 電子發(fā)燒友App
電子發(fā)燒友App


對(duì)于汽車中電子器件,人們很容易一下子列舉出MCU、大量的傳感器、驅(qū)動(dòng)部件等,似乎很難想起“不太起眼”的模數(shù)轉(zhuǎn)換器(ADC)。事實(shí)上,ADC特別是Σ-Δ型ADC分布在汽車的各個(gè)角落中。ADC正在使傳統(tǒng)意義上的傳感器變得不再傳統(tǒng),傳統(tǒng)意義上的傳感器通常擔(dān)當(dāng)?shù)氖?a target="_blank">信號(hào)調(diào)整的角色,即將客觀世界中一些非常微小的小信號(hào)轉(zhuǎn)換成可以被電子器件識(shí)別的電信號(hào),但是現(xiàn)在的技術(shù)趨勢(shì)是這些傳統(tǒng)的純模擬的傳感器內(nèi)部正在越來(lái)越多的引入數(shù)字處理的部分,而這其中就包括了Σ-Δ型ADC。
業(yè)界越來(lái)越多地將傳感器和Σ-Δ型ADC進(jìn)行融合,來(lái)優(yōu)化傳感器的性能。工程師們同時(shí)在模擬信號(hào)采集和數(shù)字后處理要求的兩個(gè)方面考察傳感器和轉(zhuǎn)換器,這不僅可以使轉(zhuǎn)換器“充分激發(fā)”傳感器元件的效能,以此優(yōu)化傳感器性能,而且將成本減至最低。
汽車應(yīng)用為何青睞Σ-Δ型ADC
Σ-Δ型ADC通常被認(rèn)為是最復(fù)雜的模數(shù)轉(zhuǎn)換器架構(gòu),它的模擬部分非常簡(jiǎn)單(類似于一個(gè)1bit ADC),而數(shù)字部分則要復(fù)雜得多,它綜合運(yùn)用獨(dú)特的“采樣”與“降噪”技術(shù),按照功能劃分為數(shù)字濾波和抽取單元。由于Σ-Δ型ADC更接近于一個(gè)數(shù)字器件,所以其制造成本相對(duì)低廉。
通常,Σ-Δ型ADC的分辨率非常高(16-24 位),不過(guò)速度較低(10-480 KSPS)。由于采用高倍率過(guò)采樣技術(shù),降低了對(duì)傳感器信號(hào)進(jìn)行濾波、前置放大的要求,實(shí)際上取消了信號(hào)調(diào)理,所以非常適合測(cè)量來(lái)自應(yīng)變計(jì)、熱電偶和電阻溫度傳感器等傳感器的小信號(hào)而無(wú)需采樣保持放大器或增益調(diào)整放大器。
由于集成度的增加,先進(jìn)的“數(shù)字傳感器”產(chǎn)品具有各種各樣的設(shè)計(jì)優(yōu)勢(shì)或更加“智能”。ADC可以使用內(nèi)部校準(zhǔn)和線性化程序來(lái)處理傳感器輸出;傳感器可以校正傳感器增益和偏移,并產(chǎn)生片內(nèi)傳感器激勵(lì)信號(hào);數(shù)字控制型可編程增益放大器可用來(lái)“優(yōu)化”ADC至特定傳感器讀數(shù),然后重新配置以從相同的傳感器讀取一個(gè)不同的信號(hào)。ADC內(nèi)置溫度監(jiān)控功能并根據(jù)溫度調(diào)節(jié)轉(zhuǎn)換器輸出,可計(jì)算并消除熱誤差。微機(jī)電(MEMS)傳感器如加速度計(jì)和陀螺儀,同樣也結(jié)合了數(shù)據(jù)傳感器來(lái)感應(yīng)慣性和旋轉(zhuǎn)運(yùn)動(dòng),非常適用于汽車安全及穩(wěn)定控制系統(tǒng)等一系列汽車應(yīng)用場(chǎng)合。總之,這意味著設(shè)計(jì)人員不必像以往那樣過(guò)多關(guān)注如何處理具體的傳感器性能問(wèn)題,從而加快上市并大多能改善性能。
