 電子發燒友App
電子發燒友App


總體方案選擇與設計
方案論證與比較
① 主電路及調整方式的選擇
方案一 開關穩壓調整
??? 開關穩壓調整方式效率高,普遍應用于計算機等現代數字儀器中,但一般紋波較大,難以控制,很有可能造成設計的失敗和技術參數的超標。
方案二 串聯反饋調整
??? 該方案采用負反饋網絡,從輸出電壓取樣與基準電壓比較,并將誤差經放大器放大后反饋至調整管,使輸出電壓在電網電壓變動的情況下仍能保持穩定。該電路輸出電壓穩定性好,負載調整率高,引入的負反饋使紋波電壓大大減小,且電路簡單、容易調試。但其屬于線性穩壓源,即調整管工作在放大區,因而功耗比較大。
方案三 綜合以上兩種方案
??? 結合開關穩壓調整與串聯反饋調整的優點,在串聯反饋調整的基礎上增加一級預穩壓,構成智能恒壓差系統,在保證調節范圍的基礎上減少功耗。
② 控制方案的論證比較
方案一 計數式數字電路控制
??? 此方案使用計數器來來控制輸出電流的步進,是一種采用小規模數字電路的控制方法。其優點是不需要軟件支持,但元件多、硬件電路復雜、控制呆板、步進難以改變,且精度不高,難以達到設計要求。
方案二 CPLD控制
??? 采用大規模數字邏輯電路CPLD,能夠實現高精度控制,功耗也不大,但其成本高、設計復雜。
方案三 單片機控制
??? 單片機控制系統具有成本低、控制靈活的特點,通過軟件的編制能夠實現多種控制算法,且控制精度高、功耗低;特別是現代的增強型單片機,具有D/A、A/D、PWM、ICP等多種功能,能夠單片完成較復雜的控制要求,所以選擇單片機控制方式。
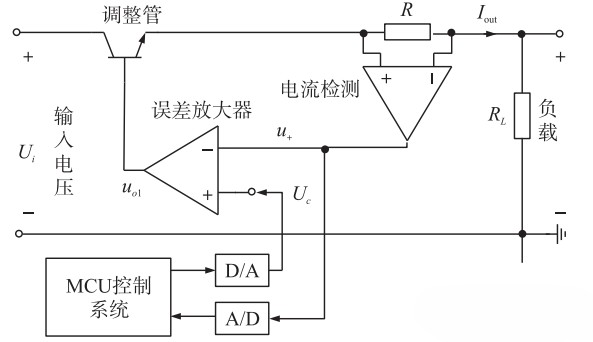
總體方案設計
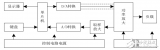
??? 綜上所述,我們設計了響應速度快的模擬內環和調節精度高的數字外環雙閉環調節系統。此系統通過面板按鍵對電流值進行預置,單片機輸出相應的數字信號,經過PWM控制、信號放大、電平轉換,通過串聯式穩壓調整管輸出電流信號。實際輸出的電流再利用精密電阻采樣變成電壓信號,經過高輸入阻抗、高精度放大器、A/D轉換器,將信號反饋到單片機中。單片機將輸出反饋信號再與預置值比較,送出調整信號,再輸出新的電流。這樣就形成了模擬內環和數字外環的雙閉環調節,提高了輸出電流的范圍、精度、電壓調整率和負載調整率,降低了功耗和紋波,并且電路簡單、步進可調、可擴展能力強(見圖1)。

圖1 總體設計方案
??? 電流源的硬件部分主要由單片機系統及A/D接口電路、PWM智能控制恒壓差及串聯調整模塊、鍵盤與顯示電路、控制電源模塊等組成。下面將分別對各部分進行分析并給出實現方案。
1 單片機系統及A/D接口模塊
