 電子發燒友App
電子發燒友App


引言
本文介紹了如何利用MAXQ7667智能SoC (片上系統)確定超聲傳感器的諧振頻率和阻尼特性。這些功能有助于診斷傳感器模塊,優化系統性能,并且可以在生產過程中用于校準。本應用筆記并非針對所有系統泛泛地討論“如何實現”,而是針對特定的傳感器模型討論設計細節以及特定條件下的性能。利用這些信息,用戶可以大大簡化系統測試。另外,這些測試假定超聲波反射目標與傳感器的距離大于1英尺。
測試裝置
本文中的所有測試數據取自MAXQ7667 EV (評估)板,這些數據通過評估板的RS-232串口傳送到PC,然后利用Excel表產生曲線圖。傳感器采用隨評估板提供的40kHz 400EP250。傳感器水平安裝在電路板上,可以方便地在傳感器上加裝其它材料以改變傳感器的性能。這里采用了三種傳感器條件應用于各種測試:清潔干燥的傳感器(正常工作條件)、在傳感器表面注水、傳感器表面附有油漬。
圖1至圖3顯示了這些不同條件下傳感器的參數,可以看到有較大的差異。傳感器表面注水會降低傳感器的諧振頻率、減小阻尼;油漬的影響則相反,會提高諧振頻率、并顯著增大阻尼。
阻尼測試
阻尼測試用于測量傳感器的諧振時間,測試非常簡單,首先產生一個短脈沖激勵傳感器,然后監測傳感器輸出,觀察信號的衰減速度。圖1至圖3給出了三種不同頻率下回波接收通道的阻尼。從三組曲線可以很容易看出油漬會導致強阻尼。另外,如果觀察阻尼的細微變化,這些曲線還顯示了接收頻率的重要作用。
由于該測試非常簡單,可以在多個頻率下進行測試。在多個頻率下進行測試時,最好保持相對恒定的激勵脈沖寬度。利用一個持續時間固定的激勵窄脈沖,可以消除傳感器能量變化或者在諧振頻率處激勵傳感器造成的差異。
圖1、圖2和圖3中,以25μs的間隔采集LPF (低通濾波器)輸出,傳感器激勵脈沖寬度近似為6μs。注意,如果只使用一個頻率并且PLL已處于所要求的頻率,該測試可以在低于3ms的間隔下進行。在兩次測量之間有充分的時間觀測峰值,并檢測信號衰減到給定峰值百分比的時間。如果使用多個頻率,可能需要額外的測量時間,同時也需要更多時間使PLL穩定到一個新的頻率。
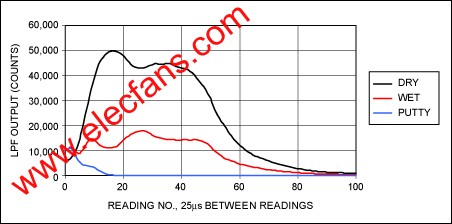
圖1. 利用40kHz中心頻率濾波器時的阻尼測量
?
圖2. 利用35kHz中心頻率濾波器時的阻尼測量
?
圖3. 利用45kHz中心頻率濾波器時的阻尼測量
掃頻
掃頻可以確認傳感器的諧振頻率。圖4清楚地顯示了不同外加材料(三種不同測試條件)對傳感器諧振頻率的影響。從圖4數據可以看出:接收器中心頻率以400Hz的間隔從30kHz變化到50kHz,共計51個頻率。對于51個頻率的每個頻率,從激勵到讀取LPF輸出的時間間隔相同。診斷時需要特別注意:從激勵到讀取LPF數據的時間間隔必須正確。這個時間間隔必須足夠長,使回波接收通道脫離飽和;但還要足夠短,保證傳感器仍然能夠產生比較強的信號。似乎單一的固定時間間隔很難滿足所有條件。例如,從圖2可以明顯看出,如果傳感器有油漬,信號在正常的傳感器脫離飽和之前就被完全衰減掉。考慮到這種狀況,必須動態調整從激勵到測量LPF輸出的時間間隔。幸運的是阻尼測試(見下文)可以很容易地確定一個較好的時間間隔。
為了收集圖4數據(即LPF輸出數據),阻尼測試首先在三種不同頻率下進行,保存從激勵到信號衰減到峰值一半的時間。三次測試的最長時間間隔將用作掃頻測試的時間間隔。這個過程確定了能夠保證任何傳感器條件下都可以產生較好的輸出信號的時間間隔。
?
