 電子發(fā)燒友App
電子發(fā)燒友App


簡介
像傾斜傳感器ADIS16209這樣的傳感器系統(tǒng)具有集成度高、規(guī)格全面的特點(diǎn),采用緊湊型封裝,并且價(jià)格合理,使系統(tǒng)開發(fā)人員能夠輕松運(yùn)用自己可能并不熟悉的傳感器技術(shù),從而將成本和風(fēng)險(xiǎn)降至最低。由于精度是完全按給定的功率電平確定,因而似乎會(huì)約束開發(fā)人員降低功耗的能力。但是,對(duì)于必須嚴(yán)格管理能量使用的應(yīng)用,采用周期供電的方式為降低平均功耗提供了突破口。本文將重點(diǎn)討論周期供電及其對(duì)總體功耗的影響。
我們中許多人都是在溫馨的家庭環(huán)境中長大的,但父母總會(huì)沖我們大喊:“離開房間時(shí)把燈關(guān)上!我們家不是開電廠的!”實(shí)際上,他們是在教會(huì)我們一項(xiàng)重要的能源管理方法——周期供電,一種在不需要某項(xiàng)功能時(shí)關(guān)閉其電源的過程,例如在不需要進(jìn)行測量時(shí)關(guān)閉傳感器系統(tǒng)。這樣做能夠降低平均功耗,計(jì)算公式如下:

PON是系統(tǒng)處于正常工作狀態(tài)時(shí)的功耗。POFF是系統(tǒng)處于關(guān)閉狀態(tài)時(shí)的功耗。它與殘留電流相關(guān),如電源調(diào)節(jié)器要維持功率開關(guān)或關(guān)斷模式所需的電流,其典型值在1μA左右。開啟時(shí)間(TON)是傳感器系統(tǒng)開啟、進(jìn)行所需測量并重新關(guān)閉所需的時(shí)間量。關(guān)閉時(shí)間(TOFF)取決于系統(tǒng)需要進(jìn)行傳感器測量的頻繁程度。如果關(guān)閉功率遠(yuǎn)遠(yuǎn)小于開啟功率,則平均功耗實(shí)際上與占空比成正比。例如,如果關(guān)閉功率為零且占空比為 10%,則平均功耗為正常工作功耗的 10%。
傳感器系統(tǒng)綜述
傳感器可將溫度、加速度或應(yīng)力等物理量轉(zhuǎn)變成電信號(hào)。為了合理使用這些電信號(hào),傳感器元件需要一些支持功能,如激勵(lì)、信號(hào)調(diào)理、濾波、失調(diào)和增益調(diào)整以及溫度補(bǔ)償。高級(jí)傳感器產(chǎn)品還包括模數(shù)轉(zhuǎn)換,并在單封裝中提供所有這些功能,從而實(shí)現(xiàn)完整且經(jīng)過校準(zhǔn)的傳感器至數(shù)據(jù)位的轉(zhuǎn)換功能。這類產(chǎn)品無需用戶進(jìn)行器件級(jí)設(shè)計(jì)或復(fù)雜表征與校正運(yùn)算,能夠以更少的投入實(shí)現(xiàn)更短的設(shè)計(jì)周期。雖然高度集成的傳感器產(chǎn)品可減輕進(jìn)行電路級(jí)設(shè)計(jì)決策的負(fù)擔(dān),但如果希望利用周期供電來降低平均功耗,仍有必要了解其內(nèi)部工作原理。歡迎轉(zhuǎn)載,本文來自電子發(fā)燒友網(wǎng)(http://www.nxhydt.com )
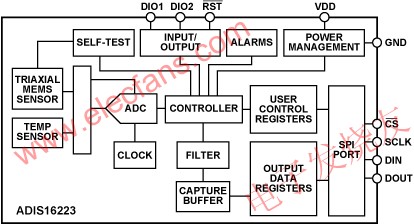
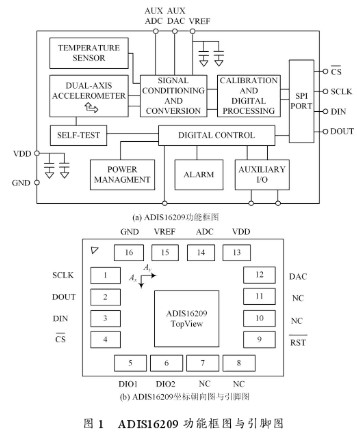