??? 單片機選P89LPC938,它是基于80C51內核的高速、低功耗的帶片內8Kb F1ash的8位單片機,其指令執行時間只需2~4個時鐘周期,6倍于標準80C51器件。P89LPC938內部主要集成了字節方式的I2C總線、SPI接口、UART通信接口、實時時鐘、EEPROM、PWM、ICP、A/D轉換等一系列有特色的功能部件。
??? 本設計需要三路A/D采樣,其中對電流的采樣要有很高的精度,考慮到控制精度要求,我們用16位的ADS1100芯片(含PGA放大器)對輸出電流進行采樣,用938單片機的10位A/D轉換器對另外兩路信號進行采樣(P0.1,P0.2)。
??? 由于P89LPC938和ADS1110內部均帶有I2C總線,所以它們的連接很簡單。P89LPC938的P2.2,P2.3,P2.4,P2.5腳用于鍵盤顯示功能,P2.6,P1.6用于PWM的輸出。
2 PWM智能控制恒壓差及串聯調整模塊
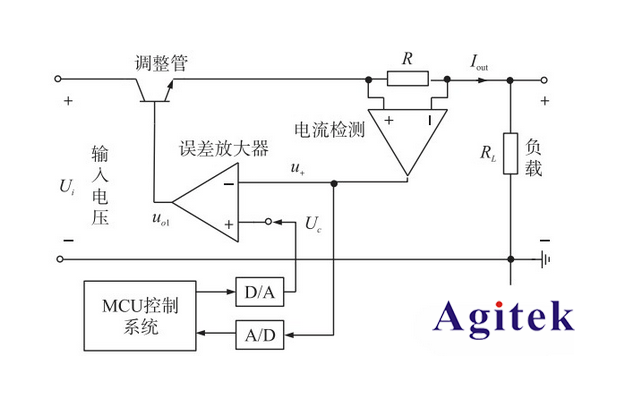
??? 此部分是整個硬件設計的核心,它直接關系到輸出電流的范圍、精度、紋波與電路的功耗。經過反復調試,我們設計的系統結構如下(見圖2)。
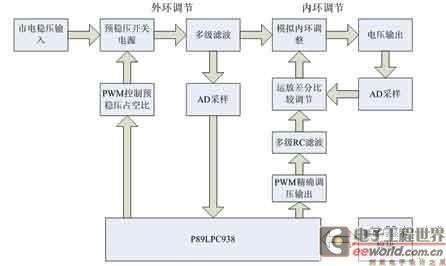
圖2 系統總體框圖
① 開關電源預調整部分
??? 如圖2所示,由于輸出電壓不能超過10V,為了提高效率,減少紋波,先通過降壓變壓器及整流橋將220V的交流電整成約18V的直流電,通過開關管Q1、Q2,續流二級管D5,儲能電感L1、L2和濾波電容C1、C2,構成預穩壓開關電源。單片機通過自帶的兩路A/D對串聯調整部分中達林頓管集電級和發射級的電壓進行采樣(AD0,AD1),通過它們的差值來調整PWM1的占空比,穩定開關電源的輸出,從而構成智能恒壓差控制系統。這樣,既可保證串聯調整電路所需的電壓差,又降低了串聯調整電路輸出的損耗,提高了恒流模塊的整體效率。在整個模塊輸入電壓發生較大變化時也能進行高精度穩流,由于開關頻率遠高于工頻,紋波也會因此大大降低。
??? 對于Q1、Q2,已知β=30,最大電流為2A,Ui=18V,有:
I=2/β=0.067A???????????? (1)
R1=(Ui-0.7-0.3)/IR1=254Ω (2)
??? 取R1為270Ω,938管腳輸出的最大電壓為3V,通過R2的電流為:
IR2=IR1/β=0.067/30=0.0022A (3)
R2=(3-0.7)/IR2=1K????? (4)
??? 由于本設計對紋波的要求比較高,所以穩流電感L1、L2和濾波電容C1、C2的選取值至關重要。設電感L1的輸入電壓Vi,電感L2的輸出電壓Vo,則占空比為:
D=Vo/Vi=0.722???????????? (5)
??? 設工作頻率fS=10kHz,則TS=0.0001S,負載R取5Ω,紋波電壓為輸入電壓的0.5%,即ΔVo/Vo=0.5%,則:
L1=L2=(1-D)RTS/2=69.5μH?? (6)
C1=C2=VoDTS2/8LΔVo=2500μF? (7)
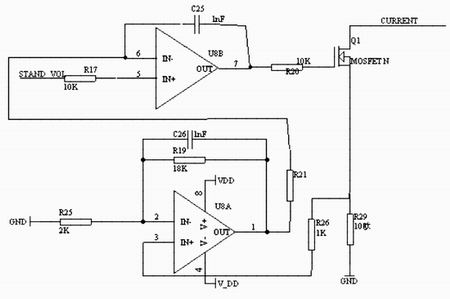
② 串聯調整部分
??? 這部分將單片機輸出的PWM方波通過多級RC濾波,形成平穩的基準電壓,作為模擬內環的給定值,電流輸出范圍20~2000mA,步長最小1mA,共有1880個數值。938的捕獲/比較單元內部是16位的定時器,輸出至PWM2的占空比有65536種狀態,滿足要求。
??? 由于938單片機的A/D采樣電壓不能超過3V,而調整管的發射級輸出電壓最大為10V,集電級電壓穩至13V,均超采樣的最大值,所以要進行分壓。R3、R4、R5、R6為分壓電阻,R4、R6可調,取R3=3.3KΩ,R4=1kΩ,R3=2.2kΩ,R3=1KΩ,可滿足要求。
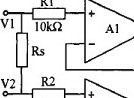
??? R8為采樣電阻(采用電流表中的標準分流電阻,穩定性好,精度高),其值取為0.1Ω,它將輸出電流以電壓的方式輸入到放大器A2的同相端。其中,R12為保護電阻,其上的電流可以忽略不計。放大器的輸出經ADS1110高精度A/D轉換器反饋到單片機,與給定進行比較,構成外部數字閉環控制。設A2的輸入電壓為U1,輸出電壓為U2,根據電流相等有:
??? (U2-U1)/R13=U1/(R14+R15)? (8)
??? 可得放大倍數為:
??? U2/U1=R13/(R14+R15)+1?? (9)
??? U1最大為0.1Ω×2A=0.2V,U2最大為3V,所以放大器A2的放大倍數設置為15較為合理。據此可取R13為10kΩ,R14為0.5kΩ,可變電阻R15取為1kΩ,其放大倍數范圍為6.7?20,滿足要求。
??? 內環模擬調節由調整管Q3、Q4、差動放大器A1(輸入阻抗高,具有較高的共模抑制比)及輔助元件構成,采樣電壓通過放大器A2輸入到差動放大器的反向端,PWM2輸出電壓濾波后到差動放大器的同向端,當輸出電流低于設定值時,差動放大器輸出為正,調整管導通,輸出電流增大,直到與設定值相等。
??? D7、D8、D9、Q5組成過流保護電路,若輸出電流由于干擾偏離給定值太大時,差動放大器輸出電壓便很大。當其超過 0020一定值時,Q5便導通,切斷調整管的基極電流,關閉輸出,起到了過流保護的作用。
3 鍵盤及顯示模塊
