 電子發燒友App
電子發燒友App


基于pro/e的中小型排水管道清淤機器人虛擬樣機設計
?? 隨著國民經濟的迅速發展,環境污染日益嚴重,環保問題越來越受到社會各界的普遍關注。城市污水排放是確保環境衛生、建設現代化文明城市的重要一環。目前,我國絕大多數城市排水管道的清淤工作仍普遍處于人工作業的落后狀況,不僅體力繁重、效率低,而且井下工作環境惡劣,易于引發爆炸等事故傷害。文獻檢索的結果表明,國內外管道機器人多用于核反應堆管道和油氣輸送管道的檢測、補口等工作,而排水管道清淤機器人的研究尚屬空白。鑒于這種情況,我們進行了排水管道清淤機器人的研究,并在Pro/Engineer平臺上進行了清淤機器人虛擬樣機設計。?
一、排水管道清淤機器人設計方案?
排水管道清淤機器人本體采用四輪結構,輪子用耐磨、耐腐蝕的合成橡膠制成,并在其表面加設花紋以增大摩擦力。車輪與管道壁接觸處的形狀與管壁的弧形完全一致,以盡量做到無間隙接觸。車體前部裝有作業刀具,用于清理管道中的樹枝及鈣化物等淤積物。清理后的淤積物在水流的沖刷下被帶到下游管道檢查井。?
二、管道清淤機器人虛擬樣機設計?
虛擬樣機(Virtual Prototyping) 是當前設計制造領域的一門新興技術,該技術是在計算機上通過CAD/ CAM/ CAE等技術將產品信息集成到計算機提供的可視化虛擬環境,在實際產品制造之前實現產品的仿真、分析與優化過程。?
2.1 管道清淤機器人虛擬樣機的系統結構?
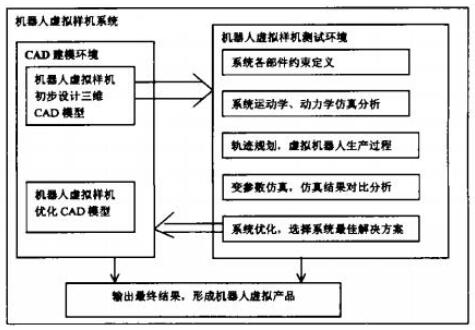
管道清淤機器人虛擬樣機將管道清淤機器人研究與虛擬樣機技術相結合, 針對機器人設計與制造過中的運動學與動力學分析、軌跡和路徑規劃、機器人與工作環境的相互作用等技術內容進行研究與系統開發,通過系統仿真軟件在相應虛擬環境中真實地模擬系統的運動,在計算機上方便地修改設計缺陷,仿真不同的設計方案,對系統進行不斷的改進,直至獲得最優的設計方案以后,再做出物理樣機。?
圖1 管道清淤機器人虛擬樣機系統結構圖
?
2.2 利用Pro/e實現管道清淤機器人虛擬樣機設計?
Pro/Engineer的主要功能是進行參數化的零件造型設計,所提供的功能包括實體造型設計、曲面設計、建立工程圖、零件組合、簡單的有限元素分析、模具設計、電路設計、裝配零件設計、加工制造、逆向工程等。?
本文以錐齒輪為例詳細介紹pro/e的參數化設計過程。設計步驟如下。?
1. 新建零件文件?
(1)新建零件文件:“bevelgear”。?
(2)取消選中【使用缺省模板】復選項,選用【mmns-part-solid】。?
2. 設置齒輪參數和關系式?
(1)打開【參數】對話框,按照如下表所示添加齒輪參數.?
名稱 類型 數值 說明?
M 實數 3 模數?
Z 實數 25 本齒輪齒數?
ZASM 實數 45 與之嚙合的齒輪齒數?
ALPHA 實數 20 壓力角?
B 實數 20 齒寬?
HAX 實數 1 齒頂高系數?
CX 實數 0.25 頂隙系數?
HA 實數 0 齒頂高?
HF 實數 0 齒根高?
H 實數 0 齒全高?
DELTA 實數 0 分錐角?
DELTA-A 實數 0 頂錐角?
DELTA-B 實數 0 基錐角?
DELTA-F 實數 0 根錐角?
D 實數 0 分度圓直徑?
DB 實數 0 基圓直徑?
DA 實數 0 齒頂圓直徑?
DF 實數 0 齒根圓直徑?
HB 實數 0 齒基高?
RX 實數 0 錐距?
THETA-A 實數 0 齒頂角?
THETA-B 實數 0 齒基角?
THETA-F 實數 0 齒根角?
BA 實數 0 齒頂寬?
BB 實數 0 齒基寬?
BF 實數 0 齒根寬?
X 實數 0 變位修正系數?
(2)打開【關系】對話框,按照如下所示添加直齒圓錐齒輪的關系式.通過這些關系式,根據已知參數確定未知參數的值。?