圖 1 顯示了許多完整傳感器系統(tǒng)相關(guān)的功能。每個(gè)傳感器元件都需要一個(gè)接口電路來將元件中的物理變化轉(zhuǎn)換為標(biāo)準(zhǔn)信號(hào)處理器件可用的電信號(hào)。例如,電阻應(yīng)變計(jì)就是應(yīng)力改變時(shí)阻抗發(fā)生變化的電阻,常以橋接電路的形式(帶激勵(lì)功能)將可變電阻轉(zhuǎn)換成電信號(hào)。另一個(gè)例子是集成式微機(jī)電系統(tǒng) (iMEMS?)慣性傳感器,如加速度計(jì)和陀螺儀。它們采用小型結(jié)構(gòu),通過極板間位移改變導(dǎo)致電節(jié)點(diǎn)間電容改變,從而對(duì)慣性運(yùn)動(dòng)變化做出響應(yīng)。可變電容元件的接口電路一般使用調(diào)制級(jí)和解調(diào)級(jí)組合,將電容變化轉(zhuǎn)變成電信號(hào)。
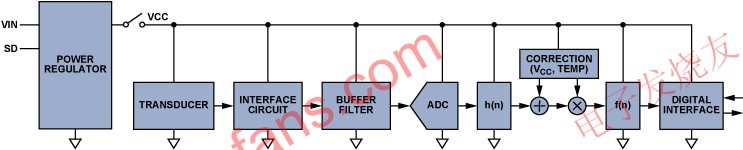
圖 1. 傳感器系統(tǒng)示例
緩沖級(jí)為模數(shù)轉(zhuǎn)換器(ADC)的輸入級(jí)準(zhǔn)備信號(hào),可包括電平轉(zhuǎn)換、增益、失調(diào)校正、緩沖和濾波功能。傳感器信號(hào)經(jīng)過數(shù)字化處理之后,數(shù)字處理功能便進(jìn)一步增加信息值。 數(shù)字濾波 h(n) 則可降低噪聲,重點(diǎn)關(guān)注目標(biāo)頻帶。例如,機(jī)器健康狀況檢測系統(tǒng)可能通過一個(gè)帶通濾波器來關(guān)注與一般機(jī)械裝置磨損相關(guān)的頻率特征。其他需要穩(wěn)定的直流基準(zhǔn)電壓的傳感器可能傾向于使用低通濾波器。
由于系統(tǒng)中很多其他器件的影響,傳感器精度可能有很大的差異。為了收縮誤差分布并提高測量確定性,傳感器系統(tǒng)通常包括一個(gè)校準(zhǔn)程序,以確定各傳感器在已知激勵(lì)和條件下的特性,并提供特定單位公式來校正在所有預(yù)期工作條件范圍內(nèi)輸出。最終處理級(jí)f(n)代表特定處理,例如用于將加速度計(jì)的靜態(tài)地心引力測量轉(zhuǎn)變成方位角的三角關(guān)系。
周期供電考慮因素
評(píng)估傳感器系統(tǒng)中周期供電的有效性時(shí),設(shè)計(jì)人員必須明確采集有用數(shù)據(jù)所花的時(shí)間。圖 2 顯示供電時(shí)一個(gè)典型的傳感器系統(tǒng)響應(yīng)。TM是測量時(shí)間,TC 是周期時(shí)間。測量時(shí)間取決于啟動(dòng)時(shí)間T1、建立時(shí)間T2和數(shù)據(jù)采集時(shí)間T3。
啟動(dòng)時(shí)間取決于系統(tǒng)處理器,以及支持傳感器數(shù)據(jù)采樣和信號(hào)處理操作所必須運(yùn)行的初始化程序。使用高度集成的傳感器系統(tǒng)時(shí),通常產(chǎn)品文檔中會(huì)規(guī)定啟動(dòng)時(shí)間。此類產(chǎn)品有時(shí)會(huì)提供休眠模式,其啟動(dòng)時(shí)間更快,但代價(jià)是其斷電功耗比關(guān)斷模式要高。
建立時(shí)間可包括傳感器、接口電路、濾波器和物理器件的電氣特性建立時(shí)間,以及熱建立時(shí)間和機(jī)械建立時(shí)間。某些情況下,這些過渡特性在上電時(shí)間內(nèi)建立,因此對(duì)總體測量時(shí)間影響很小,甚至沒有影響。但是,分析這些特性的最保守方法是假設(shè)這些情形是依次發(fā)生的,除非進(jìn)一步分析研究可以支持更有利的同時(shí)啟動(dòng)和建立假設(shè)。
數(shù)據(jù)采集時(shí)間取決于所需數(shù)據(jù)樣本的數(shù)量、系統(tǒng)處理器讀取數(shù)據(jù)的速度,以及精確數(shù)據(jù)采集準(zhǔn)備就緒后處理器可以開始工作的時(shí)間。
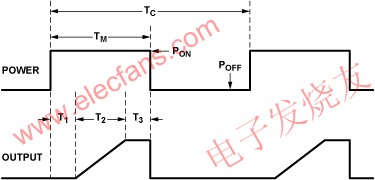
圖 2. 周期供電期間的傳感器響應(yīng)
分析示例
