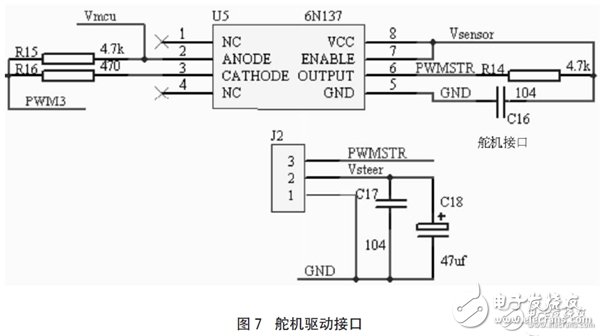
舵機負責智能汽車的轉向,舵機模塊能否穩(wěn)定工作直接影響到智能汽車在賽道上高速行駛時的穩(wěn)定性以及轉向時的靈敏度和精確度。舵機工作原理為:舵盤角位由單片機發(fā)出的PWM 控制信號的脈寬決定,舵機內(nèi)部電路通過反饋控制調節(jié)舵盤角位。由于自身即為角度閉環(huán)控制,而且性能較好,故系統(tǒng)中就不必考慮外加舵機閉環(huán)。舵機驅動模塊電路如圖7 所示。舵機驅動模塊同樣屬于功率部分,用6N137光耦進行信號隔離。
智能車輛是一個涉及多領域的復雜的綜合系統(tǒng),要達到實用的目的,還要進一步深入下研究去,還有許多工作要做。在硬件上還需要解決因攝像頭自身精度的差異或其因外部因素丟失數(shù)據(jù)導致影響智能車正常運行的問題,增強抗干擾能力;在軟件上,還需要進一步優(yōu)化算法,控制系統(tǒng)是智能汽車的核心內(nèi)容,針對智能汽車的功能需求,對智能汽車控制系統(tǒng)關鍵模塊進行了研究,設計的各模塊被應用于“飛思卡爾”智能汽車中,文中各圖對智能汽車的研究具有啟發(fā)作用。
汽車收音機應用環(huán)境的特殊性對電路性能具有更高的要求,而射頻電路的設計是實現(xiàn)高性能的關鍵。本文介紹了TDA7513的射頻電路設計方法,根據(jù)實際設計經(jīng)驗提出了提高射頻電路EMC特性和噪聲特性的設計方法和措施,并指出了射頻電路性能測試的注意要點。射頻電路是收音機電路設計的重點和難點,如果射頻電路設計不好,收音機的噪限靈敏度和信噪比以及其它技術指標都會大大下降,甚至只能手動收到很少的幾個廣播電臺,自動搜索電臺功能失效。從收音機天線端的廣播信號場強來看,信號的動態(tài)范圍非常大,尤其是汽車收音機所處的環(huán)境變化快而大。
收音機射頻電路通常很難集成進IC 中,一般由分離元件組成前置低噪聲放大器(LNA)和諧振帶通濾波器。汽車收音機射頻電路的作用從時域上看是要將微弱的廣播信號放大,通過自動增益控制電路(AGC)為后級混頻器提供穩(wěn)定的載波信號強度;從頻域上看,它要跟蹤所選擇的電臺信號,濾除掉干擾信號如鏡像頻率(》60dB抑制)和本振頻率,改善射頻信號質量。
射頻電路設計
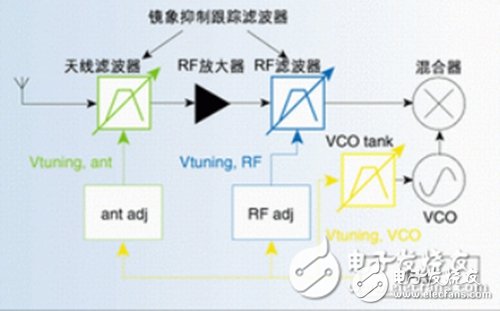
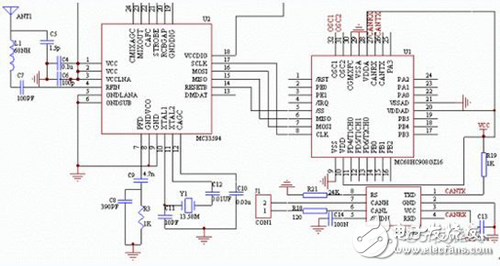
圖1是我們設計的汽車收音機射頻電路方框圖,它由天線濾波器和射頻低噪聲放大器以及諧振帶通濾波器組成。該款汽車收音機的設計目標是噪限靈敏度為 0dBu(30dB S/N)、音頻信噪比64dB、自動搜索靈敏度小于10dBu,具有較強的抗鄰頻道干擾和其它干擾信號能力,實現(xiàn)MCU全自動調整功能。
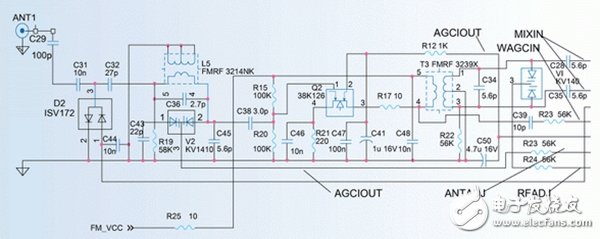
圖2是汽車收音機TDA7513的FM收音機部分射頻前端電原理圖。C31、C32、D2(1SV172)、 C44組成調頻波段天線信號調節(jié)電路,1SV172是VHF~UHF頻段天線信號衰減器,它是電流控制型元件,隨著電流的增大其阻抗減小。它受控于后級 FM寬帶AGC和窄帶AGC合成產(chǎn)生的FMAGC電流,起控點為天線信號電平57dBu。L5、C36、V2(KV1410)、C43、R19、C45組成天線帶通濾波器,帶寬為12MHz左右。該天線濾波器可以人工用無感調批調節(jié)射頻線圈L5,也可以通過MCU調節(jié)變?nèi)?a target="_blank">二極管V2,從而實現(xiàn)自動調整功能。
