 電子發燒友App
電子發燒友App


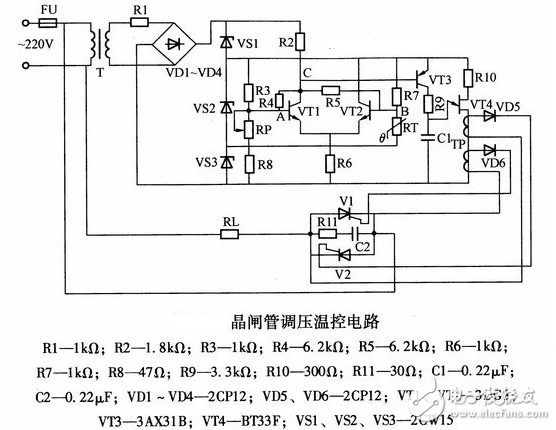
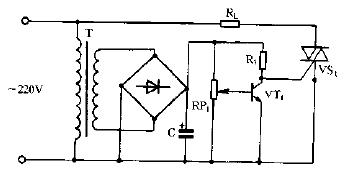
晶閘管調速電路圖(五)
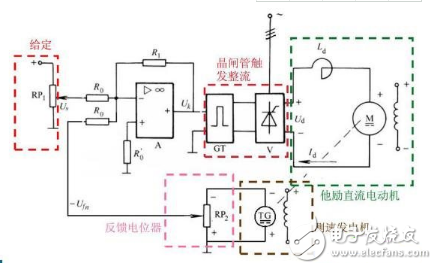
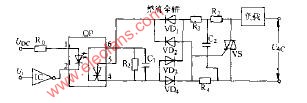
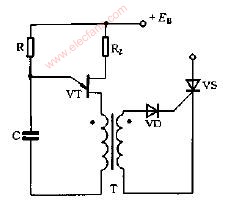
由下圖可見該系統的控制對象是直流電動機M,被控量是電動機的轉速n,晶閘管觸發及整流電路為功率放大和執行環節,由運算放大器構成的比例調節器為電壓放大和電壓(綜合)比較環節,電位器RPl為給定元件,測速發電機TG與電位器RP2為轉速檢測元件。
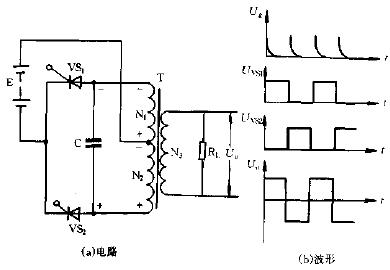
晶閘管調速電路圖(六)
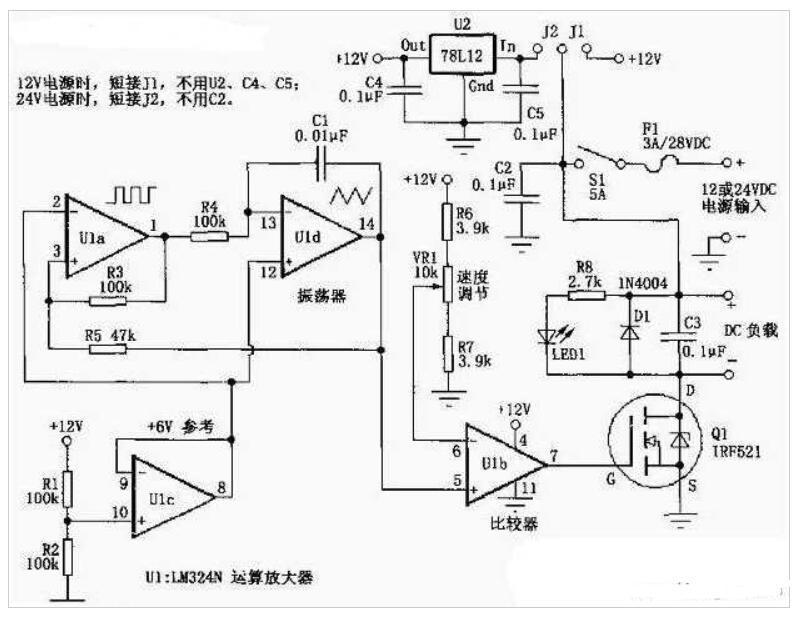
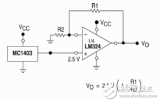
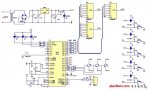
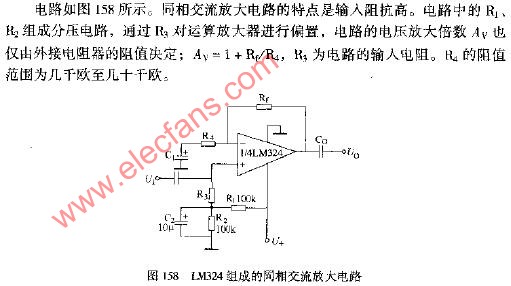
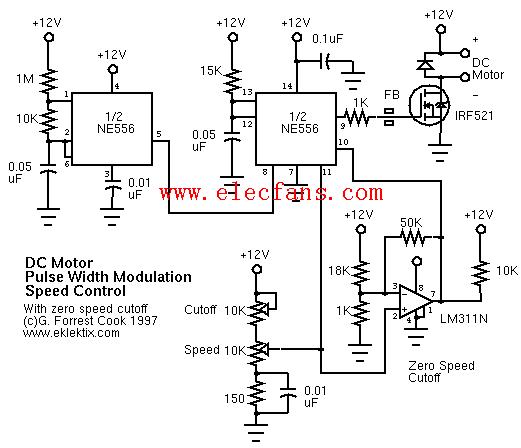
基于LM324的PWM直流電機調速電路圖
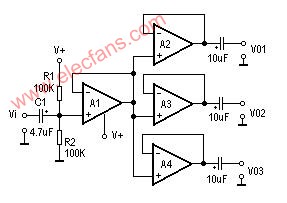
它主要由U1(LM324)和Q1組成。