圖4. 三種傳感器測試條件下的掃頻測試
總之,為了確定從激勵到測量的時間間隔,掃頻測試之前至少進行一次阻尼測試。掃頻測試需要比阻尼測試更長的時間。頻率步進變化多個頻點,每個頻率必須在激勵傳感器以及進行相應的測量之前建立。這種情況下,整個測試大約需要650ms。如果PLL頻率建立時間較短,或者是減少測量頻點、降低阻尼測試次數,可以縮短測試時間。而這些改變會導致傳感器測量參數精度的降低,但能夠滿足絕大多數應用的要求。
圖4數據顯示了傳感器相當寬的諧振頻帶,與傳感器本身的性能相比,這個諧振帶寬與MAXQ7667的帶通濾波器帶寬的關系更密切。即便如此,這個測試仍然對確定傳感器的中心頻率非常有用。
簡化測試條件
本應用筆記提供的圖表為設計人員提供了一個簡便的參考,但很難進行自動診斷。為了簡化測試過程,可以將數據減少到幾個數值,然后將這些數值和表格中的參考值進行對比。這些參考值可以按溫度排序。而溫度很容易通過SAR ADC和熱敏電阻得到。
以下程序代碼(附錄A)用于捕獲圖4中的數據,該程序還提供了三方面的數據,可用于定義傳感器的條件。這些數據是:
阻尼測試中,諧振頻率處的LPF峰值數據。
阻尼時間,或者是從激勵到信號衰減至峰值一半的時間。
中心頻率或諧振頻率,該數值表示為PLL的建立時間,是下限PLL建立時間(信號為峰值的70%)和上限PLL建立時間(信號為峰值的70%)的平均值,其中70%是任意決定的。
表1分別顯示了三種傳感器條件下的數據。通過這些數據,診斷程序很容易區分傳感器所處的條件。
表1. 各種傳感器工作條件下的數據總結 Peak LPF Reading (Counts)Damping Time (μs)Center Frequency (PLL)
Dry244771394290
Wet247401435150
Putty158540323430
可以下載用于IAR?編譯器2.12A的完整軟件,如果將評估板的RS-232串口連接到PC的COM1,運行PC程序Transducer_Calibrate_115k2.exe,將會顯示隨頻率變化的諧振曲線和評估的諧振頻率(圖5)。
?
詳細圖片(PDF, 325kB)
圖5. 輸出曲線圖示例
附錄A. 軟件例程
MAXQ7667傳感器校準文件
// This routine measures the transducer damping at the specified frequency (PLLfreq).
// The system timer is used to measure when the LPF output (LPFD) has dropped to 1/2 the peak value.
// This is the settling time that will be used later when doing the frequency sweep.
unsigned damping_half_time (unsigned PLLfreq, unsigned pulse_width)
{
unsigned short i;
unsigned short peak = 0;
unsigned short half_peak = 0;
unsigned short temp = 0;
SCNT_bit.STIME = 0; // Make sure system timer is off.
STIM = 0; // Clear the system timer.
SCNT_bit.STDIV = 4; // Set system timer prescale divider to 16 (1μs per cycle).
PLLF_bit.PLLF = PLLfreq; // Set the PLL frequency.
BPH = pulse_width; // Pulse width = BPH/(receive frequency * 400) when BDIV = 0xC.
usWaitTimer2(10000); // Let the PLL settle for 10ms.
SCNT_bit.STIME = 1; // Start the system timer.
BPH_bit .BSTT = 1; // Send a burst.
usWaitTimer2(50); // Wait for LPF to partially settle.
RunTimer0_us(20); // Start timer # 1 with a reload time of every 20μs.
for (i = 0; i < 200; i++)
{
temp = LPFD; // Read the output of the lowpass filter.
if (temp > 0x2000 && temp > peak) {peak = temp;} // Save the peak value if it is greater than 2000.
if (temp < peak/2 && half_peak == 0) // If LPFD is less than half the peak value and the half peak time
{ // has not been set, then
half_peak = STIM; // save the time it took to reach half the peak value.
i = 101; // Half peak found so exit the loop.