Q2(3SK126)、C38、R15、R20、C46、R21、C47、C41、R17組成低噪聲射頻放大器,增益為30dB。本設計中選用N溝道場效應管3SK126作射頻放大器具有輸入阻抗高、增益高和噪聲低的優(yōu)點,而且是電壓控制型器件,設計簡單。Q2受控于后級FM寬帶 AGC和窄帶AGC合成產(chǎn)生的FMAGC電壓,起控點為天線信號電平78dBu。T3、C34、V1(KV1410)、C28、C35組成RF諧振帶通濾波器,帶寬為8MHz左右,T3為FM RF變壓器。該帶通濾波器同樣可以人工用無感調批調節(jié)T3,也可以通過MCU自動調節(jié)變?nèi)荻O管V1。接收機的接收極限是由接收機自身噪聲性能決定的,所以在收音機的射頻電路中要求盡量選用低噪聲元件。
——————
TOP2 汽車溫度控制系統(tǒng)電路
汽車溫度控制系統(tǒng)連接器電路
隨著無線通信、信息傳感技術的迅猛發(fā)展和日漸成熟, 通過信息傳感微控制器和網(wǎng)絡將物品聯(lián)接成物聯(lián)網(wǎng), 以實現(xiàn)物品的自動識別、定位、跟蹤、繼電器和管理為目標的服務已成為可能。現(xiàn)代汽車中的空調一般是利用手工進行控制的,空調只有等到司機進入駕駛室才能開啟或關閉,這就使得在炎熱的夏天或寒冷的冬天, 剛進入車內(nèi)時由于空調沒有開啟,人會感覺到異常的燥熱或寒冷,因此設計和制造出能監(jiān)控車內(nèi)溫度并根據(jù)監(jiān)測到的溫度情況來進行提前遠程控制開啟車內(nèi)空調系統(tǒng)的設備便提到人們?nèi)粘I畹淖h事日程上來,本設計就是為滿足這一要求而提出來的。
溫度采集模塊
系統(tǒng)中的溫度采集模塊采用DALLAS 公司生產(chǎn)的高精度、高可靠性的DS18B20 溫度傳感器, 它具有體積小、硬件開銷低、抗干擾能力強、精度高的特點, 采用單總線數(shù)據(jù)通信, 全數(shù)字溫度轉換及輸出, 最高12 位分辨率,精度可達±0.5℃, 檢測溫度范圍為-55℃~+125℃, 因此它能滿足本系統(tǒng)的設計要求。DS18B20 與微控制器的連接電路見圖2 所示。
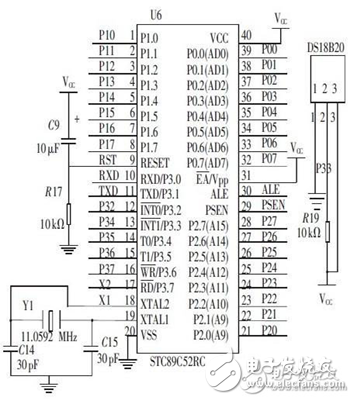
圖2 STC89C52RC 微控制器模塊和DS18B20 的連接電路圖
繼電器開關控制模塊
繼電器開關模塊由TLP521 -4 、ULN2803 和SRD -12VDC 及三極管構成, 由微控制器輸出的信號經(jīng)過三極管構成的開關電路送往TLP521 -4 光耦芯片再通過ULN2803 達林頓管的放大后用來驅動SRD-12DC 繼電器, 進而達到控制空調的各種開關的作用, 繼電器開關控制模塊與微控制器的電路連接圖如圖3 所示。
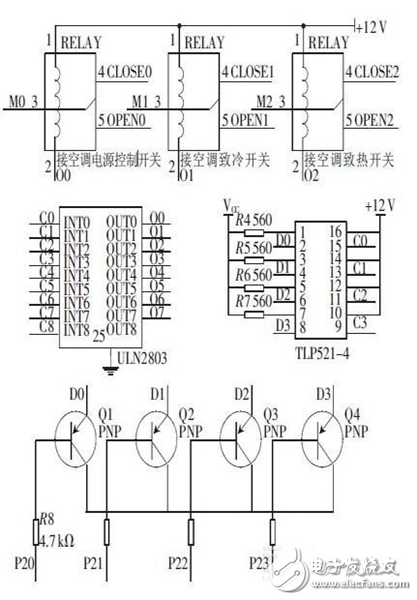
圖3 繼電器控制模塊電路圖
TC35I 模塊