HA=(HAX+X) HF=(HAX+CX-X)H=(2*HAX+CX)*M DELTA=ATAN(Z/Z_ASM )D=m*Z DB=D*COS(ALPHA)DA=D+2*HA*COS(DELTA)DF=D-2*HF*COS(DELTA)HB=(D-DB)/(2*COS(DELTA))RX=D/(2*SIN(DELTA)THETA_A=ATAN(HA/RX)THETA_B=ATAN(HB/RX)THETA_F= ATAN(HB/RX)DELTA_A=DELTA+THETA_ADELTA_B=DELTA+THETA_BDELTA_F= DELTA+THETA_FBA=B/COS(THETA_A)BB=B/COS(THETA_B)BF=B/COS(THETA_F)?
(3)選擇主菜單中的【編輯】-【再生】選項,計算【參數】對話框中的各未知參數的值。?
3.創建錐齒幾何曲線?
(1)將基準平面TOP向右平移67.5后創建基準平面DTM1。?
(2)在工作區中單擊并選中基準平面DTM1與TOP面的平移距離,將其添加到【關系】對話框中,并輸入關系式:“=D/(2*TAN(DELTA))”。?
(3)創建通過基準平面FRONT和RIGHT交線的基準軸線A-1。?
(4)創建通過基準軸A-1和基準平面DTM1交點的基準點PNT0。?
(5)在右工具箱中單擊【草繪基準曲線】圖標,打開【草繪的基準曲線】對話框。選擇FRONT作為草繪平面,進入草繪模式。?
(6)將參數d2添加到【關系】對話框中,然后輸入關系式“=90”。用相同的方法繼續添加圖形中的其他參數。?
4. 創建大端齒輪基本圓?
(1)創建基準平面DTM2。選擇FRONT基準平面和曲線1作為參照創建基準平面。?
(2)創建基準點PNT1。創建經過曲線1和曲線2交點的基準點PNT1。?
(3)在右工具箱中單擊【草繪基準曲線】圖標,選取基準平面DTM2作為草繪平面,進入二維草繪模式。?
(4)在草繪平面內繪制任意尺寸的4個同心圓,并繪制一條過圓心的豎直線。?
(5)將基本圓的直徑參數添加到【關系】對話框中,按照如下所示添加關系式:?
D154=d/cos(delta) d155=da/cos(delta) d156=db/cos(delta) d157=df/cos(delta)?
其中,d154,d155,d156,d157分別代表分度圓、齒頂圓、基圓和齒根圓直徑。?
(6)選擇主菜單中的【編輯】-【再生】選項,再生齒輪基本圓尺寸,最后生成齒輪基本圓。?
5.創建小端齒輪基本圓?
(1)創建過曲線2和曲線3交點的基準點PNT2。?
(2)在右工具箱中單擊【草繪基準曲線】圖標,選取DTM3面作為草繪平面。然后在草繪平面內繪制任意尺寸的一個同心圓和一段過圓心的豎直線。?
(3)將各基本圓的直徑參數添加到關系對話框中,按照如下所示添加關系式:?
D158=(D-2*B*SIN(DELTA)/COS(DELTA) D159=(DA-2*BA*SIN(DELTA-A)/COS(DELTA) D160=(DB-2*BB*SIN(DELTA-B)/COS(DELTA) D161=(DF-2*BF*SIN(DELTA)/COS(DELTA)?
(4)選擇主菜單中的【編輯】-【再生】選項,再生個齒輪基本圓尺寸,最后生成標準齒輪基本圓。?
6. 創建大端齒輪漸開線?
(1)創建坐標系CS0。?
在右工具箱單擊【草繪基準曲線】按鈕,打開坐標系對話框,選擇基準點PNT1作為坐標系的放置參照。在【坐標系】對話框中打開【定向】選項卡,選擇曲線4作為Y軸的正向,選擇曲線5作為X軸的正向,生成坐標系CS0。?
(2)創建坐標系CS1。??
再次打開【坐標系】對話框,選擇坐標系CS0作為新建坐標系的放置參照,在【偏移類型】中選擇【笛卡兒坐標系】,最后生成坐標系CS1。?
(3)將坐標系CS0與CS1的偏移角度參數添加到【關系】對話框中,然后輸入關系式:“=360*COS(DELTA)/(4*Z)+180*TAN(ALPHA)/OI-ALPHA”。?
(4)打開記事本編輯器,在其中添加漸開線方程式如下:?
R=d156/2 theta=t*60 x=r*cos(theta)+r*sin(theta)*theta*pi/180 y=r*sin(theta)-r*cos(theta)*theta*pi/180 z=0?
完成后依次選取【文件】-【保存】選項保存設置,最后創建齒輪漸開線。?
7. 創建小端齒輪漸開線?
(1)創建坐標系CS2。?