引入數(shù)字處理的部分使汽車電子系統(tǒng)可以實(shí)現(xiàn)一些非常先進(jìn)非常有用的功能,這些功能包括零點(diǎn)消除、自診斷、濾波頻段的設(shè)定、量程可調(diào)等。而Σ-Δ型ADC之所以能在這其中擔(dān)當(dāng)重要角色,主要緣于它的架構(gòu)。
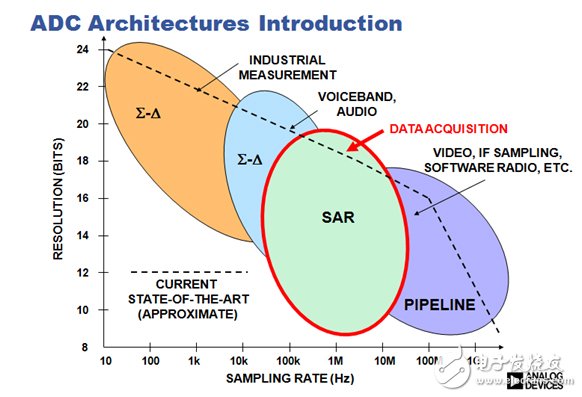
圖2.各種ADC架構(gòu)比較。
如上圖2所示為各種架構(gòu)的ADC采樣率和精度的比較。通常我們有這樣的共識(shí):最常用的通用架構(gòu)一般是逐次逼近寄存器 (SAR) 型;而用于高分辨率(要求對(duì)從小到大的各種信號(hào)進(jìn)行數(shù)字化處理的工業(yè)領(lǐng)域)的主要類型是Σ-Δ型;當(dāng)前處理高速信號(hào)的模數(shù)轉(zhuǎn)換器大多是流水線型。
我們先來(lái)看一輛汽車對(duì)ADC動(dòng)態(tài)范圍和分辨率的要求。汽車應(yīng)用中通常要處理大的動(dòng)態(tài)范圍的信號(hào),例如如果要檢測(cè)電池的電量,當(dāng)發(fā)動(dòng)機(jī)熄火時(shí),這時(shí)待機(jī)電流只有幾十毫安,而當(dāng)起動(dòng)機(jī)啟動(dòng)時(shí),工作電流可以達(dá)到幾百安,相差將近10萬(wàn)倍,要檢測(cè)這么大的動(dòng)態(tài)范圍的信號(hào),當(dāng)然需要具有大的動(dòng)態(tài)范圍和非常高分辨率的ADC架構(gòu)了。Σ-Δ型具有的寬動(dòng)態(tài)范圍非常適合這一應(yīng)用。除此之外,Σ-Δ型ADC高分辨率的特性還非常適合于汽車的安全應(yīng)用。
雖然Σ-Δ型ADC相比其它架構(gòu)的ADC速度并不高,但這并不影響它在汽車中的應(yīng)用。如對(duì)于車輛側(cè)翻的檢測(cè),汽車一側(cè)輪胎在開(kāi)始抬起時(shí)候的角速度并不高。
Σ-Δ型ADC在汽車安全系統(tǒng)中的應(yīng)用
圖3體現(xiàn)了Σ-Δ型ADC在MEMS傳感器中的應(yīng)用實(shí)例,包括三個(gè)方面:安全氣囊、電子穩(wěn)定系統(tǒng)、側(cè)翻的穩(wěn)定系統(tǒng)。
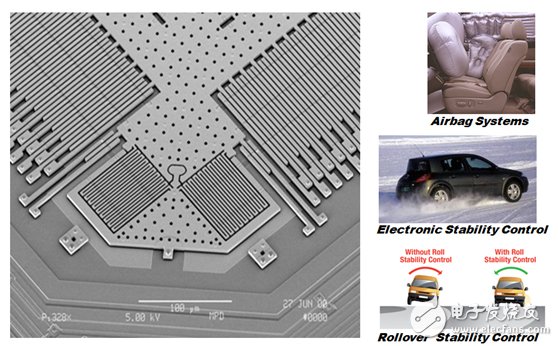
圖3. 集成了Σ-Δ型ADC的MEMS傳感器用于汽車安全系統(tǒng)。