TC35I 模塊是Simens 推出的一款雙頻900/1800 MHz高度集成的GSM 模塊。它設計小巧、功耗很低, 可以為很多通信應用提供經(jīng)濟高效的解決方案。它支持EGS900 和GSM1800 雙頻, 數(shù)據(jù)傳輸?shù)膬?nèi)容支持語音、數(shù)據(jù)、短消息和傳真服務, 通信接口采用RS232( 指令和數(shù)據(jù)的雙向傳送),供電電源采用單電源3.3 V~5.5 V 的電壓, 適用的范圍包括: 便攜電腦的低功耗通信設備、遙測遙感、遠程信息處理和通信等工業(yè)領域。本系統(tǒng)中TC35I 與微控制器的電路連接圖如圖4 所示。
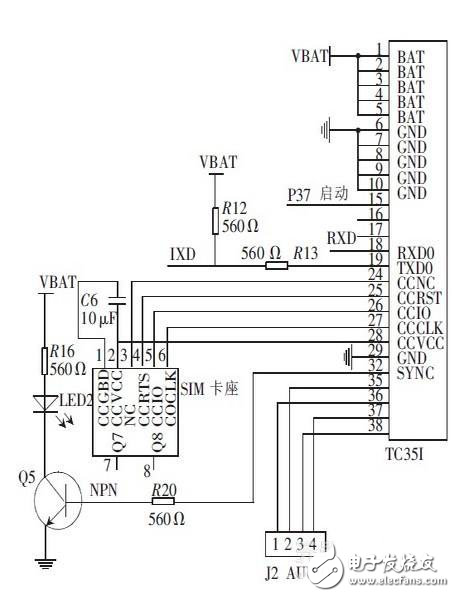
圖4 TC35I 模塊電路連接圖
TOP3 電源模塊設計
系統(tǒng)電源模塊采用了LM78L05 和LM2941S 兩控制器將外部12 V 的直流供電電壓轉換為系統(tǒng)所需要的5 V和4.2 V 的電壓, DS18B20連接電路圖如圖5 所示。
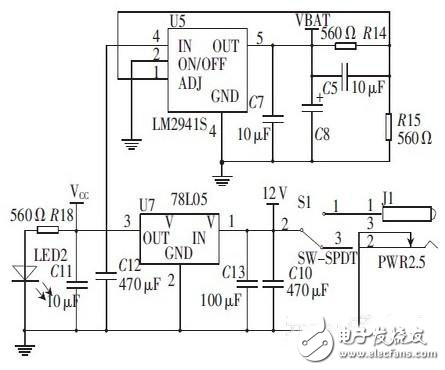
圖5 電源連接電路圖
本文就是從物聯(lián)網(wǎng)的角度出發(fā)提出一種以GSM 無線網(wǎng)絡為基礎, 通過溫度傳感器, 將用戶手機、汽車空調組合成一個小型物聯(lián)網(wǎng)的應用設計。專為基礎的設備汽車空調溫度控制系統(tǒng)設計方法, 經(jīng)實際的制作和調試驗證, 該系統(tǒng)能夠穩(wěn)定、可靠地運行, 該系統(tǒng)還具有擴展方便、無線傳輸距離遠,可廣泛應用于遠距離控制領域。
智能無線網(wǎng)絡汽車測試系統(tǒng)硬件電路
汽車試驗是發(fā)現(xiàn)汽車設計開發(fā)中各種問題的重要手段,依據(jù)試驗結果能對汽車各種性能做出客觀的評價。作為汽車工業(yè)的基礎工程之一,汽車試驗在汽車工業(yè)的整體發(fā)展中發(fā)揮了重要作用。汽車性能測試系統(tǒng)是汽車試驗工程的關鍵組成部分,它是由若干相互聯(lián)系、相互作用的傳感器和儀器設備等元件,為實現(xiàn)對汽車各項性能的測試而組成的有機整體,汽車測試系統(tǒng)的性能往往對整個汽車試驗的效用產(chǎn)生重要影響。
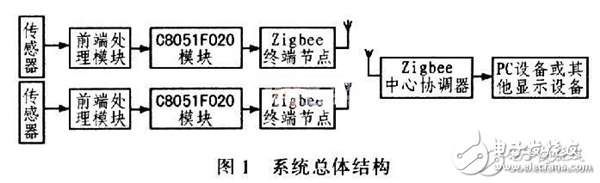
系統(tǒng)總體結構設計
汽車試驗主要包括動力性能、燃油經(jīng)濟性、操縱穩(wěn)定性和排放特性等測試項目,主要性能參數(shù)有速度、加速度、燃油消耗量、溫度以及操縱穩(wěn)定性試驗中的動態(tài)運動參數(shù)等,通過傳感器得到的這些參數(shù)的測試信號,經(jīng)過前端處理模塊處理(整形、濾波、放大等) 后送入C805l-F020微處理器中,在單片機內(nèi)部進行模數(shù)轉換和數(shù)據(jù)處理后通過串口實現(xiàn)與Zigbee終端節(jié)點的連接,再由終端節(jié)點在WLAN中將數(shù)據(jù)發(fā)出,Zi-gbee中心節(jié)點接收到數(shù)據(jù)后經(jīng)串口與上位機進行通訊。中心節(jié)點也可將上位機的命令發(fā)送給終端節(jié)點,控制終端節(jié)點執(zhí)行。系統(tǒng)總體結構框圖如圖1所示。
前端處理模塊
傳感器將各種常見的非電量信號轉換為電量信號,一般都較微弱,前端處理模塊將這些信號進行處理后送至單片機的A/D轉換端口。本系統(tǒng)共有8路傳感器信號,包括2路壓變傳感器信號、2路-5~+5 V電壓信號、2路4~20 mA電流信號和2路熱電偶信號的前端處理。其中壓變傳感器信號和熱電偶信號前端處理硬件電路分別如圖2和圖3所示。
