 電子發燒友App
電子發燒友App


ESP(Electronic Stability Program,電子穩定程序)是汽車電控的一個標志性發明。不同的研發機構對這一系統的命名不盡相同。?
?????? 圖1所示為汽車ESP的構成示意圖,其電子部件主要包括電子控制單元(ECU)、方向盤傳感器、縱向加速度傳感器、橫向加速度傳感器、橫擺角速度傳感器、輪速傳感器等。ESP作為保證行車安全的一個重要電控系統,其各個傳感器的正常工作是進行有效控制的基礎。本文介紹了ESP常用傳感器的特點,設計了傳感器硬件接口和軟件接口,并在實車測試中得到驗證。??
????????
???????????????????????????????????????????????????????????圖1 ESP的構成示意圖
ESP常用傳感器介紹
如圖1、圖2所示,ESP常用的傳感器如下。
? ?? ?? ?? ?
? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ? 圖2 ESP常用傳感器
方向盤轉角傳感器
ESP通過計算方向盤轉角的大小和轉角變化速率來識別駕駛員的操作意圖。方向盤轉角傳感器將方向盤轉角轉換為一個可以代表駕駛員期望的行駛方向的信號,方向盤轉角一般是根據光電編碼來確定的,安裝在轉向柱上的編碼盤上包含了經過編碼的轉動方向、轉角等信息。這一編碼盤上的信息由接近式光電耦合器進行掃描。接通點火開關并且方向盤轉角傳感器轉過一定角度后,處理器可以通過脈沖序列來確定當前的方向盤絕對轉角。方向盤轉角傳感器與ECU的通訊一般通過CAN總線完成。
橫擺角速度傳感器
橫擺角速度傳感器檢測汽車沿垂直軸的偏轉,該偏轉的大小代表汽車的穩定程度。如果偏轉角速度達到一個閾值,說明汽車發生測滑或者甩尾的危險工況,則觸發ESP控制。當車繞垂直方向軸線偏轉時,傳感器內的微音叉的振動平面發生變化,通過輸出信號的變化計算橫擺角速度。
縱向/橫向加速度傳感器
ESP中的加速度傳感器有沿汽車前進方向的縱向加速度傳感器和垂直于前進方向的橫向加速度傳感器,基本原理相同,只是成90°夾角安裝。ESP一般使用微機械式加速度傳感器,在傳感器內部,一小片致密物質連接在一個可以移動的懸臂上,可以反映出汽車的縱向/橫向加速度的大小,其輸出在靜態時為2.5V左右,正的加速度對應正的電壓變化,負的加速度對應負的電壓變化,每1.0-1.4V對應1g的加速度變化,具體參數因傳感器不同而有所不同。
輪速傳感器
? ?? ? 在汽車上檢測輪速信號時,最常用的傳感器是電磁感應式傳感器,一般做法是將傳感器安裝在車輪總成的非旋轉部分(如轉向節或軸頭)上,與隨車輪一起轉動的導磁材料制成的齒圈相對。當齒圈相對傳感器轉動時,由于磁阻的變化,在傳感器上激勵出交變電壓信號,這種交變電壓的頻率與車輪轉速成正比, ECU采用專門的信號處理電路將傳感器信號轉換為同頻率的方波,再通過測量方波的頻率或周期來計算車輪轉速。
最初的ESP系統中縱向/橫向加速度傳感器和橫擺角速度傳感器都是單獨實現的,現在基本都使用了傳感器總成(Sensor Cluster)的模式,將這3個傳感器設計為一體,通過CAN總線與ECU通訊。如圖3為SIMENS VDO公司和BEI公司生產的傳感器總成。
? ?? ?? ???
? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ???圖3 傳感器總成(Sensor Cluster)
博世公司為了增加新的ESP功能和為了更好的控制整車的穩定性系統,如山地保持控制(HHC)和線控(SbW),提出了模塊化的HW和SW概念,開發了第三代高度靈活和低成本的慢性傳感器總成DRS MM3.x。
ESP常用傳感器接口設計
本文所作設計的框圖如圖4所示。在圖中,方向盤轉角傳感器信號經微控制器處理后,通過CAN總線發送給ECU(圖4中B);橫擺角速度傳感器、縱向/橫向傳感器由于信號特點和安裝位置類似,故設計在同一個模塊內(圖4中A);由于ESP對輪速傳感器信號的實時性要求較高,故經過信號調理后,直接送入ECU(圖4中C)。在圖4的A和B中,需要微處理器對信號進行處理并通過CAN總線傳送數據,本文選用Infineon公司的SAK-C164CI。該芯片是專為汽車應用而設計,內置AD轉換器、輸入信號捕捉、正交解碼器,運算速度快,非常適合ESP的傳感器信號處理。
? ?? ?? ?? ?? ?
? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?圖4 傳感器連接框圖
方向盤轉角傳感器接口
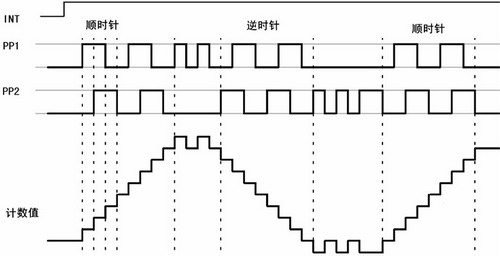
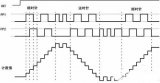
方向盤轉角傳感器的輸出為正交編碼脈沖。正交編碼脈沖包含兩個脈沖序列,有變化的頻率和四分之一周期(90°)的固定相位偏移,如圖5所示。通過檢測2路信號的相位關系可以判斷為順時針方向和逆時針方向,并據此對信號進行加/減計數,從而得到當前的計數累計值,也即方向盤的絕對轉角,而轉角的變化率即角速度,則可通過信號頻率測出。另外,方向盤轉角傳感器有一個零位輸出信號,當方向盤在中間位置時,該信號輸出0V,否則輸出5V,通過該信號,可對絕對轉角進行在線校準。
? ?? ?? ?
? ?? ?? ?? ?? ?圖5 方向盤轉角傳感器脈沖序列波形
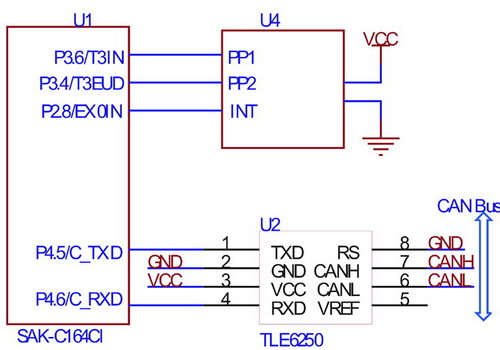
C164CI與方向盤轉角傳感器的接口電路如圖6所示。片內內置增量編碼的正交解碼器,該解碼器使用定時器3的兩個引腳(T3IN、T3EUD)作為正交脈沖的輸入,在正確設置相關寄存器后,定時器3的數據寄存器的值與方向盤轉角成正比,故可方便的計算轉角,本文所使用的方向盤轉角傳感器每一圈對應44個脈沖,設定時器3的數據寄存器為T3,則絕對轉角為.
? ?? ?? ???
? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?圖6 方向盤轉角傳感器接口電路
對(1)式進行差分運算,即可得到轉角變化速率。微控制器把計算得到的參數通過CAN發送給ECU。
輪速傳感器接口
根據前面部分介紹的輪速傳感器信號特點,設計接口電路如圖7所示。
? ?? ?? ?
? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ???圖7 輪速傳感器接口電路
電路采用兩級濾波和整形,以保證輪速信號在極低轉速下不會丟失,同時避免因懸架振動引起的信號干擾。圖中由電阻R2引入第一級遲滯比較,而使用74HC14引入第二級遲滯比較。
橫擺角速度、縱向/橫向加速度傳感器
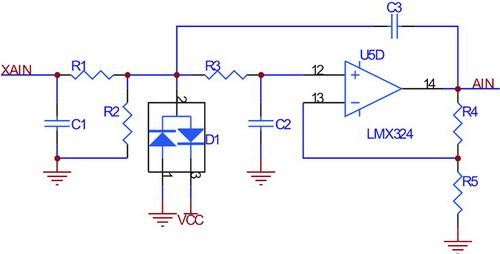
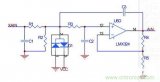
橫擺角速度、縱向/橫向加速度傳感器的安裝位置基本相同,輸出都是0V-5V的模擬量,由于汽車顛簸造成的信號波動特性一致,故封裝在同一模塊中。其硬件接口如圖8所示,實現硬件模擬前置濾波,以抑制來自傳感器的模擬信號中的高頻噪聲成分,防止在采樣過程中出現混疊現象。運放使用滿擺幅輸出的LMX324。
調整圖8中各個阻容元件的參數,即可設置濾波截止頻率和延時大小。汽車運行過程中,在較好路面上行駛時,由于信號較好,延時盡量要小,而在顛簸路面上行駛,則希望濾波效果要好。但是由于硬件濾波的頻率特性一經設計完畢,無法實時修改,故需要在軟件中設計數字濾波環節。數字濾波常用的有維納濾波器、卡爾曼濾波器、線性預測器、自適用濾波器等。在這里選用計算量小、實時性能好的一階低通濾波,傳遞函數為.
? ???
? ?? ?? ?? ?? ?? ?? ?? ?圖8 橫擺角速度、縱向/橫向加速度傳感器接口電路
k的選擇取決于當前的路面情況,而當前路面情況,則通過數字濾波前的原始信號來識別。微控制器把濾波后的信號、原始信號、k的值、路面識別結果打包后,通過CAN總線發送給ECU。圖9a和9b分別為顛簸路面實車試驗中采集得到的縱向加速度傳感器的一組對比曲線。
? ?? ?? ???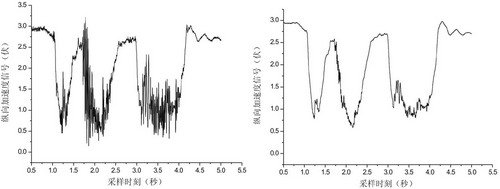
? ?? ?? ?? ?? ?? ?? ?? ???圖9a 數字濾波前的數據曲線 圖9b 數字濾波后的曲線
結語
本文討論了ESP系統中常用傳感器的結構特點及信號特性,并設計了各個傳感器的信號處理接口,其中包括硬件接口電路以及軟件處理方案。設計了包含橫擺角速度、縱向/橫向加速度傳感器的集成模塊,通過CAN總線與ECU進行數據傳輸,具有較好的抗干擾性和可靠性。本文的設計已經在實車試驗中得到驗證。
?????? 圖1所示為汽車ESP的構成示意圖,其電子部件主要包括電子控制單元(ECU)、方向盤傳感器、縱向加速度傳感器、橫向加速度傳感器、橫擺角速度傳感器、輪速傳感器等。ESP作為保證行車安全的一個重要電控系統,其各個傳感器的正常工作是進行有效控制的基礎。本文介紹了ESP常用傳感器的特點,設計了傳感器硬件接口和軟件接口,并在實車測試中得到驗證。??
????????
???????????????????????????????????????????????????????????圖1 ESP的構成示意圖
ESP常用傳感器介紹
如圖1、圖2所示,ESP常用的傳感器如下。
? ?? ?? ?? ?
? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ? 圖2 ESP常用傳感器
方向盤轉角傳感器
ESP通過計算方向盤轉角的大小和轉角變化速率來識別駕駛員的操作意圖。方向盤轉角傳感器將方向盤轉角轉換為一個可以代表駕駛員期望的行駛方向的信號,方向盤轉角一般是根據光電編碼來確定的,安裝在轉向柱上的編碼盤上包含了經過編碼的轉動方向、轉角等信息。這一編碼盤上的信息由接近式光電耦合器進行掃描。接通點火開關并且方向盤轉角傳感器轉過一定角度后,處理器可以通過脈沖序列來確定當前的方向盤絕對轉角。方向盤轉角傳感器與ECU的通訊一般通過CAN總線完成。
橫擺角速度傳感器
橫擺角速度傳感器檢測汽車沿垂直軸的偏轉,該偏轉的大小代表汽車的穩定程度。如果偏轉角速度達到一個閾值,說明汽車發生測滑或者甩尾的危險工況,則觸發ESP控制。當車繞垂直方向軸線偏轉時,傳感器內的微音叉的振動平面發生變化,通過輸出信號的變化計算橫擺角速度。
縱向/橫向加速度傳感器
ESP中的加速度傳感器有沿汽車前進方向的縱向加速度傳感器和垂直于前進方向的橫向加速度傳感器,基本原理相同,只是成90°夾角安裝。ESP一般使用微機械式加速度傳感器,在傳感器內部,一小片致密物質連接在一個可以移動的懸臂上,可以反映出汽車的縱向/橫向加速度的大小,其輸出在靜態時為2.5V左右,正的加速度對應正的電壓變化,負的加速度對應負的電壓變化,每1.0-1.4V對應1g的加速度變化,具體參數因傳感器不同而有所不同。
輪速傳感器
? ?? ? 在汽車上檢測輪速信號時,最常用的傳感器是電磁感應式傳感器,一般做法是將傳感器安裝在車輪總成的非旋轉部分(如轉向節或軸頭)上,與隨車輪一起轉動的導磁材料制成的齒圈相對。當齒圈相對傳感器轉動時,由于磁阻的變化,在傳感器上激勵出交變電壓信號,這種交變電壓的頻率與車輪轉速成正比, ECU采用專門的信號處理電路將傳感器信號轉換為同頻率的方波,再通過測量方波的頻率或周期來計算車輪轉速。
最初的ESP系統中縱向/橫向加速度傳感器和橫擺角速度傳感器都是單獨實現的,現在基本都使用了傳感器總成(Sensor Cluster)的模式,將這3個傳感器設計為一體,通過CAN總線與ECU通訊。如圖3為SIMENS VDO公司和BEI公司生產的傳感器總成。
? ?? ?? ???
? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ???圖3 傳感器總成(Sensor Cluster)
博世公司為了增加新的ESP功能和為了更好的控制整車的穩定性系統,如山地保持控制(HHC)和線控(SbW),提出了模塊化的HW和SW概念,開發了第三代高度靈活和低成本的慢性傳感器總成DRS MM3.x。
ESP常用傳感器接口設計
本文所作設計的框圖如圖4所示。在圖中,方向盤轉角傳感器信號經微控制器處理后,通過CAN總線發送給ECU(圖4中B);橫擺角速度傳感器、縱向/橫向傳感器由于信號特點和安裝位置類似,故設計在同一個模塊內(圖4中A);由于ESP對輪速傳感器信號的實時性要求較高,故經過信號調理后,直接送入ECU(圖4中C)。在圖4的A和B中,需要微處理器對信號進行處理并通過CAN總線傳送數據,本文選用Infineon公司的SAK-C164CI。該芯片是專為汽車應用而設計,內置AD轉換器、輸入信號捕捉、正交解碼器,運算速度快,非常適合ESP的傳感器信號處理。
? ?? ?? ?? ?? ?
? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?圖4 傳感器連接框圖
方向盤轉角傳感器接口
方向盤轉角傳感器的輸出為正交編碼脈沖。正交編碼脈沖包含兩個脈沖序列,有變化的頻率和四分之一周期(90°)的固定相位偏移,如圖5所示。通過檢測2路信號的相位關系可以判斷為順時針方向和逆時針方向,并據此對信號進行加/減計數,從而得到當前的計數累計值,也即方向盤的絕對轉角,而轉角的變化率即角速度,則可通過信號頻率測出。另外,方向盤轉角傳感器有一個零位輸出信號,當方向盤在中間位置時,該信號輸出0V,否則輸出5V,通過該信號,可對絕對轉角進行在線校準。
? ?? ?? ?
? ?? ?? ?? ?? ?圖5 方向盤轉角傳感器脈沖序列波形
C164CI與方向盤轉角傳感器的接口電路如圖6所示。片內內置增量編碼的正交解碼器,該解碼器使用定時器3的兩個引腳(T3IN、T3EUD)作為正交脈沖的輸入,在正確設置相關寄存器后,定時器3的數據寄存器的值與方向盤轉角成正比,故可方便的計算轉角,本文所使用的方向盤轉角傳感器每一圈對應44個脈沖,設定時器3的數據寄存器為T3,則絕對轉角為.
? ?? ?? ???
? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?圖6 方向盤轉角傳感器接口電路
對(1)式進行差分運算,即可得到轉角變化速率。微控制器把計算得到的參數通過CAN發送給ECU。
輪速傳感器接口
根據前面部分介紹的輪速傳感器信號特點,設計接口電路如圖7所示。
? ?? ?? ?
? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ???圖7 輪速傳感器接口電路
電路采用兩級濾波和整形,以保證輪速信號在極低轉速下不會丟失,同時避免因懸架振動引起的信號干擾。圖中由電阻R2引入第一級遲滯比較,而使用74HC14引入第二級遲滯比較。
橫擺角速度、縱向/橫向加速度傳感器
橫擺角速度、縱向/橫向加速度傳感器的安裝位置基本相同,輸出都是0V-5V的模擬量,由于汽車顛簸造成的信號波動特性一致,故封裝在同一模塊中。其硬件接口如圖8所示,實現硬件模擬前置濾波,以抑制來自傳感器的模擬信號中的高頻噪聲成分,防止在采樣過程中出現混疊現象。運放使用滿擺幅輸出的LMX324。
調整圖8中各個阻容元件的參數,即可設置濾波截止頻率和延時大小。汽車運行過程中,在較好路面上行駛時,由于信號較好,延時盡量要小,而在顛簸路面上行駛,則希望濾波效果要好。但是由于硬件濾波的頻率特性一經設計完畢,無法實時修改,故需要在軟件中設計數字濾波環節。數字濾波常用的有維納濾波器、卡爾曼濾波器、線性預測器、自適用濾波器等。在這里選用計算量小、實時性能好的一階低通濾波,傳遞函數為.
? ???
? ?? ?? ?? ?? ?? ?? ?? ?圖8 橫擺角速度、縱向/橫向加速度傳感器接口電路
k的選擇取決于當前的路面情況,而當前路面情況,則通過數字濾波前的原始信號來識別。微控制器把濾波后的信號、原始信號、k的值、路面識別結果打包后,通過CAN總線發送給ECU。圖9a和9b分別為顛簸路面實車試驗中采集得到的縱向加速度傳感器的一組對比曲線。
? ?? ?? ???
? ?? ?? ?? ?? ?? ?? ?? ???圖9a 數字濾波前的數據曲線 圖9b 數字濾波后的曲線
結語
本文討論了ESP系統中常用傳感器的結構特點及信號特性,并設計了各個傳感器的信號處理接口,其中包括硬件接口電路以及軟件處理方案。設計了包含橫擺角速度、縱向/橫向加速度傳感器的集成模塊,通過CAN總線與ECU進行數據傳輸,具有較好的抗干擾性和可靠性。本文的設計已經在實車試驗中得到驗證。










 工商網監
工商網監
評論