本示例通過評(píng)估一個(gè)完全集成的 MEMS 傾斜傳感器來確定影響精度和測量時(shí)間的參數(shù),從而明確功率與性能的重要關(guān)系。以下四個(gè)步驟對(duì)此過程提供了簡單的指引:
-
了解傳感器的工作原理。
-
通過產(chǎn)品文檔獲取相關(guān)信息。
-
評(píng)估未明確規(guī)定的重要參數(shù)。
-
推算出功率與性能的關(guān)系。
1. 了解工作原理
示例的傾斜傳感器系統(tǒng)與圖1中的通用系統(tǒng)非常相似。MEMS加速度計(jì)包括傳感器元件和接口電路。加速度計(jì)信號(hào)通過一個(gè)單極點(diǎn)低通濾波器,該濾波器將信號(hào)帶寬限制在50Hz。模數(shù)轉(zhuǎn)換器以200 SPS的采樣率運(yùn)行,并將其輸出送入數(shù)字處理級(jí)。數(shù)字處理功能包括一個(gè)均值濾波器、溫度驅(qū)動(dòng)器校正公式、將靜態(tài)加速度計(jì)讀數(shù)轉(zhuǎn)變成傾斜角的數(shù)學(xué)函數(shù)、用戶接口寄存器和一個(gè)串行接口。
假設(shè)偏置誤差為零,當(dāng)加速度計(jì)的測量軸與重力方向垂直時(shí),其輸出將為零。其測量軸與重力方向平行時(shí),將產(chǎn)生+1 g或–1 g的輸出,極性取決于方向。靜態(tài)加速度計(jì)測量與傾斜角之間的關(guān)系是一個(gè)簡單的正弦或正切函數(shù),如圖3所示。這里的分析重點(diǎn)考慮水平模式(正弦)。
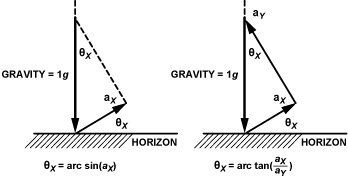
圖 3. MEMS傾斜傳感器工作原理
2. 通過產(chǎn)品文獻(xiàn)獲取相關(guān)信息
表 1 列出了影響高級(jí)傳感器系統(tǒng)周期供電的參數(shù)。這些參數(shù)一部分可從產(chǎn)品數(shù)據(jù)手冊獲得,而其他參數(shù)需要針對(duì)終端系統(tǒng)性能目標(biāo)進(jìn)行分析。PON和T1是數(shù)據(jù)手冊提供的參數(shù)。其余參數(shù)可用于估計(jì)T2和T3。關(guān)閉模式功率得自線性調(diào)節(jié)器的關(guān)斷電流。
表 1. 傳感器系統(tǒng)技術(shù)指標(biāo)
| 參數(shù) | 值 |
| 電源電壓 | +3.3 V |
| 功率,正常工作 | 46.2 mW (PON) |
| 功率,關(guān)閉模式 | 3.3 μW (POFF) |
| 功率,休眠模式 | 1.2 mW (POFFS) |
| 上電時(shí)間 | 190 ms (T1) |
| 休眠模式恢復(fù)時(shí)間 | 2.5 ms (T1S) |
| 加速度計(jì)范圍 | ±1.7 g |
| 傾斜角范圍 | ±30° |
| 低通濾波器 | –3 dB,50 Hz,單極點(diǎn) |
| 采樣速率 | 200 SPS |
| 數(shù)字濾波器 | 移動(dòng)平均,256,最大值 |
3. 利用經(jīng)驗(yàn)假設(shè)來量化其余影響因素
建立時(shí)間影響一個(gè)傳感器系統(tǒng)能夠支持的精度和測量速率。許多不同的因素都會(huì)影響建立時(shí)間,但這里重點(diǎn)分析電的因素。估計(jì)建立時(shí)間需要性能目標(biāo)、部分重要假設(shè)和一個(gè)用于分析傳感器對(duì)供電響應(yīng)的模型。第一項(xiàng)重要假設(shè)是濾波器在初始啟動(dòng)周期(上電時(shí)間)之后建立。雖然這兩個(gè)周期可以同時(shí)進(jìn)行,但以連續(xù)發(fā)生的方式著手分析是更為保守的方法。圖 4 提供分析傳感器對(duì)供電響應(yīng)的簡化模型。

圖 4. 建立時(shí)間分析的模型