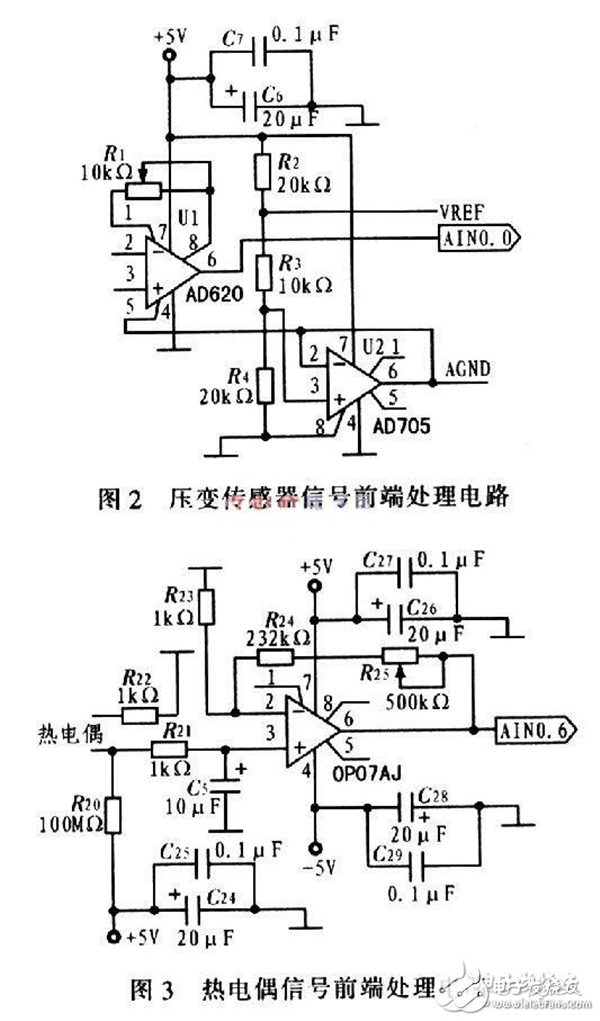
AD620是一款低成本、高精度儀表放大器,僅需1個外部電阻設置增益,增益范圍為l~10 000。對壓變傳感器信號的前端處理采用AD62-0、AD705組成的放大電路,該部分采用單電源供電,AD705是電壓跟隨器,為AD620提供輸出電壓的零點。將VREF、AGND送至MCU的8位精度AD-Cl的AINl.0、AINl.1端口,利用軟件程序實現(xiàn)該路信號的參考電壓和模擬地的計算。熱電偶傳感器用來測量汽車關鍵部件溫度,其前端處理電路采用OP07的可調增益放大電路。OP07是一種低噪聲、非斬波穩(wěn)零的雙極性運算放大器集成電路,具有非常低的輸入失調電壓,低失調、高開環(huán)增益的特性使得OP07特別適用于高增益的測量設備和放大傳感器的微弱信號等。在對精確度要求不高的場合,OP07的失調電壓可忽略,該電路中R25和R24用來調整系統(tǒng)放大倍數(shù),在選用不同類別的熱電偶時可適當調整兩者的阻值。
TOP4 ZigBee節(jié)點模塊電路設計
汽車測試系統(tǒng)初步采用2個終端節(jié)點和1個中心協(xié)調器組成星狀網(wǎng)的拓撲結構,3個節(jié)點均選用SZ05-ADV型無線收發(fā)模塊,Zig-bee終端節(jié)點和中心節(jié)點通過標準串口分別與C8051F020模塊和PC設備相連接,實現(xiàn)數(shù)據(jù)的無線傳輸。SZ05-ADV是高性能嵌入式無線收發(fā)模塊,其核心器件是 Freescale公司的MCl3213。它是第2代標準ZigBee無線通信平臺,在9 mmx9 mmxl mm 7l引腳LGA封裝中集成有低功耗的2.4 GHz RF收發(fā)器和8位微控制器,MCl3213器件具有60 kB的閃存,MCl32lx解決方案能在簡單的點對點連接到完整的ZigBee網(wǎng)狀網(wǎng)絡中用作無線連接,小占位面積封裝中的無線電收發(fā)器和微控制器的組合使其成為成本效益的解決方案,MCl321x中的RF收發(fā)器工作在2.4 GHzISM頻段,和802.15.4標準兼容,收發(fā)器包括低噪音放大器,1 mW的RF輸出功率,帶VCO的功率放大器(PA),集成的發(fā)送/接收開關,板內(nèi)的電源穩(wěn)壓器以及完全的擴展頻譜的編碼和譯碼,MCl32lx中的微控制器基于HCS08系列微控制器單元(MCU),HCS08 A版本,高達60 kB的閃存和4 kB的RAM。
SZ05-ADV嵌入式無線通信模塊集成有符合ZIGBEE協(xié)議標準的射頻收發(fā)器和微處理器,其數(shù)據(jù)接口包括:TTL電平收發(fā)接口、標準串口RS2-32 數(shù)據(jù)接口,可以實現(xiàn)數(shù)據(jù)的廣播方式發(fā)送和目標地址發(fā)送模式。除可實現(xiàn)一般的點對點數(shù)據(jù)通信功能外,還可實現(xiàn)多點之間的數(shù)據(jù)通訊。其模塊連接電路如圖4所示。DATA、RUN、NET、ALARM為SZ05-ADV無線通信模塊的4個工作狀態(tài)指示端口,分別是數(shù)據(jù)收發(fā)、系統(tǒng)運行、網(wǎng)絡狀態(tài)和告警。 SLEEP引腳用來控制系統(tǒng)進入低功耗狀態(tài),低電平進入低功耗,高電平或懸空正常運行。
