 電子發燒友App
電子發燒友App


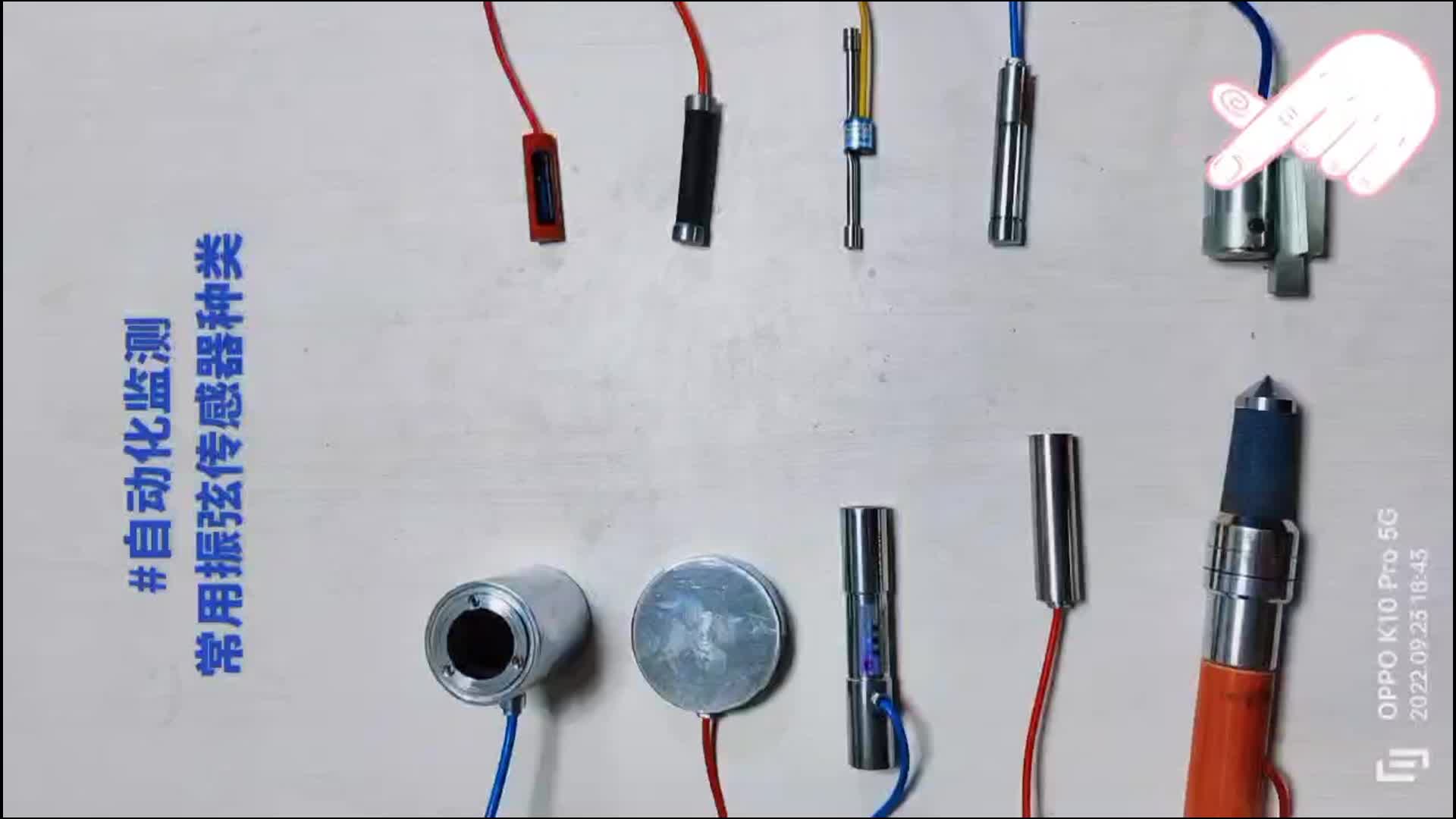
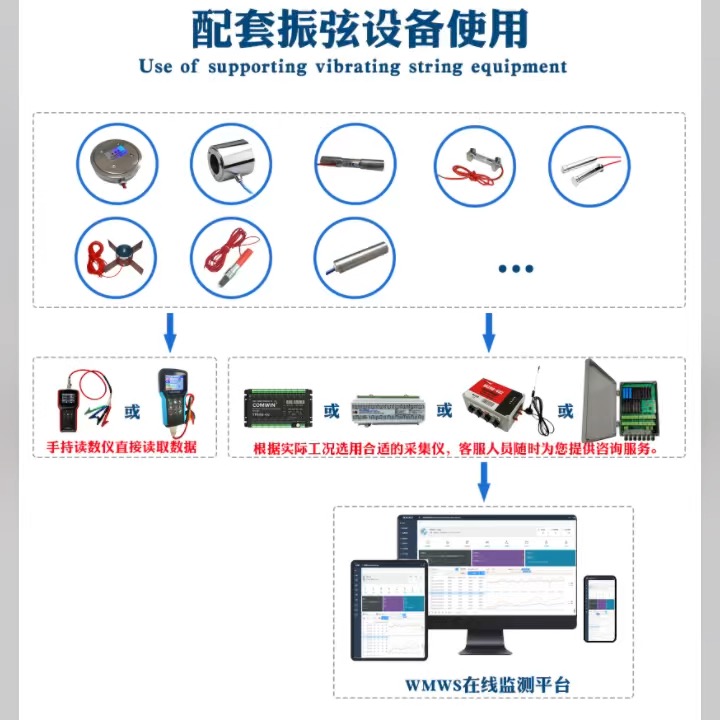
振弦式傳感器是目前應力、應變測量中較為先進的傳感器之一。振弦式傳感器的輸出是頻率信號,信號處理過程中無須進行A/D及D/A轉換,因此,抗干擾能力強,信號傳輸距離遠,而且對傳輸電纜要求低。另外,振弦式傳感器還具有結構簡單、精度高、壽命長等特點, 因而一直受到工程界的關注。在工程應用中,振弦式傳感器可以埋入或焊接在被測試件上,基本不存在粘貼劑老化和脫落問題,具有很好的穩定性和重復性。對于微小的被測力變化可產生較大的頻率變化,具有很高的靈敏度。
