 電子發燒友App
電子發燒友App


基于PLC的多層升降橫移立體停車庫控制設計
引言
隨著汽車的急增致使城市停車難問題不斷惡化,而作為解決城市靜態交通的有效措施——向空間、向高層發展的自動化立體停車設備,以其占地面積少、停車率高、布置靈活、高效低耗、性價比高、安全可靠等優點,越來越受到人們的青睞。目前市面上常見的機械式立體停車庫有:升降橫移類、垂直循環類、多層循環類、水平循環類、平面移動類、巷道堆垛類、垂直升降類和簡易升降類等8種,其中升降橫移類以其結構簡單、操作方便、安全可靠、造價低等優點,在國內車庫市場占有絕對優勢的市場份額。
升降橫移立體車庫運行原理
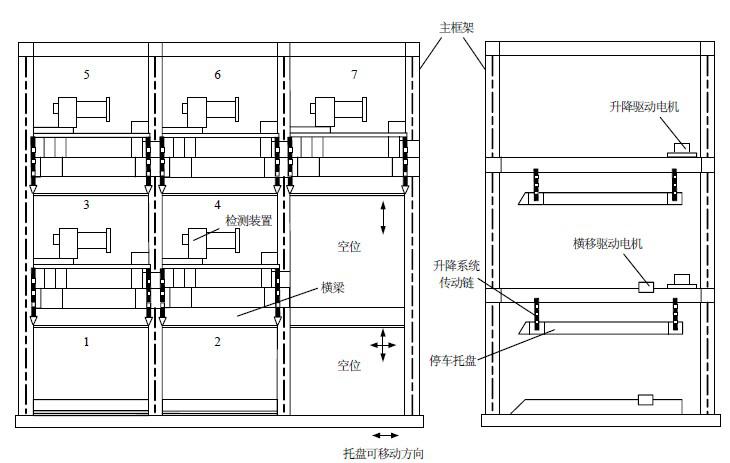
升降橫移類機械停車庫利用托盤移位產生垂直通道,實現高層車位升降存取車輛。其車位結構為2維矩陣形式,可設計為多層和多列。由于受收鏈裝置及進出車時間的限制,一般為2~4層(國家規定最高為4層),2層、3層者居多,現以典型的地上3×3升降橫移式為例,說明停車庫的運行原理。
立體車庫結構特點是:底層只能平移,頂層只能升降,中間層既可平移又可升降。除頂層外,中間層和底層都必須預留一個空車位,供進出車升降之用。當底層車位進出車時,無需移動其他托盤就可直接進出車;中間層、頂層進出車時,先要判斷其對應的下方位置是否為空,不為空時要進行相應的平移處理,直到下方為空才可進行下降動作,進出車完成后再上升回到原位置。其運動的總原則是:升降復位,平移不復位。
控制系統方案的確定
升降橫移立體停車庫以停放轎車為主,其代價較昂貴,而且立體停車庫使用時涉及到人身和車輛的安全,所以對設備的安全性和可靠性要求非常高。PLC采用了以計算機為核心的通用自動控制裝置,集微機技術、自動化技術、通訊技術為一體,可靠性強、性價比高、設計緊湊、擴展性好、操作方便,適用于頻繁啟動和惡劣的環境,因此在立體停車庫控制系統中通常采用PLC作為電控系統的核心。
作為網絡底層的現場總線技術以其簡單的結構,在控制系統的設計、安裝、運行、維護上體現出極大的優越性,因此本文采用Profibus-FMS和Profibus-DP構成兩層控制網絡。Profibus-FMS主要完成中等傳輸速度的循環和非循環通信任務,通常用于PLC與PC、PLC與PLC之間的互相通信。而底層網絡則選擇了Profibus-DP,這主要因為Profibus-DP是經過優化的高速通信聯接,用于設備級分散I/O之間的通信,構成獲得最短總體循環時間的單主站系統。本系統運用現場總線技術實現了現場智能設備和自動化控制設備之間的開放式、數字化、多節點通信,并提高了系統工作的可靠性和靈活性。
同時,本系統以上位機作為監控機,利用上位機的數據通信手段,數據處理能力和圖形顯示、多媒體技術,通過現場總線,實時接收和處理下位機PLC從現場采集的各種狀態、控制、報警信號,并利用這些信號驅動PC控制界面中的各種圖形,實時顯示現場的各種狀況,在操作員和停車庫之間構造出形象、直觀的界面,對操作運行和故障給出提示、報警等。
立體車庫控制系統設計
控制系統的組成
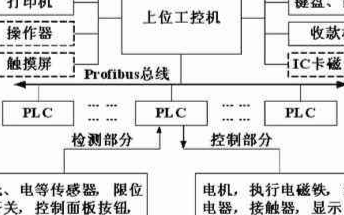
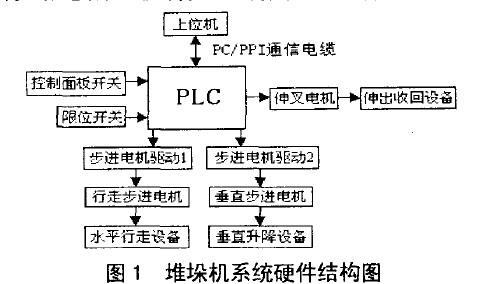