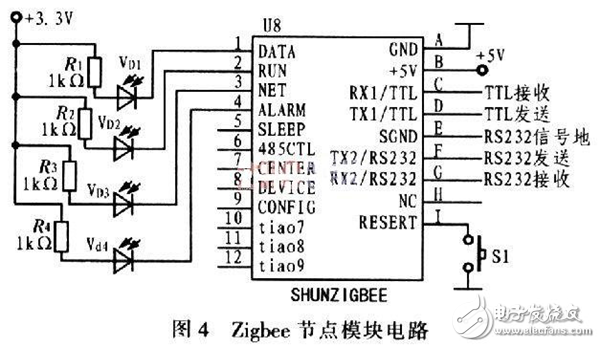
485CTL引腳是485收發(fā)控制,模塊485接收時低電平輸出,發(fā)送時高電平輸出。CENTER、DEVICE引腳是節(jié)點功能配置接口,均為低電平有效,或分別與引腳TIao7、tiao8接跳線帽實現(xiàn),如這2個引腳都為高電平或懸空則為路由節(jié)點。CONFIG引腳是配置接口,低電平有效,或加跳線帽,可在超級終端中進入系統(tǒng)配置狀態(tài)。模塊標準工作電壓為DC-5V,正常工作電壓范圍為5~12V。數(shù)據(jù)接口有RS-232和TTL收發(fā)2種接口模式。 RS-232串口為TX2、RX2、SGND三線工作模式,TTL為TX1、RXl兩線工作模式,TTL電平為3.3V。RESET進入低電平狀態(tài)3s,系統(tǒng)進入配置狀態(tài),高電平或懸空狀態(tài)則進入工作狀態(tài)。
本文設計的基于C805lF020和Zigbee無線網(wǎng)絡的汽車測試系統(tǒng)實現(xiàn)了汽車試驗中數(shù)據(jù)的無線傳輸,簡化了試驗現(xiàn)場布線,提高了試驗效率,實驗證明了該系統(tǒng)取代傳統(tǒng)汽車測試系統(tǒng)的可行性,同時系統(tǒng)的擴展也比較容易,可以實現(xiàn)更多功能。本研究側重于Zigbee 無線網(wǎng)絡的應用開發(fā),可為Zigbee技術在傳感器網(wǎng)絡中的應用提供一定的參考,但局限于軟件程序系統(tǒng)和試驗的電磁干擾,該系統(tǒng)的同步機制和抗干擾性能有待于進一步研究。
汽車駕駛胎壓監(jiān)測系統(tǒng)電路設計
本文就重型車輛上整合TPMS與汽車行駛記錄儀等汽車安全配件,提出一種全新的實現(xiàn)方法,以一個電控單元統(tǒng)一協(xié)調管理取代以往多個汽車安全用品單獨控制,形成汽車安全電控系統(tǒng)。整個汽車安全電控系統(tǒng)由胎壓監(jiān)測系統(tǒng)、倒車雷達裝置、汽車行駛記錄儀等組成,所有裝置均掛接于CAN總線上,共享儀表盤顯示。其中重點介紹TPMS的實現(xiàn)原理。接收顯示部分的軟件由源碼公開的微型實時操作系統(tǒng)uCOS-II來管理,使整個系統(tǒng)的實時性,可靠性進一步提高。
系統(tǒng)各功能模塊設計
發(fā)射模塊
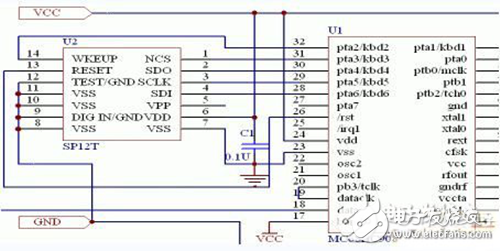
圖2 發(fā)射模塊的傳感器連接電路
發(fā)射模塊安裝在輪胎內(nèi),其測量檢測部分連接電路如圖2所示。傳感器采用Infineon公司的硅壓阻式壓力傳感器SP12T,該芯片胎壓測量范圍為 50~1400KPa,是一款專門為重型車設計的傳感器。SP12T內(nèi)部集成了壓力傳感器、溫度傳感器和電壓傳感器,提供精確的輪胎狀態(tài)信息。 908RF2使用內(nèi)部振蕩器,提供這個單片機的工作時鐘,增強抗干擾能力。SP12T與908RF2之間通過SPI接口相連。908RF2內(nèi)部集成發(fā)射芯片MC33493,使整板面積、成本降低,同時可靠性更高。發(fā)射采用曼徹斯特編碼方式,F(xiàn)SK的調制方式,發(fā)射頻率433.92MHz.