無(wú)論是安全氣囊還是電子穩(wěn)定系統(tǒng)或者側(cè)翻的穩(wěn)定系統(tǒng),其系統(tǒng)設(shè)計(jì)原理都是基于用MEMS傳感器來(lái)檢測(cè)車的姿態(tài)。比如安全氣囊,當(dāng)碰撞發(fā)生的時(shí)候去檢測(cè)這個(gè)碰撞所帶來(lái)位移的加速度和減速度,當(dāng)加速度達(dá)到一定程度,才能判斷這是一個(gè)碰撞,而不是汽車本身的剎車帶來(lái)的減速度,這里的MEMS傳感器不只是檢測(cè)信號(hào),還作為一個(gè)決策者的角色而存在。
對(duì)于電子穩(wěn)定系統(tǒng),則要判斷汽車在雪地上的轉(zhuǎn)彎是不是還帶有側(cè)滑,汽車轉(zhuǎn)彎時(shí)有一個(gè)角速度,當(dāng)這個(gè)角速度達(dá)到一定的水平就是異常的側(cè)滑而不是車輛本身的轉(zhuǎn)彎。而側(cè)翻的趨勢(shì)也是一個(gè)角速度。這其中都會(huì)用到各種各樣MEMS傳感器,如加速度計(jì)和陀螺儀。
這些MEMS傳感器由許多非常微小的微米級(jí)的小彈片組成,如上圖3。當(dāng)汽車發(fā)生碰撞或者有姿態(tài)變化的時(shí)候,加速度就會(huì)帶來(lái)一個(gè)位移,這個(gè)位移就會(huì)帶來(lái)一個(gè)電信號(hào)的變化,具體來(lái)說(shuō)是電容信號(hào)的變化。通過(guò)這樣的結(jié)構(gòu),就把動(dòng)作的趨勢(shì)轉(zhuǎn)化成了電信號(hào)的變化,沒(méi)有動(dòng)作發(fā)生的時(shí)候,信號(hào)是0,當(dāng)有動(dòng)作的發(fā)生的時(shí)候,就輸出信號(hào),并且動(dòng)作幅度越大,電信號(hào)也越大。
但是,MEMS傳感器檢測(cè)的電信號(hào)是非常微弱的,這就需要將它放大,然后才能用一定采樣位數(shù)的轉(zhuǎn)換器轉(zhuǎn)換成數(shù)字信號(hào)輸出,再送給單片機(jī)或處理器進(jìn)行分析,才能得到具體的加速度數(shù)值。這就是傳統(tǒng)的老一代MEMS傳感器的架構(gòu),它包含一個(gè)驅(qū)動(dòng)用以驅(qū)動(dòng)機(jī)械MEMS的單元,然后再用交流做激勵(lì),將動(dòng)作發(fā)生時(shí)候差分的電信號(hào)進(jìn)行放大解調(diào)輸出,所以這是一個(gè)模擬的信號(hào),當(dāng)外部動(dòng)作帶來(lái)位移變化的時(shí)候,通過(guò)MEMS的單元變成電信號(hào)直接輸出。
技術(shù)在不斷的演進(jìn),上述老一代MEMS傳感器變得越來(lái)越過(guò)時(shí),新一代的傳感器設(shè)計(jì)面臨很多新的挑戰(zhàn),比如:
1. 數(shù)據(jù)輸出的接口有標(biāo)準(zhǔn)的要求(模擬接口向數(shù)字接口轉(zhuǎn)變);數(shù)據(jù)安全性標(biāo)準(zhǔn)問(wèn)題;
2. 測(cè)量范圍的擴(kuò)大(即同樣的一個(gè)傳感器單元要能夠?qū)崿F(xiàn)低量程到高量程的自適應(yīng));