圖1中,由U1a、U1d組成振蕩器電路,提供頻率約為400Hz的方波/三角形波。U1c產生6V的參考電壓作為振蕩器電路的虛擬地。這是為了振蕩器電路能在單電源情況下也能工作而不需要用正負雙電源。U1b這里接成比較器的形式,它的反相輸入端(6腳)接入電阻R6、R7和VR1,用來提供比較器的參考電壓。這個電壓與U1d的輸出端(14腳)的三角形波電壓進行比較。當該波形電壓高于U1b的6腳電壓。U1b的7腳輸出為高電平;反之,當該波形電壓低于U1b的6腳電壓,U1b的7腳輸出為低電平。由此我們可知,改變U1b的6腳電位使其與輸入三角形波電壓進行比較。就可增加或減小輸出方波的寬度,實現脈寬調制(PWM)。電阻R6、R7用于控制VR1的結束點,保證在調節VR1時可以實現輸出為全開(全速或全亮)或全關(停轉或全滅),其實際的阻值可能會根據實際電路不同有所改變。
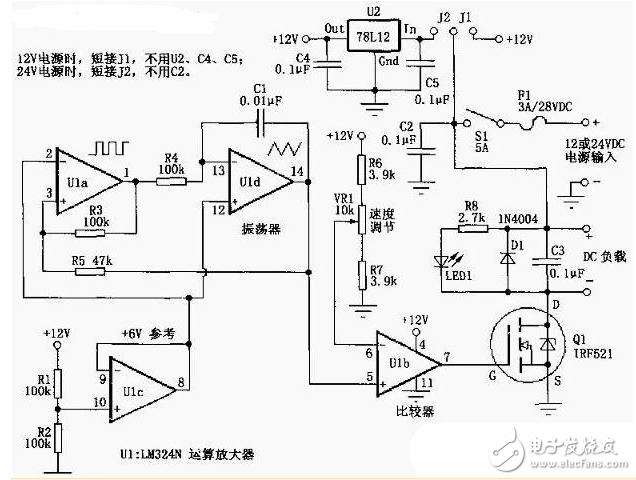
圖1中,Q1為N溝道場效應管,這里用作功率開關管(電流放大),來驅動負載部分。前面電路提供的不同寬度的方波信號通過柵極(G)來控制Q1的通斷。LED1的亮度變化可以用來指示電路輸出的脈沖寬度。C3可以改善電路輸出波形和減輕電路的射頻干擾(RFI)。D1是用來防止電機的反電動勢損壞Q1.
當使用24v的電源電壓時,圖1電路通過U2將24V轉換成12V供控制電路使用。而Q1可以直接在21v電源上,對于Q1來講這與接在12v電源上沒有什么區別。參考圖1,改變J1、J2的接法可使電路工作在不同電源電壓(12V或24V)下。當通過Q1的電流不超過1A時,Q1可不用散熱器。但如果Q1工作時電流超過1A時,需加裝散熱器。如果需要更大的電流(大于3A),可采用IRFZ34N等替換Q1.













 工商網監
工商網監
評論