接收顯示主節(jié)點
接收顯示模塊主芯片采用FREESCALE的16位單片機MC9S12DP256,具有5 個CAN接口,2個串口,8路增強型定時器等豐富的內(nèi)部外設,為系統(tǒng)的升級留下較大的空間。CAN0接口用于接收中轉模塊發(fā)送的信息。接收芯片 MC33594接收距離較近的兩前輪的射頻信號,并解碼后以SPI傳輸協(xié)議送給MC9S12DP256.CAN接口芯片采用MAXIM公司的 MAX3050, 為總線提供差分發(fā)射能力,為CAN控制器提供差分接收能力。
本設計硬件上將可靠性高的CAN總線傳輸與直接式胎壓監(jiān)測系統(tǒng)的無線傳輸結合,CAN傳輸避免了用無線中轉模塊引起的相互之間干擾問題。系統(tǒng)完全實現(xiàn)胎壓監(jiān)測的所有功能,有著廣大的實際應用市場。整體可靠性高,穩(wěn)定性好,成本低,利于移植,方便添加其他功能。
TOP5 汽車發(fā)動機轉速表電路設計
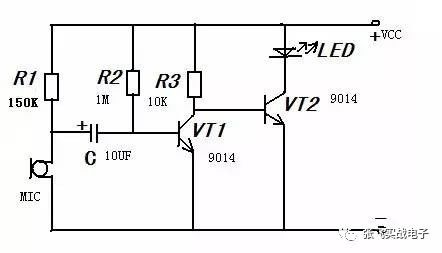
本例介紹的汽車發(fā)動機轉速表,以單結晶體管和集成運算放大器為主要元器件制作而成,
電路工作原理:該汽車發(fā)動機轉速表電路由弛張振蕩器、微分電路、比較放大器和電流表驅動電路組成,如圖所示。
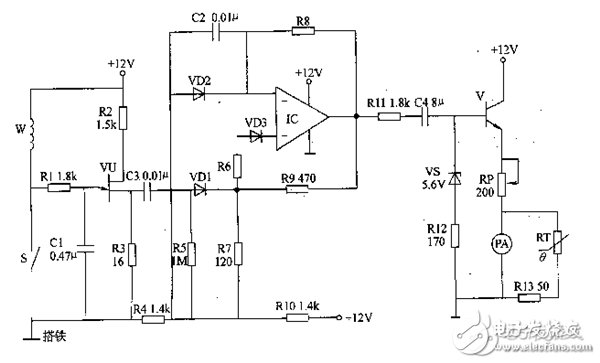
弛張振蕩器電路由電阻器rl-r3、電容器cl和單結晶體管vu組成。
CAN 總線接口電路主要包括:單片機、控制器接口、總線收發(fā)器和看門狗電路等。采用Philips公司生產(chǎn)的SJA1000控制器和與其配套的 82C250CAN收發(fā)器。按照CAN總線物理層協(xié)議選擇總線介質,設計布線方案,連接成CAN網(wǎng)絡。雙絞屏蔽線可設兩套,在兩套介質上同時進行信息傳輸,接收方只用一個介質。在冗余和非冗余段的連接臨界點處進行總線切換。
硬件電路的設計主要是CAN 通信控制器與微處理器之間和CAN總線收發(fā)器與物理總線之間的接口電路的設計。CAN通信控制器是CAN總線接口電路的核心,主要完成CAN的通信協(xié)議,而CAN總線收發(fā)器的主要功能是增大通信距離,提高系統(tǒng)的瞬間抗干擾能力,保護總線,降低射頻干擾(RFI),實現(xiàn)熱防護等。看門狗電路主要是實現(xiàn)對電路的監(jiān)控和復位作用。
目前廣泛流行的CAN總線器件有兩大類:一類是獨立的CAN控制器,如82C200、SJA1000及 Intel82526/82527等,另一類是帶有在片CAN的微控制器,如P8XC582及16位微控制器87C196CA/CB等。本課題選取 PHILIPS公司的SJA1000 CAN控制器以及82C250總線收發(fā)器,主要是考慮到SJA1000支持CAN 2.0A/B規(guī)約。而82C250可以支持110個CAN節(jié)點,并且國內(nèi)市場上PHILIPS的產(chǎn)品型號比較多,購買比較方便。
單片機最小系統(tǒng)
本設計中,應用到單片機為ATMEL公司51系列的89C51,該型號的單片機應用廣泛,技術成熟,市場上價格便宜,而且在學習中所學到的多為該型號,在本次設計中是首選的芯片。89C51單片機作為系統(tǒng)的核心控制部分,但在本設計中不是重點講解內(nèi)容,其相關技術應用和引腳特點功能等,可參照其他相關資料。設計的電路原理方框大致如下圖所示。設計中為避免出現(xiàn)時鐘信號的沖突,對單片機的外接晶振引腳XTAL1、XTAL2不接上外圍電路,而是通過控制器 SJA1000的時鐘信號腳反饋給單片機。同時,對單片機的復位信號處理,RST引腳接上X5045P的RST腳,復位信號可由X5045P輸出,在 X5045P芯片看門狗外圍電路的作用下,減少了以往由電阻、電容組成的簡易復位電路造成的不精確、延時高等不良作用,使單片機回復到初始狀態(tài),完成復位操作。由于在該電路中要用到單片機的存儲作用,存儲由SJA1000傳輸過來的處理數(shù)據(jù)。因此,腳/EA接上高電平,選用片內(nèi)ROM。對ALE腳,也即地址鎖存有效信號除數(shù)端是和控制器 SJA1000的ALE腳接通。