選擇PNT2作為坐標系的放置參照,選擇曲線6作為Y軸的正向,選擇曲線7作為X軸的正向,最后創建坐標系CS2。?
(2)創建坐標系CS3。選擇CS2作為放置參照,最后生成坐標系CS3。?
(3)選擇坐標系CS3與CS2的偏移角度參數,并將其添加到【關系】對話框中,然后輸入關系式:“=360*COS(DELTA)/94*Z)+180*TAN(ALPHA)/PI-ALPHA”.?
(4)打開【曲線:從方程】對話框,選擇坐標系CS3和【笛卡兒】選項。在打開的記事本中添加如下關系式:?
R=d160/2 theta=t*60 x=r*cos(theta)+r*sin(theta)*theta*pi/180 y=r*sin(theta)-r*cos(theta)*theta*pi/180 z=0?
完成后依次選取【文件】-【保存】選項保存設置。最后生成漸開線。?
8. 鏡像漸開線?
(1)創建過曲線8和曲線9的交點的基準點PNT3。?
(2)創建通過基準點PNT1,且垂直與基準平面DTM2的基準軸A-2。?
(3)創建通過基準軸A-2和基準點PNT3的基準平面DTM4。?
(4)創建與DTM4的偏移角度為-3且通過A-2的基準平面DTM5。?
(5)將基準平面DTM4與DRM5的夾角參數添加到【關系】對話框中,然后輸入關系式:“=360*COS(DELTA)/(4*Z)”。?
(6)選擇DTM5作為鏡像平面鏡像齒輪大端漸開線。?
(7)使用同樣的方法鏡像小端漸開線。?
9. 創建第一個輪齒?
(1)在主菜單中選擇【插入】-【掃描混合】-【伸出項】選項,打開【菜單管理器】,在【混合選項】菜單中選取【草繪截面】、【垂直于原始軌跡】和【完成】選項。在【掃描軌跡】菜單中選擇【草繪軌跡】選項。選取基準平面FRONT作為草繪平面,然后使用缺省參數放置草繪平面。?
(2)在右工具箱中單擊【使用邊】按鈕,打開【類型】對話框,選擇其中的【單個】單選按鈕,使用修剪按鈕結合繪圖工具繪制掃描軌跡線。?
(3)根據系統提示,在消息輸入窗口中輸入z-axis旋轉角度:“0”。?
(4)在右工具箱中單擊【使用邊】按鈕,打開【類型】對話框,選擇其中的【單個】單選按鈕,使用修剪和倒圓角按鈕并結合繪圖工具繪制齒輪的大端齒廓線。(注意在兩個圓角處添加等半徑約束)。?
(5)根據系統提示,在消息輸入窗口中輸入z-axis旋轉角度:“0”。?
(6)使用類似的方法繪制小端齒廓線,最后生成輪齒結構。?
(7)打開關系對話框,在對話框中添加以下關系式:?
If hax<1 d207=0.31*m d217=0.31*m endif if hax>=1 d207=0.2*m d217=0.2*m endif?
其中,d207和d217分別是齒輪大小端的齒廓曲線的倒角。?
10. 復制和陣列輪齒?
(1)使用旋轉復制的方法復制前一步驟創建的輪齒,旋轉角度為“360/z”,最后生成第二個輪齒。?
(2)使用陣列方法陣列輪齒,陣列特征總數為24。?
(3)將旋轉復制輪齒時的旋轉角度參數添加倒【關系】對話框中,然后輸入關系式:“=360/z”。?
(4)將第一個齒到第三個齒的距離參數添加到【關系】對話框中,然后輸入關系式:“=z-1“。?
11. 創建錐體?
(1)在右工具箱中單擊【旋轉】按鈕,打開設計圖標板。選擇基準平面FRONT作為草繪平面,接受系統缺省參數放置草繪平面,進入二維草繪模式。?
(2)使用基本繪圖工具繪制錐體的二維圖形。最后生成錐齒結構。?
(3)將錐齒大端長度參數添加到【關系】對話框中,然后輸入關系式:“=0.8*h”。?
12. 添加裝飾結構?
13. 改變齒輪參數?
在主菜單中選擇【工具】-【參數】選項,打開【參數】對話框。修改齒數為39,模數為2.5,齒寬為15。?
修改后在主菜單中選擇【編輯】-【再生】選項,按照修改后的參數再生模型。最后生成模型如圖2所示。?
圖2 圓錐齒輪
?
三、結論?
利用虛擬樣機技術實現中小型排水管道清淤機器人設計,可以在有條件制作物理樣機之前對機器人的運動性能、機器人的可裝配性、可制造性進行科學評價,從而優化了設計,壓縮甚至取消了物理樣機的試制過程,縮短了機器人開發周期,節省了設計費用,也為今后機器人的產業化提供了技術保障。




















 工商網監
工商網監
評論