3. 輸出信號(hào)頻帶可選性(即位移發(fā)生時(shí)候的信號(hào)是很多頻率信號(hào)混雜在一起的,有高頻的,有低頻的,因?yàn)榕鲎彩且粋€(gè)綜合事件。而安全氣囊要不要彈開(kāi)?這就需要去判斷特定頻帶下的一個(gè)信號(hào));
4. 自測(cè)機(jī)制(傳感器是整個(gè)判斷機(jī)制的主要信息來(lái)源,根據(jù)傳感器的數(shù)據(jù)來(lái)決定氣囊是不是要彈開(kāi)?那么這個(gè)決策如果錯(cuò)了,不彈開(kāi),那后果可想而知,但是不該彈開(kāi)的時(shí)候彈開(kāi)了后果也可想而知。所以傳感器的數(shù)據(jù)必須可靠,所以必須有自測(cè)的功能);
5. 溫度的補(bǔ)償;零點(diǎn)的補(bǔ)償?shù)纫捕挤浅V匾_@些要求如果純粹用純模擬的器件完成,雖然可以把精度做的很高,例如使用非常高性能的運(yùn)放、調(diào)理電路,但是沒(méi)法做出靈活性和可重復(fù)性。
而新一代MEMS傳感器集成Σ-Δ型ADC后,由于Σ-Δ架構(gòu)輸出的是數(shù)字信號(hào),所以可以非常方便的對(duì)其進(jìn)行零點(diǎn)校正、溫度補(bǔ)償?shù)龋羞@些任務(wù)都可以在Σ-Δ型ADC內(nèi)部實(shí)現(xiàn)。
ADXRS800:集成16位Σ-Δ型ADC的汽車級(jí)角速度傳感器
ADXRS800是一款極其穩(wěn)定、振動(dòng)抑制性能極高的創(chuàng)新型汽車級(jí)陀螺儀,適合汽車電子穩(wěn)定性控制、側(cè)翻檢測(cè)和俯仰檢測(cè)等應(yīng)用。它集成了16位Σ-Δ型ADC,對(duì)線性加速度的抵御度為0.03°/s/g,振動(dòng)校正特性為0.0002°/s/g2,+105°C時(shí)的噪聲密度為0.02°/s/√Hz,整個(gè)工作溫度范圍內(nèi)和產(chǎn)品壽命期間的零點(diǎn)失調(diào)偏差最大值僅為3°/s。
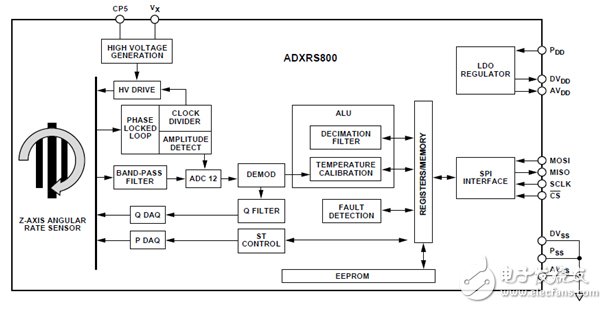
圖4. ADXRS800:第一顆汽車用數(shù)字型角速度傳感器。
ADXRS800的連續(xù)自測(cè)架構(gòu)簡(jiǎn)化了故障檢測(cè)算法,系統(tǒng)設(shè)計(jì)師可以將故障檢測(cè)快速集成到設(shè)計(jì)中。其機(jī)電系統(tǒng)的完整性通過(guò)以下方法來(lái)檢查:對(duì)傳感結(jié)構(gòu)施加一個(gè)高頻靜電力,以便與基帶中的實(shí)際速率信號(hào)區(qū)分開(kāi)來(lái),然后濾除實(shí)際速率信號(hào),使傳感器輸出不受干擾。
由于動(dòng)態(tài)范圍非常寬,ADXRS800能夠檢測(cè)高達(dá)±300°/s的角速率,同時(shí)在低端提供80 LSB/°/s的高分辨率。采用80 Hz濾波器時(shí),噪聲低至0.16°/s rms。角速率數(shù)據(jù)以16位字形式提供,作為32位串行外設(shè)接口(SPI)消息的一部分。
汽車電池監(jiān)控系統(tǒng)中的用武之地