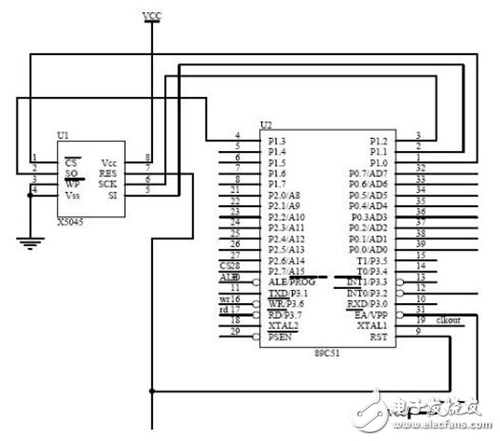
圖2-2 單片機最小系統(tǒng)
基于SJA1000的控制電路設計
控制器SJA1000作為本接口電路中的控制部分,應用本設計中,對于SJA1000和單片機的連接,引腳AD0~AD7是和89C51的輸出輸入腳 P0.0~P0.7相接;SJA1000的片選信號腳/CS必須由微控制器的P2.7口控制否則這個片選輸入必須接到VSS 也可以通過地址解碼控制例如當?shù)刂?數(shù)據(jù)總線用于其他外圍器件,ALE對應ALE,讀/寫輸入腳/WR、/RD,/INT和單片機的/INT0連接,由于在該系統(tǒng)中要用到相同的時鐘頻率,所以我們要時鐘信號引腳CLKOUT和單片機的XTAL1腳相連,達到頻率一致的目的;而在復位信號的處理,可以在看門狗外圍電路的RST信號輸出后再通過和非門電路的相連,很好的實現(xiàn)了電路的復位作用。而對于控制器的收發(fā)引腳TX0,TX1與RX0,RX1,在本系統(tǒng)中 TX0、RX0可和收發(fā)器82C250的TXD、RXD接通。同時,在和CPU接口中SJA1000 支持對兩個著名的微型控制器系列的直接連接80C51 、68xx 。通過SJA1000 的MODE 引腳可選擇接口模式Intel 模式 MODE 高;Motorola 模式 MODE 低。在Intel 模式和Motorola 模式里地址/數(shù)據(jù)總線和讀/寫控制信號的連接。本設計中,正是使用Intel模式。對SJA1000的Vdd1~Vdd3電源輸入腳,外接上驅動+5V電壓;而Vss1~Vss3輸出接地。設計中,對SJA1000提供16Mkz的晶振。
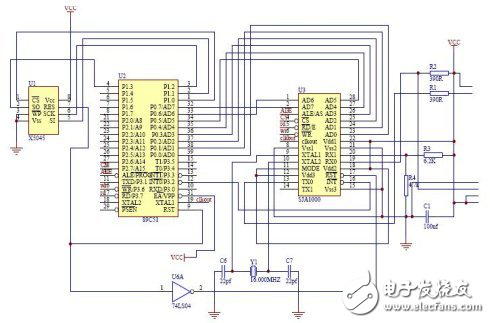
圖2-4 SJA1000控制電路
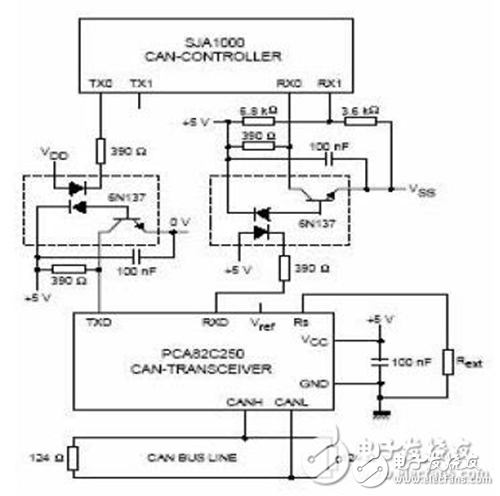
TOP6 基于82C250收發(fā)電路設計
82C250是CAN控制器與物理總線間的接口,可以提供對總線的差動發(fā)送和接收能力,與IS011898標準完全兼容,并具有抗汽車環(huán)境下的瞬間干擾、保護總線的能力。設計中,收發(fā)器的接受、發(fā)送腳原理上要和SJA1000的發(fā)送、接受腳相連接。但這樣一來,兩者的電氣不一致,造成電氣隔離,給通信帶來麻煩。為此,在它們之間接上高速光耦合器6N137,避開了電氣隔離,更好的實現(xiàn)通信聯(lián)系。82C250的TXD、RXT就對應接上6N137的輸出腳OUT和輸入腳 IN;腳Rs作為斜率控制電阻輸入端,電阻的大小可以割據(jù)總線通信速度適當調整一般在16~140KΩ之間,設計中Rs阻值為47KΩ。在通過接一個 47K電阻分流之后,可以接地。電壓引腳Vcc,其電源電壓:4.5V〈 Vcc〈 5.5V,在設計中采用5V電壓。Vref作為基準電壓輸出端,設計中可以接地。而CANH,CANL腳是信號的輸入輸出,實現(xiàn)對電平信號的傳送,通過它們連接上雙絞線,完成通信傳輸。
基于X5045P的電路設計
X5045P在本設計中做為復位、監(jiān)控電路使用,雖然增加了電路連接的復雜和成本,但對于電路的穩(wěn)定和可靠性有起到很大的作用,是系統(tǒng)中不可缺少的部分。對X5045的操作是通過4根口線CS、SCK、SI和SO進行同步串行通信來完成的。SCK是外部輸入的同步時鐘信號。在對芯片定改指令或數(shù)據(jù)時,時鐘前沿將SI引腳信號輸入;在讀郵數(shù)據(jù)時,時鐘后沿將數(shù)據(jù)位輸出到SO引腳上。數(shù)據(jù)的輸入/輸出都是高位在先。在設計中,/CS腳和單片機P1.0、 SI、 SCK、SO、RST分別與單片機的引腳P1.0~P1.3、RST連接。對于不用到的引腳,可以直接和地相連。電路設計如下:
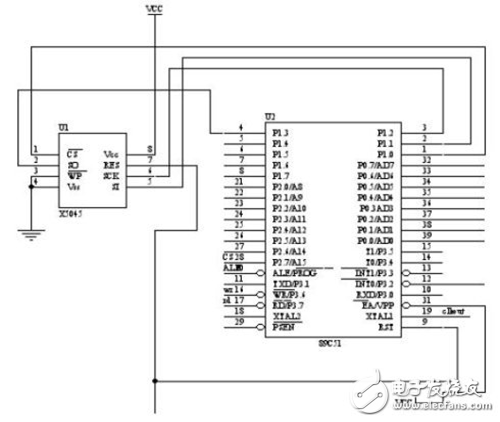
圖2-10 X5045P電路監(jiān)控、復位電路
欲了解視頻監(jiān)控相關解決方案與電路圖設計,可關注電子發(fā)燒友榮譽出品的Designs of week欄目:
電源電路設計
