

















本文只分析控制方位角方向的電路,以控制東西方向旋轉的電路為例,控制南北方向旋轉的電路原理與之相同。圖3所示電路是從整個控制電路中抽取了控制方位角方向的部分電路,從圖3電路中可知,電阻R1、R2和光敏電阻RXI、RDONG組成橋式比較電路,上臂接電源正,下臂接電源負。當光照強度在這兩個光敏電阻上不同時,其中間點輸出偏置電壓V=12&TImes;RXI/(RDONG+RXI)與兩個電阻R1和R2產生的參考電壓VREF=12&TImes;R1/(R1+R2)=6V進行比較。當光敏電阻RDONG受到的光照強度大時,則光敏電阻RDONG比光敏電阻RXI的阻值小,中間偏置點電壓大于6V,則作比較器使用的LM423(U1:A)就輸出1,LM324(U1:D)就輸出0,這兩個信號驅動直流減速電機轉動,直到中間點輸出偏置電壓為6V為止;當光敏電阻受到的光照強度大時,則光敏電阻RXI比光敏電阻RDONG的阻值小,中間偏置點電壓小于6V,LM423(U1:A)就輸出0,LM324(U1:D)就輸出1,這兩個信號驅動直流減速電機轉動,直到中間點輸出偏置電壓為6V為止。具體工作流程如圖4所示。
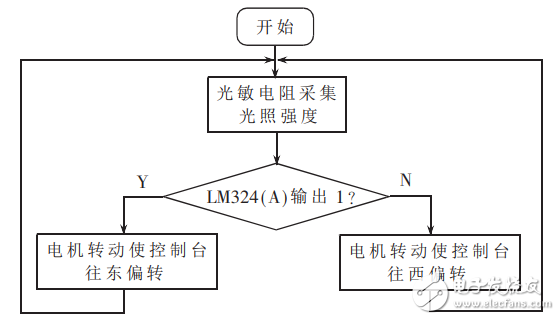
圖4工作流程圖
3、硬件調試
重點介紹圖2中R5和R6這兩個電阻。剛開始設計的電路是沒有這兩個電阻的,但在做跟蹤太陽的試驗時,會出現抖動的現象,無法鎖定太陽。通過分析電路,決定在對準時制造一個窗口區間用來鎖定裝置,由于LM324的阻抗很大,小電阻產生不了壓降,慢慢加大這兩個電阻的阻值,經反復試驗后發現,這兩個電阻的阻值為5.1MΩ時效果最好。最后反復推敲得出結論:電機轉動速度過快,在對準太陽時,因為存在慣性無法立即停止,會繼續往前一點,這時電機又會往回糾正,如此反復,這就是出現顫抖的原因,增加這兩個5.1MΩ的電阻后,會產生0.2V的壓降,相當于制造了一個窗口,在這個窗口內,裝置不再檢測并執行電機的轉動,只有偏離這個窗口才會執行檢測,這樣就消除了抖動的現象。
本文設計的一種由光電探測器、控制電路、機械執行機構三部分組成的光電式太陽跟蹤器,該跟蹤器以LM324為核心,外圍電路簡單,性能穩定可靠,跟蹤精度高,功耗低。由于該太陽跟蹤器結構簡單,價格低廉,所以具有發展潛力。可實際應用于太陽能路燈等光電系統,現場試驗證明該系統具有可推廣性。














 工商網監
工商網監
用戶評論(0)