 電子發燒友App
電子發燒友App


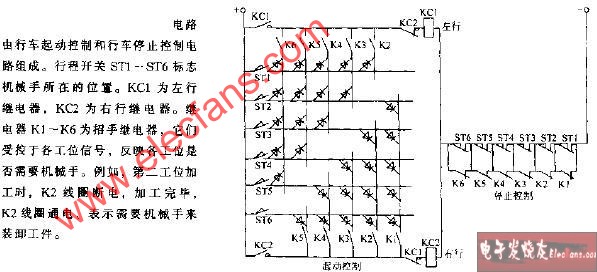
機械手電機驅動電路

- 驅動電路(107063)


相關推薦
選擇伺服機械手要注意哪些細節?
對伺服機械手的功能和易用性進行評估。全伺服機械手它具有動作靈活可控、定位準確可靠、負載驅動力高、環境適應力強等特點。目前,多自由度機械手廣泛應用于鋼鐵、海洋、石油
2023-10-18 08:07:45 160
160
160

PLC經典實例:簡易機械手的PLC控制線路與程序詳解
一、系統控制要求 簡易機械手的結構如圖5-9所示。M1為控制機械手左右移動的電動機,M2為控制機械手上下升降的電動機,YV線圈用來控制機械手夾緊、放松,SQ1為左到位檢測開關,SQ2為右到位檢測開關
2022-12-05 13:47:0017716
17716四軸聯動簡易機械手的結構及動作過程
步進電機驅動縱軸上升,另一個步進電機驅動橫軸開始向前走;轉盤直流電機轉動使機械手整體運動,轉到貨物接收處;步進電機再次驅動縱軸下 降,到達指定位置后,氣閥放氣,機械手松開貨物;系統回位準備下一次動作。
2022-11-17 10:30:442155
2155高速碼垛機器人機械手臂的構成
碼垛機械手臂主要由執行機構、驅動機構和控制系統三大部分組成。高速碼垛機器人機械手臂是一種多自由度的全自動關節式機械手,其機械系統主要由4個關節部分組成能實現4種運動,基座旋轉、連桿結構的手臂結構前后和上下運動、手腕回轉動作與手爪的伸縮和抓取運動并由交流伺服電機驅動。
2021-08-23 16:44:491273
1273仿生機械手用什么電機,如何尋找仿生機械手電機
手進行抓取、轉移工件或料理東西的機電一體化自動裝置。仿生機械手一般用什么電機? 超聲電機作為一種新型的微電機,不像傳統的電機那樣,利用電磁的交叉力來獲得其運動和力矩。超聲電機則是利用壓電陶瓷的逆壓電效應和超
2021-07-13 17:31:181809
1809仿生機械手一般用什么電機?
機械手可代替人的繁重勞動以實現生產的機械化和自動化,能在有害環境下操作以保護人身安全,因而廣泛應用于機械制造、冶金、電子、輕工和原子能等部門。機械手是一種能模擬人的手臂動作,依照設定程序、軌道和請求,代替人手進行抓取、轉移工件或料理東西的機電一體化自動裝置。
2021-07-13 14:37:55 0
0
0全自動碼垛機械手的優點是怎樣的
從國內市場來看,生產制造業全自動碼垛機械手遍及使用汽車零部件行業、包裝機械、環保機械、儀器儀表等自動化行業,而很多新行業對全自動生產制造業碼垛機械手的需求量也不斷上升,推動著碼垛機械手的開展。傳統
2021-05-27 14:58:141443
1443金屬沖壓機械手的種類繁多,它們該如何分類
分類。 按驅動方式可分為機械式機械手、液壓式機械手、氣動式機械手和電動式機械手等。 按搬運重量可分為微型機械手、小型機械手、中型機械手和大型機械手等; 按坐標型式可分為直角坐標式機械手、圓柱坐標式機械手、極坐標式
2021-02-24 15:12:55439