設計中,對系統(tǒng)的電源都一致采用DC+5V電壓,光耦部分電路所采用的兩個電源Vcc和Vdd必須完全隔離。為此,設計電源如下所示:
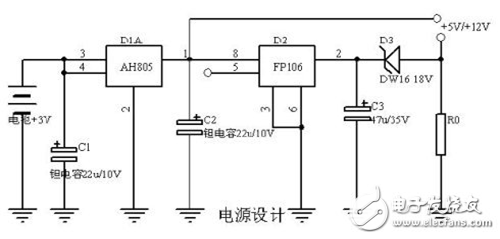
圖2-11 電源電路
它由AH805升壓模塊及FP106升壓模塊組成。AH805是一種輸入1.2~3V,輸出5V的升壓模塊,在3V電池供電時可輸出100mA電流。 FP106是貼片式升壓模塊,輸入4~6V,輸出固定電壓為29±1V,輸出電流可達40mA,AH805及FP106都是一個電平控制的關閉電源控制端。兩節(jié)1.5V堿性電池輸出的3V電壓輸入AH805,AH805輸出+5V電壓,其一路作5V輸出,另一路輸入FP106使其產(chǎn)生28~30V電壓,經(jīng)穩(wěn)壓管穩(wěn)壓后輸出+12V電壓。從圖中可以看出,只要改變穩(wěn)壓管的穩(wěn)壓值,即可獲得不同的輸出電壓,使用十分靈活。FP106的第⑤腳為控制電源關閉端,在關閉電源時,耗電幾乎為零,當?shù)冖菽_加高電平2.5V時,電源導通;當?shù)冖菽_加低電平0.4V時,電源被關閉。可以用電路來控制或手動控制,若不需控制時,第⑤腳與第⑧腳連接。
接口電路總體電路原理圖
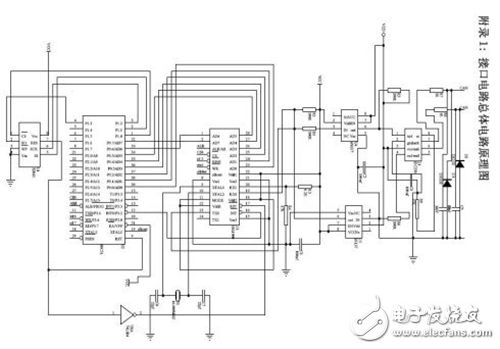
在本電路原理中,控制單元以單片機AT89C51為核心,選用器件SJA1000作為CAN控制器,并選用芯片82C250和6N137、X5045P作為CAN控制器接口和光耦合隔離、復位電路。在實際中,應注意以下幾個問題
1. SJA1000的中斷請求信號INT在中斷允許且有中斷發(fā)生時,由高電來此跳變到低電平,所以INT和AT0C51的INT0直接相連。片選信號CS和單片機引腳P2.7相連,當CS接到低電平時,SJA1000被選中,CPU可對SJA1000進行讀/寫操作。為了增強CAN總線節(jié)點的抗干擾能力。 SJA1000的TX1腳懸空,RX1引腳的電位必須維持在約0.5VCC上,否則,將不能形成CAN協(xié)議要求的電平邏輯。
2. SJA1000的TxD和RxD并不是直接與82C250的TxD和RxD相連而是通過高速光耦合6N137后與82C250相連,這樣就可以很好的實現(xiàn)了總線上個CAN節(jié)點的電氣隔離,不過應該特別說明一點的是光耦部分電路所采用的兩個電源Vcc和Vdd必須完全隔離,否則采用光耦也就失去了意思。電源的完全隔離可采用小功率電源隔離模塊或帶多5V隔離輸出的開關電源模塊實現(xiàn),這些部分雖然增加了節(jié)點的復雜,但是卻提高了節(jié)點的穩(wěn)定性和安全性,保護 CAN控制器正常工作。
現(xiàn)場總線標準及其技術日益成為國際自動控制領域關注的一大焦點,其原因是它改變了傳統(tǒng)控制系統(tǒng)的結構,形成了全新的網(wǎng)絡集成分布式控制系統(tǒng)。在我國,現(xiàn)場總線已經(jīng)發(fā)展到推廣應用階段,中國已經(jīng)成為各種現(xiàn)場總線激烈爭奪的重要戰(zhàn)場。因此研究現(xiàn)場總線技術及其產(chǎn)品就顯得尤為重要。本文正是基于控制器 SJA1000和82C250收發(fā)器的基礎上,外接上看門狗電路芯片X5045P及高速光耦合器6N137,設計CAN總線接口電路,該電路理論上很好的實現(xiàn)了設計原理要求。該設計簡單明了,在電路實現(xiàn)時,還需考慮各模塊間的接地、屏蔽等諸多問題。PCA82C250提供對物理總線的符合CAN電氣協(xié)議的差動發(fā)送和接收功能,另外,它具有的電流限制電路,還提供了對總線的進一步的保護功能。通過 82C250與物理總線進行連接,可使總線支持多達110個節(jié)點的掛接。對于CAN控制器及帶有CAN總線接口的器件,82C250并不是必須使用的器件,因為多數(shù)CAN控制器均具有配置靈活的收發(fā)接口并允許總線故障,只是驅動能力一般只允許20~30個節(jié)點連接在一條總線上。











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論