立體車庫控制系統由上位機監控系統和下位機PLC控制系統組成,圖1為該系統結構框圖。其中,監控系統由“上位機+Profibus現場總線+PLC+現場操作機構”構成,以PC機為核心,配備有打印機、音效設備、收款機、顯示器等。如果車庫是由多個3×3單元的組合,可以用一個PLC控制一個車庫單元,多個PLC共同構成多點結構的局域網。如果車庫的規模足夠大,還可以考慮配備操作器、觸摸屏和IC卡磁卡機等來實現智能化自動控制。

圖1 控制系統結構圖
車庫控制方式分為3級——手動、半自動和全自動。手動是在現場用手操作器對每個托板進行點動控制,應用于車庫檢修、突然停電、緊急停機和車庫故障4種情況;半自動為操作PLC控制面板上的按鈕由PLC實現自動邏輯控制;全自動是由計算機給出存取命令由PLC來執行任務(要求配備“操作器”)。其中,手動方式為最高優先級,而半自動或全自動方式用于正常進出車處理,其中半自動方式優先級高于全自動。在計算機脫機情況下,PLC控制面板可以完成所有存取車操作,而且本設計要求手動、半自動、全自動之間必須能夠互鎖。
PLC控制系統設計
PLC是車庫控制系統的核心,其操作大致分為三類:以故障診斷和處理為主的操作;聯系現場狀況的數據I/O操作;執行用戶程序以及響應與PLC相連的外部設備的命令操作。當有存取操作時,PLC會接收和分析操作人員在控制面板按鈕或上位機輸入的指令,做出合理的工控安排:判斷檢測元件的狀態,讀取車庫機械驅動部分的信息;然后,將信息反饋到執行元件,拖動車位板,實現其位置移動,完成車輛的存取操作和信號的顯示(指示燈)。整個動作區域配有光電檢測及多重安全系統,以防異常情況發生。
該系統中PLC主要完成對托盤、托板位置及運行狀態的檢測和存取車的操作。用各種光電開關、行程開關檢測位置狀態,用接觸器、繼電器執行對拖動電機的起停控制。
?
對車位的操作就是控制橫移小電機和升降大電機,使它們在不同時間實現正反轉。而且上層升降動作和以下各層的橫移動作必須是互鎖的,即當上層泊位在升降時,下面各層泊位不能移動,反之亦然。并且上層泊位每次只能有一個泊位進行上下升降運動。
為了保證存取車可靠安全,系統要精確定位。行程開關的設置保證了托板能平移到預定位置以及托盤能上升或下降到準確位置,但同時,行程開關邏輯要嚴格互鎖。例如1、2水平限位開關在靜態情況下只能有一個是斷開的,如果2個以上開關閉合即表示托板不到位。在車庫靜止時, 2、3層所有掛鉤信號均應斷開(負邏輯),2層上限位開關斷開,3層上限位開關閉合。
此外,為了保證載車板運行過程的安全性,必須采取傳動系統自鎖保險設計和安全掛鉤保險設計:如鏈傳動采用制動電機,無論發生什么情況,都處于自我保護狀態;控制安全掛鉤運動的電磁鐵上必須有一反饋信號,以指示掛鉤是否已把托盤掛好等。
光電開關布置在不同的位置有不同的功能:分別安裝在托盤底層左右兩邊的光電開關,可以檢測托盤上汽車停放是否到位;在托盤對角線上安放的光電開關可以檢測托盤上有無車;裝設于停車庫車輛入口處左右兩側的光電開關還可以用于檢測外界的錯誤動作和車位移動時出現的異常情況等,如車輛未停妥、動作區域有人或物、運行過程中有車想開進等意外情況,光電開關光線被遮,會給PLC一個電平變化信號,從而改變PLC的輸入,蜂鳴器發音報警,設備不作運行或停止運行。