439機械手臂是機械人技術領域中的一種自動化機械裝置
根據軸關節的多少命名幾軸機械手臂,同時軸關節越多自由度越高,也就是作業范圍角度越大。目前市場上最高限度是六軸機械手臂,但并不是軸越多越好,這要看實際的應用需要。 機械臂是由執行機構、驅動機構和控制系統組成的。
2020-12-14 11:32:533927
3927基于SJA1000芯片和82C250芯片實現機械手控制系統的設計
物料搬運機械手由機械手和物料分揀兩部分裝置組成。如圖1所示,機械手主要由機座(采用步進電機驅動旋轉)、水平手臂(采用直線坐標氣缸HMP-20-200)、垂直手臂(采用滑塊氣缸SLT-16-50)、氣
2020-05-17 10:10:001480
1480
生產線搬運機械手電氣控制系統的硬件開發和軟件設計等資料說明
介紹一種生產線搬運機械手電氣控制系統,以PLC為核心進行系統的硬件開發和軟件設計。闡述機械手的結構、工作原理,合理選取系統硬件,詳細設計步進驅動控制程序和HMI監控系統,實現搬運機械手夾放、定位和監控等功能。
2019-05-13 08:00:007
7機械手的詳細資料合集十二個文檔免費下載
電氣動控制設計,基于機械手夾持誤差的手指設計,氣動機械手,氣動通用機械手的設計說明書,示教再現式機械手腕部驅動擺動油缸的基本參數與密封問題,液壓機械手握力的軟抓取控制,一種氣動機械手夾持機構的設計,一種氣動柔性機械
2019-04-22 08:00:0027
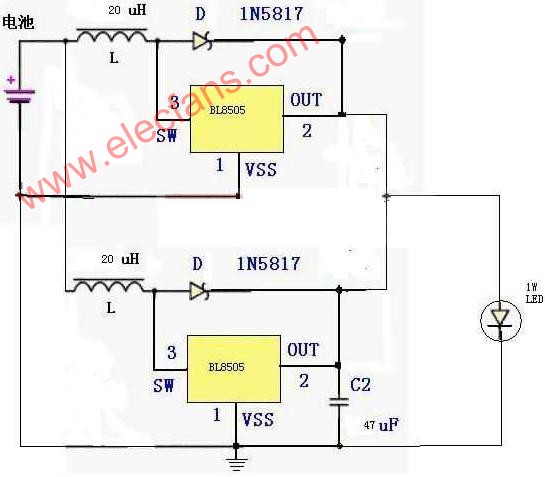
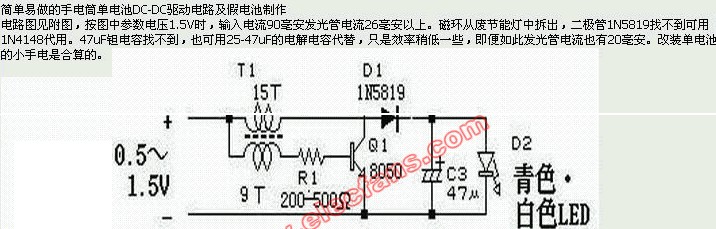
27LED手電筒驅動電路原理
關鍵詞:LED , 驅動電路 , 手電筒 市場上出現一種廉價的LED手電筒,這種手電前端為5~8個高亮度發光管,使用1~2節電池。由于使用超高亮度發光管的原因,發光效率很高,工作電流比較小,實測
2018-10-22 22:45:011442
1442列車預裝配柔性機械手設計
平臺機械手定位方法;設計了可重復利用、驅一動分離的自動化、低成本高鐵車廂預裝配柔性實驗平臺機械手;通過ANSYS有限元分析T具對機械手關鍵零部件的強度進行了分析,驗證了機械手結構的安全可靠性,獲得了機械手的優化結
2018-03-20 17:59:270
0串聯機械手空間軌跡運動控制方法研究
仿真。然后搭建以DSP+FPGA為控制器的六軸機械手系統,其中DSP主要負責機器人運動學計算和軌跡規劃,FPCA則通過數字積分法完成了各關節電機驅動的脈沖分配,以此驅動各關節電機到指定位置。進一步開發了用戶友好的交互式圖形界面,實時顯示機械手的運行
2018-02-01 15:15:062
2_基于Arduino的體感機械手設計
互聯網+和工業技術的相互結合,更多的智能化的產品逐漸面世。而文中則將當下較為熱門的體感操作和傳統工業中的機械手相互結合,探索一種全新的機械手操作方式體感操作機械手。區別于傳統的機械手的示教編程的操作方式,體感機械手利用體感傳感器
2018-01-22 17:14:588
8基于RFID技術的機械手生產框架管理