供電后,加速度計(jì)傳感器的輸出 a(t)呈現(xiàn)階躍響應(yīng)。因?yàn)閭鞲衅鞑捎脝坞娫垂╇姡漭敵龊芸赡軙?huì)從零開始,并迅速轉(zhuǎn)變至確定其方位的電平。為簡明起見,假定零輸出與最低有效加速度水平相對(duì)應(yīng)。這種情況下,我們采用–2 g加速度,以便在最小額定值–1.7 g的基礎(chǔ)上提供一些裕量。同時(shí),最大傾斜范圍為+30°,相當(dāng)于+0.5 g。將這兩個(gè)間隔結(jié)合,加速度計(jì)信號(hào)在啟動(dòng)時(shí)可進(jìn)行的最大轉(zhuǎn)換為+2.5 g。單極點(diǎn)、低通濾波器的階躍響應(yīng) b(t)可通過以下公式獲得:
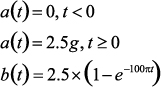
包括數(shù)字濾波器的模型需要離散形式的 b(t),以及一個(gè)總和模型來仿真濾波器。
建立時(shí)間是在規(guī)定精度AE范圍內(nèi)穩(wěn)定到最終值所需的時(shí)間。圖5顯示兩條瞬態(tài)響應(yīng)曲線,指示每條曲線達(dá)到0.1 g精度所需的建立時(shí)間。
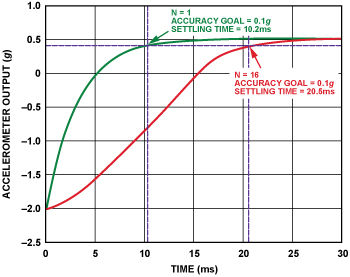
圖 5. 上電瞬態(tài)響應(yīng)
本例中,誤差預(yù)算允許0.2°的建立精度。正弦公式提供一種將此目標(biāo)轉(zhuǎn)變成加速度衡量指標(biāo)的簡單方法。
![]()
使用諸如Excel或MATLAB之類的工具對(duì)此公式進(jìn)行建模將非常簡單。如果使用Excel,輸出在N = 16時(shí)的第18次采樣和N=64 時(shí)的第65次采樣達(dá)到距0.5 g約3 mg內(nèi)的水平。將這些數(shù)值分別除以采樣速率(200 SPS),可針對(duì)21ms (N = 1)、 90ms (N = 16)和325ms (N = 64)這些設(shè)置提供建立時(shí)間估計(jì)值。假設(shè)熱建立的相關(guān)誤差可忽略不計(jì)(如合理的話)。因?yàn)樗剂康钠骷峁┝藴囟刃?zhǔn)響應(yīng),所以這一假設(shè)應(yīng)該可以接受。驗(yàn)證此假設(shè)為在最終表征過程中確認(rèn)精度提供了好機(jī)會(huì)。
此類系統(tǒng)的數(shù)據(jù)采集時(shí)間T3不需要超過一個(gè)采樣周期,因?yàn)樗斜匦璧男U蜑V波都在器件內(nèi)部實(shí)現(xiàn)。采集時(shí)間只會(huì)使總體測量時(shí)間增加5ms。
4. 使功耗與周期時(shí)間相關(guān)
此分析的最后一部分與平均功耗和周期時(shí)間有關(guān),周期時(shí)間實(shí)際上等于各測量事件之間的時(shí)間量。表2總結(jié)了重要的周期供電因素,包括傳感器數(shù)據(jù)手冊中規(guī)定或通過該簡單分析過程產(chǎn)生的因素,以及完全啟動(dòng)(周期供電)和休眠模式恢復(fù)(周期休眠)的次數(shù)。
表 2.關(guān)鍵周期供電參數(shù)匯總
| ? | 周期供電 | 周期休眠 |
| PON |
46.2 mW
|
|
| POFF | 3.3 μW | 1.15 mW |
| TM, N = 1 | 190 + 21 + 5 = 216 ms | 2.5 + 21 + 5 = 28.5 ms |
| TM, N = 16 | 190 + 90 + 5 = 285 ms | 2.5 + 90 + 5 = 97.5 ms |
| TM, N = 64 | 190 + 325 + 5 = 520 ms | 2.5 + 325 + 5 = 332.5 ms |