同時在車庫中還運用了一些傳感器,如煙溫傳感器、檢測斷繩松繩或斷鏈報警的位移傳感器,以及警示裝置、緊急停車開關、手動按鈕、復位開關等。
PLC控制系統程序設計
控制程序流程圖
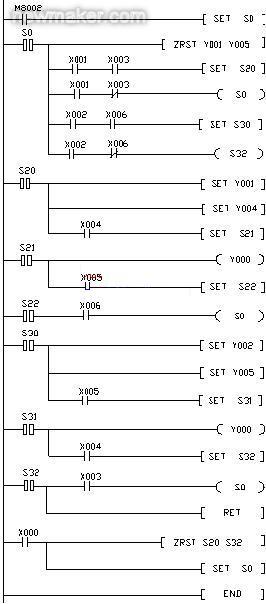
該系統存取車控制只針對上層(二、三、四層)車位,而對于下層車位,存取車只需直接開進開出即可。控制軟件采用梯形圖語言編寫。程序流程圖如圖2所示。

圖2 上層控制程序流程圖
軟件在設計不同層進出車程序時運用了“并行分支與匯合”的技巧,所謂并行分支指的是各分支流程可同時執行,待各流程動作全部結束后,根據相應執行條件,匯合狀態動作。即如果選擇第三層托盤進出車,可以使一層二層同時平移(左移或右移),這樣,設備動作順序之間聯鎖或雙重輸出時,控制系統均能自動處理,而且控制系統的試運行及故障檢查非常方便,可節約大量時間,提高工作效率。
控制程序優化
由于上層的托盤升降都必須使其下層車位為空車位之后才能進行,以地上三層車位運動為例,一層空車位位置有N種,二層托盤升降涉及的運動方式有N2種,三層托盤可能的運動方式有N3種,隨著車位和層數的增加,程序會出現劇烈膨脹,因此,如何尋求簡便方法,使程序得到優化將是該系統程序設計的難點。以第二層為例,在變量Dm中存放第二層需要存取的車位號,該車位號為1~N,如進行上層X(1≤X≤N)號車位存取,則Dm=X;在Dn中存放下層空車位號,設空車位為Y號車位,則Dn=Y;在進行存取車時,把Dm和Dn中的數值進行比較,其結果為零,則上層車位的托盤可以直接下移;如果結果大于零,則表示空車位在左邊,這樣先把空車位右邊第一個托盤左移到空位上,之后重復上述過程,直到空車位在上層需要存取的車位正下方時,上層車位的托盤才能進行升降運動。三層和四層存取車的處理方法和第二層類似。
模塊化程序設計
PLC控制程序采用模塊化編程形式,車位運行過程中只需調用子程序模塊,這樣大大降低了程序的復雜程度,方便了程序的修改,而且為車位的拓展提供了便利的條件。整個程序包括主程序模塊、手動按鍵子程序模塊、緊急停車按鍵子程序模塊、初始化程序模塊、存取車位號賦值程序模塊、空車位號與移動車位號賦值程序模塊、托盤平移運動程序模塊、光電開關子程序模塊、托盤升降運動程序模塊和故障報警子程序模塊。
軟件設計中關鍵問題的處理
程序所用狀態元件、定時器及數據存儲器均選用具有掉電保護功能的元件,當系統掉電時元件保持掉電前的狀態,以保存現場信息,待上電后繼續完成被中斷的動作;當發生意外情況時,按下急停按鈕中止系統的運行并保存現場斷點信息;當出現如電機過載、過熱電氣或機械故障時,自動中止系統的運行,并發出聲光報警,同時系統轉入手動方式進行故障處理。
結語
升降橫移類立體車庫的控制系統通過采用PLC和Profibus現場總線控制,使整個控制系統的可靠性大大提高,滿足了車庫的控制功能與使用性能的要求,完全實現了進出車的智能控制。系統還在硬件設計上采用了手動、半自動和全自動多級冗余控制方式,配合軟件/硬件連鎖保護,大大提高了系統的可靠性;同時,由于PLC軟件設計上的優化處理,使得本系統對于車位的擴展實現較為簡便;此外,軟件設計還采用了“并行分支與匯合”的技巧,從而大大縮短了進出車時間,提高了工作效率。
?














 工商網監
工商網監
評論