隨著機械手應用的迅速發展,機械手應用領域也越來越多,尤其是在那些對人員產生傷害的方面, 因此機械手零件的品種也開始多種多樣,產量也隨之提高。而面對繁雜多樣的機械手零件品種和龐大的數量,傳統的生產管理
2017-12-12 19:45:02425
425
基于PLC的機械手混合驅動控制
通過對物料搬運機械手裝置結構與功能的介紹,提出了一種電氣伺服和氣動伺服相結合的混合驅動機械手結構類型,重點分析了基于45, 的機械手控制系統組成,并詳細論述了以45, 為核
2011-08-15 17:49:36101
101機械手拆除步驟及注意事項
提醒廣大機械手用戶朋友,在拆除機械手的時候,應注意以下步驟: 1.關掉射出機電源。 2.關掉機械手電源。 3.關掉機械手氣壓源。 4.洩除空壓。 5.放
2010-07-28 09:51:233350
3350機械手的順序控制系統的設計
控制要求:機械手一個工作周期可分為八步:第一步是當左工作臺上有工件出現時,I1.5=1,機械手開始下降,下降到位時,I0.5=1,停止下降,第一步結束。第二步是機械手
2010-07-08 12:35:5466
66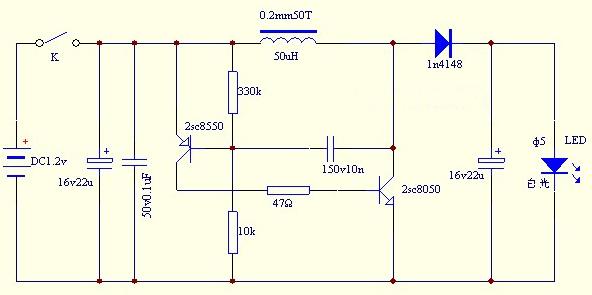
電子機械手臂驅動電路板值設計與實現
電磁機械手臂驅動電路板之設計與實現本裝置主要使用慧魚電控積木來設計電磁機械手臂之機構,使用慧魚電控積木來設計之原因為其質輕容易施工。另外在驅動部分使用直流
2009-11-17 18:06:0487
87PLC在機械手步進控制中的應用
PLC在機械手步進控制中的應用
機械手是工業自動控制領域中經常遇到的一種控制對象。機械手可以完成許多工作,如搬物、裝配、切割
2009-06-19 14:11:081281
1281
基于 CAN 總線的機械手控制系統The Control S
基于現場總線的開放結構機械手控制系統是目前機械手控制的發展方向。文章通過對物料搬運機械手裝置及其控制系統的介紹,提出了基于CAN 總線的機械手控制系統方案,分析了
2009-06-03 09:10:2928
28PLC控制的機械手
本文介紹了OMRONC60P可編程控制器對機械手的控制,包括PLC和I/O的分配圖和接線圖,應用簡潔的移位寄存指令SFT即可獲得步進電機所需的脈沖序列,以 驅
2009-05-31 14:53:0752
52
LED手電筒驅動電路及原理圖介紹
LED手電筒驅動電路及原理圖介紹
市場上出現一種廉價的LED手電筒,這種手電前端為5~8個高亮度發光管,使用1~2節電池。由于使用超高亮度發
2009-05-16 01:13:0010870
10870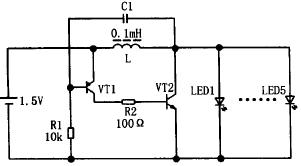
PLC控制機械手設計
PLC機械手控制的實現二、設計要求:1. 闡述機械手的工作原理2. 如何實現PLC對機械手的控制3. 機械手控制程序設計第一節 機械手的工作原理1.1 機
2008-12-13 14:15:22365
365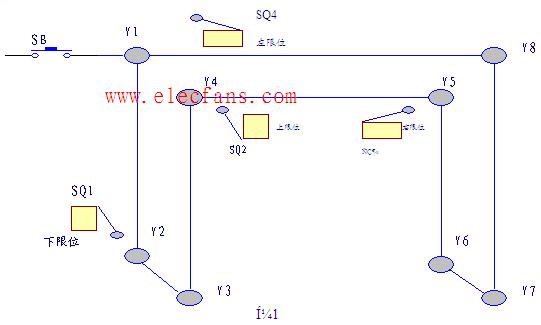





 工商網監
工商網監
評論