下面通過計(jì)算舉例說明,如何使用這些參數(shù)來分析和比較一個(gè)要求測量速率為1SPS的系統(tǒng)的周期供電和周期休眠。
周期供電:
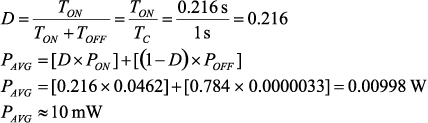
周期休眠:
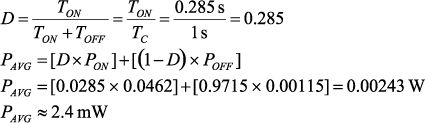
這里的周期休眠非常有利。但是,如果將周期時(shí)間增加至每分鐘采樣一次(TC = 60 s),周期供電方式的平均功耗會(huì)是0.2mW,而周期休眠方式為1.2 mW。圖6所示為周期時(shí)間與平均功耗的關(guān)系。
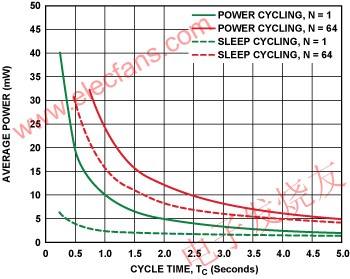
圖 6.周期時(shí)間與平均功耗的關(guān)系
休眠模式保留全部初始化值,同時(shí)關(guān)閉系統(tǒng)其余部分。盡管保持這些設(shè)置需要一定功率,但恢復(fù)時(shí)間要比完全啟動(dòng)更快。傾斜傳感器ADIS16209具有可編程休眠時(shí)間和自動(dòng)喚醒功能。這種解決方案非常適用于那些具有數(shù)據(jù)就緒信號(hào)喚醒功能的主處理器,在讀取所需數(shù)據(jù)后命令傳感器再次在另一個(gè)固定的周期內(nèi)重新處于休眠模式。使用休眠模式的另一 MEMS產(chǎn)品實(shí)例是振動(dòng)傳感器ADIS16223,該傳感器收集并儲(chǔ)存振動(dòng)數(shù)據(jù),自動(dòng)返回至休眠模式,然后啟動(dòng)對(duì)另一測量事件的倒計(jì)時(shí)。這種傳感器非常適合需要進(jìn)行周期性監(jiān)控的系統(tǒng),無需分配處理器資源來管理休眠模式和數(shù)據(jù)收集模式。
這里通過簡單分析提供了部分有用的深度信息。具體而言,在某些情況下,不管休眠模式需要多少功率,通過休眠模式管理仍然能夠?qū)崿F(xiàn)節(jié)能。在上述示例中,需要以1 SPS速率進(jìn)行傾斜測量的系統(tǒng)采用休眠模式,省電能力提高了4倍。此處,休眠模式針對(duì)最高6s的測量周期時(shí)間可實(shí)現(xiàn)節(jié)能。對(duì)于測量周期時(shí)間更長的系統(tǒng),與關(guān)斷性能相關(guān)的功率開銷更低,從而使得平均功率電平更低。
結(jié)論
無論是出于經(jīng)濟(jì)還是環(huán)保原因,降低功耗的要求都很普遍。降低功耗可以減小功率轉(zhuǎn)換器、電池和太陽能電池等電源的尺寸和成本。其他潛在好處還包括降低熱和機(jī)械設(shè)計(jì)要求,降低EMI輻射,有利于環(huán)境影響評(píng)級(jí)。歡迎轉(zhuǎn)載,本文來自電子發(fā)燒友網(wǎng)(http://www.nxhydt.com)
對(duì)于重視高集成度傳感器產(chǎn)品但又不得不考慮盡可能降低功耗的工程師而言,本文提到的概念和分析方法提供了一個(gè)很好的起點(diǎn)。更重要的是,因?yàn)槊糠N系統(tǒng)設(shè)計(jì)都存在新的機(jī)會(huì)與風(fēng)險(xiǎn),所以確定并分析影響總體功率目標(biāo)特性的相關(guān)思考過程將更加重要。完成初始分析之后,或許一句俄羅斯諺語“Доверяй, но проверяй`”(“信任,但要確認(rèn)”)最能說明該如何確保最終成功實(shí)現(xiàn)。要跟蹤重要假設(shè),例如建立精度(3 mg)及熱建立因素是否會(huì)有影響。如果有合適的硬件,要在盡可能匹配其預(yù)期使用條件的情況下測試這些解決方案。最后,測試這些假設(shè)將增加自信,并可調(diào)整改善新假設(shè),以用于今后的電源管理方法分析。










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論