}
while (T2CNB0_bit.TF2 == 0) {} // Wait for timer # 0.
T2CNB0_bit.TF2 = 0; // Clear flag.
}
T2CNA0_bit.TR2 = 0; // Stop timer # 0.
return half_peak;
}
void main()
{
unsigned short i = 0;
unsigned short peak = 0;
unsigned short first70 = 0;
unsigned short second70 = 0;
unsigned short center_pllf;
unsigned short wait2measure;
unsigned short halfpeak;
init();
// **********************************
// **********************************
// Configuration settings
echo_receive_gain(0); // Set receiver to minimum gain (allowed values 0-31)
Burst_Clock_Divider = 400; // for calculating the burst-frequency in PC-Application.
burst_setup(BURST_CLK_PLL, BURST_PULSE_1, BURST_DIV_400, 0, PLL_CLOCK_16MHZ, 0);
step_size=10; // Sets the step-size (steps go from 0 to 511).
// END configuration settings.
// ******************************
// ******************************
while(1)
{
// Use the "damping_half_time" routine to measure the time in μs that it takes for the
// ringing to drop to half of the peak value. Do this at more than one frequency so that
// one of the frequencies will be within range of the transducer.
wait2measure = damping_half_time(128, 88); //Measure damping time at 35kHz.
halfpeak = damping_half_time(256, 101); //Measure damping time at 40kHz.
if (wait2measure < halfpeak) {wait2measure = halfpeak;} // Save the longest time.
halfpeak = damping_half_time(384, 113); //Measure damping time at 45kHz.
if (wait2measure < halfpeak) {wait2measure = halfpeak;} // Save the longest time.
// Repeatedly pulse the transducer with a constant width pulse while sweeping the receiver
// frequency. Use the half-time value from the damping test (wait2measure) for the interval
// between pulse transmission and reading LPFD (lowpass filter data).
PLLF_bit.PLLF = 0; // Start the sweep at 30kHz.
BPH = 77; // Pulse ~6.3μs. This value is easy to maintain over frequency.
peak = 0;
number_of_steps = 0;
do // Sweep from 30kHz to 50kHz with step_size * 39.062500kHz.
{
usWaitTimer2(5000); // Wait 5ms for the frequency to settle.
STIM = 0; // Reset the system timer. It controls the Pulse to LPF read time.
BPH_bit .BSTT = 1; // Send burst.
while(STIM < wait2measure) {} // Wait the specified amount of time for the ringing to dampen.
lpfdata[number_of_steps]= LPFD; // Store the LPF reading.
if(lpfdata[number_of_steps]> peak) {peak = lpfdata[number_of_steps];} //Save the peak value.
number_of_steps++;
PLLF_bit.PLLF = number_of_steps * step_size; // Increase the frequency.
BPH = 77 + number_of_steps; // Increase the duty cycle to maintain pulse width.
} while (PLLF < 512-step_size);
// Find the center frequency based on the average of the two frequencies that have a
// LPFD reading that is 70% of the peak reading.
for (i = 0; i < number_of_steps; i++)
{
if (lpfdata[i] > peak*0.7)
{
first70 = i;
i = number_of_steps;
}
}
for (i = number_of_steps; i >0; i--)
{
if (lpfdata[i] > peak*0.7)
{
second70 = i;
i= 1;
}
}
i = (first70 + second70)/2; // i = the loop value at the center frequency.
center_pllf = i*step_size; // Set PLLF_bit.PLLF to this value for the resonant frequency.
//Remeasure damping using the center frequency.
damp_time = damping_half_time(center_pllf, 75);
// At this point there are three valuable pieces of information about the transducer.
// Peak = the peak value from the frequency sweep.
// center_pllf = the PLLF setting at the resonant frequency.
// damp_time = time for the resonance to decay to 1/2 the peak value.
center_burst_frequency = 16000000/Burst_Clock_Divider*(center_pllf+768)/1024;
SendData();
} // While(1)
} // End Main













 工商網監
工商網監
評論