??? 鍵盤與顯示模塊的工作原理如下:單片機通過DIN端口,將需要顯示數據的端碼和位碼信息在SCLK脈沖的控制下分別移入到兩片74HC164和595中,段碼在164中,位碼在595中,之后通過RCLK脈沖送出位碼信息完成數據顯示。ReadKey端口是鍵盤檢測口。在該部分的軟件先取數據輸出顯示,顯示后緊接著查詢ReadKey端口(對應位碼)是否為低電平,如果為低電平則記錄送出的位碼信息。之后,進行第二次循環,顯示數據并查詢ReadKey端口,當ReadKey端口為高電平或是在ReadKey端口為低電平時記錄的位碼信息與上次不相同時放棄鍵處理;當兩次讀ReadKey端口為低電平記錄下的位碼信息相同時進行相應的鍵處理操作。
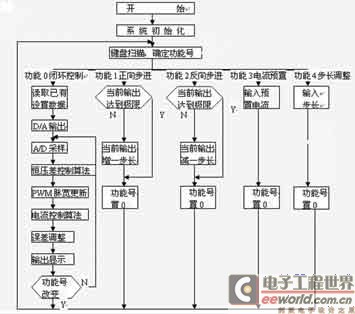
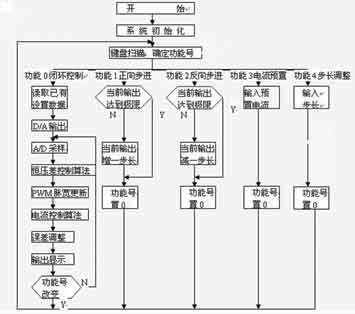
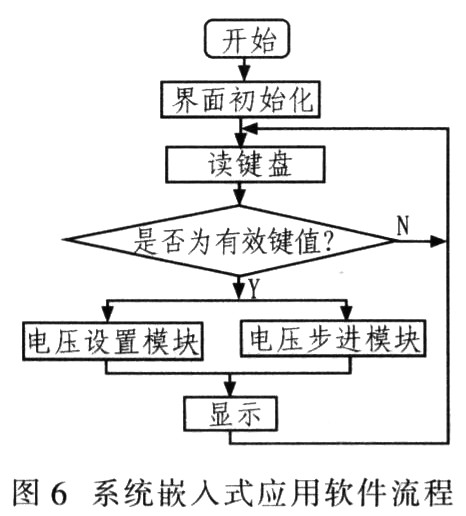
圖3 主程序流程圖
主程序設計
??? 在系統加電后,主程序首先完成系統初始化,包括ADS1110、I2C口、SPI口、中斷、定時/計數器、CCU中與PWM輸出相關的寄存器等工作狀態的設定,給系統變量賦初值,顯示上次預置值等;然后掃描獲取鍵值,執行相應的功能子程序。當啟動鍵按下后,根據預置值、步長等參數計算對應輸出的數字量,再進行閉環反饋調整。
測試數據與結果分析
1測試器材
??? DF1930數字毫伏表、Thurlby1905a型數字表(四位半電壓表)、100M雙蹤數字存儲示波器TDS2012、直流穩壓電源LPS-305(0?30V/3A)、六位半數字多用表HP34401A、電阻箱(0.5?5Ω、5?50Ω、50?500Ω)。
測試方法、數據與結果分析
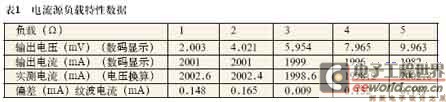
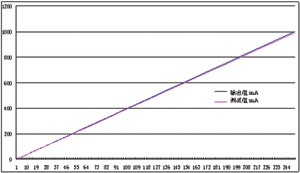
??? 設定輸出電流2000mA,負載電阻由0.5?5Ω變化時,電流源負載特性數據及紋波計算如表1。
由表1可知,最大偏差ΔImax=2.8mA,紋波電流的平均值為0.129mA,最大值為0.191mA,滿足高精度、低紋波的要求。
??? 本設計的創新之處是綜合考慮了精度、紋波、功耗、復雜度等方面的要求,較好的完成了一個高精度數控直流電流源的設計制作與調試,達到了較高的技術指標。但是,看似簡單的電源,也有很多值得仔細研究的地方,比如電路的穩定性(如何克服閉環振蕩,包括寄生振蕩),精度的提高,紋波的減少,動態響應的品質及造成測量誤差的諸方面,這些都值得我們更進一步地研究與學習。

















 工商網監
工商網監
評論