ADI公司集成了16位Σ-Δ型ADC、PGA、和處理器內(nèi)核的精密傳感器SoC ADuC703x為用戶提供了一個(gè)經(jīng)濟(jì)、高效的電池測(cè)量方案,可實(shí)現(xiàn)超高動(dòng)態(tài)范圍和精度的電流測(cè)量、電壓測(cè)量、和溫度測(cè)量。ADuC703x不僅可配合監(jiān)控器IC來(lái)進(jìn)行新能源汽車電池的監(jiān)控,還在傳統(tǒng)汽車的電池監(jiān)控中有極高的市場(chǎng)占有率。
Start-Stop系統(tǒng)在汽車等紅燈的時(shí)候,將發(fā)動(dòng)機(jī)熄滅,而當(dāng)綠燈亮的時(shí)候再點(diǎn)著,這樣做的目的是不讓發(fā)動(dòng)機(jī)空轉(zhuǎn),還能省下很多油。這個(gè)應(yīng)用目前在歐洲的使用率很高。而這個(gè)系統(tǒng)的大功臣就是電池傳感器,有了它就能夠知道電池的狀態(tài),從而為駕駛者下一步的動(dòng)作提供依據(jù)。
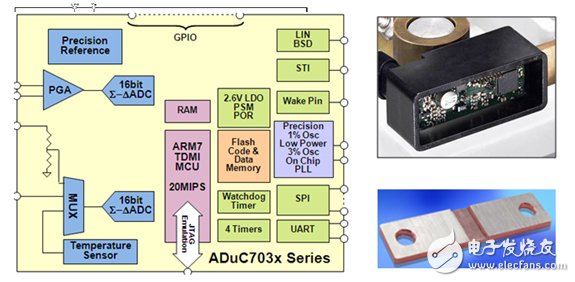
圖5. Σ-Δ型ADC用于汽車電池監(jiān)控系統(tǒng)。
該電池監(jiān)控系統(tǒng)設(shè)計(jì)有一些非常苛刻的要求,需要將一個(gè)傳感器安裝在電池部位去精確的檢測(cè)電池的電壓、電流和溫度,根據(jù)這些計(jì)算電池的電量狀態(tài)。極寬的電流范圍是很大的挑戰(zhàn),汽車啟動(dòng)時(shí)的電流達(dá)到幾百安培的水平,而熄火的時(shí)候又只有幾十毫安,從幾百安到幾十毫安幾萬(wàn)倍的動(dòng)態(tài)范圍都得測(cè)。
一般是將檢流電阻安裝在電池充放電的回路里,電流流過(guò)產(chǎn)生非常小的電壓,幾毫安的時(shí)候電壓才是微伏級(jí)。這么小的信號(hào)很難檢測(cè),所以需要將信號(hào)放大很多倍;而當(dāng)汽車正常行駛的時(shí)候電流又很大,這時(shí)檢流電阻上的電壓很大,所以電池傳感器要求有非常大的放大倍數(shù)和非常高的分辨率,并且因?yàn)閯?dòng)態(tài)范圍很大,16位的ADC不夠測(cè)量,還必須加上PGA,ADC與PGA兩者相結(jié)合,調(diào)整放大倍數(shù),才能測(cè)量從毫安級(jí)到百安級(jí)的動(dòng)態(tài)范圍。
如前所述,ADuC703x中加入了許多其他功能,如PGA、16位Σ-Δ型ADC、零點(diǎn)消除、零點(diǎn)斬波等。業(yè)內(nèi)人士知道,一般單獨(dú)的PGA、Σ-Δ型ADC性能優(yōu)良較容易做到,它們整合起來(lái)真正做到高分辨率和高精度,是需要相當(dāng)?shù)募夹g(shù)實(shí)力的,尤其在如上述這么大動(dòng)態(tài)范圍情況下。ADuC703x用16位ADC就能檢測(cè)到20mA的精度,這是目前業(yè)界最高水平。








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論