隨著現代電子讀數儀技術、材料及生產工藝的發展,振弦式儀器技術也不斷得以完善,成為新一代工程儀器的潮流,被廣泛應用在建筑物基礎、大壩、橋梁、公路、核電站的水泥外殼等需要對受力、位移、微裂縫的測量中,還可以作為電子秤、皮帶秤、汽車秤等的關鍵傳感器。為了準確測量應力、應變的變化,除了要研究振弦式傳感器的材料特性外,還必須解決振弦傳感器的激振和測頻讀數技術。
1 傳統的間歇激振方法
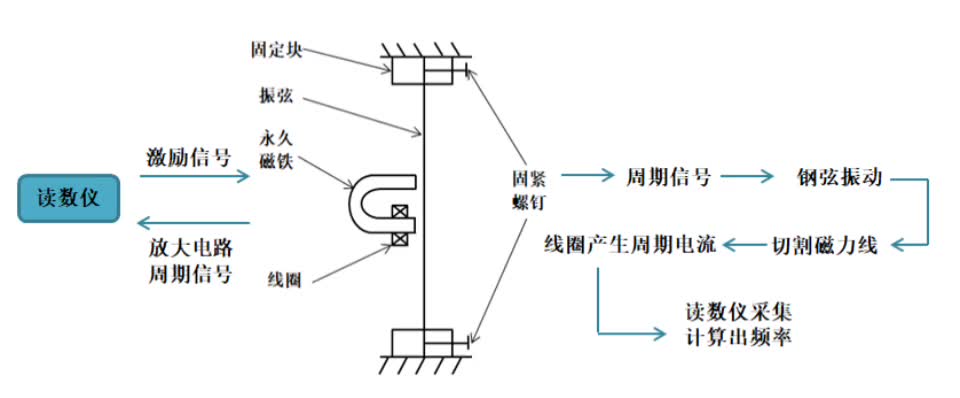
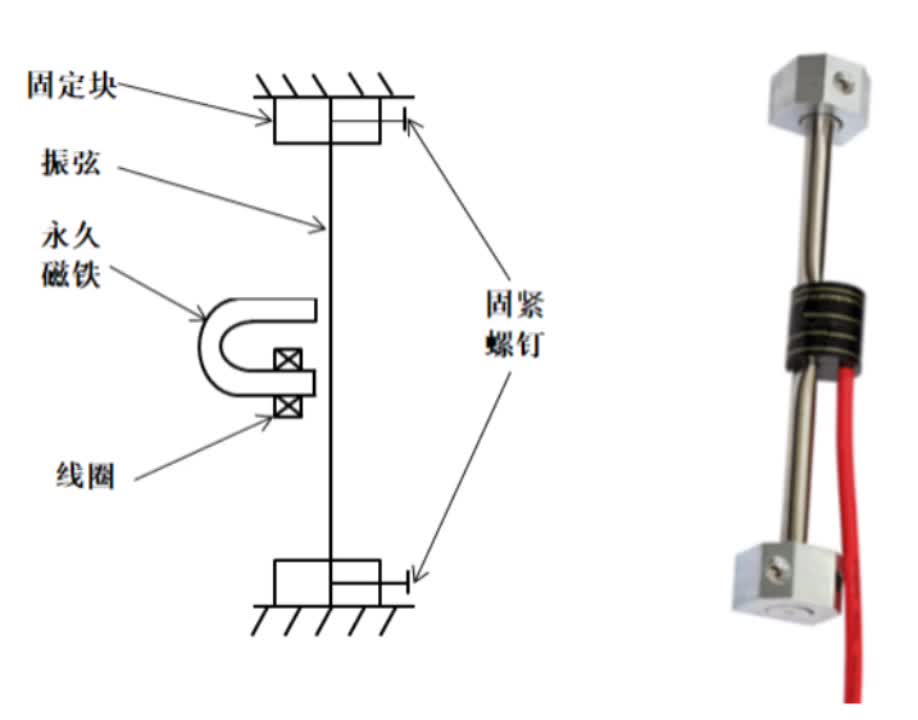
為了測量出振弦的固有頻率,必須設法激發弦振動。激發弦振動的方式一般有2種:(1)連續激振方式。這種方式又分為電流法和電磁法,在電流法中,振弦作為振蕩器的一部分,振弦中通過電流,所以必須考慮振弦與外殼的絕緣問題。若絕緣材料與振弦熱膨脹系數差別大,則易產生溫差,影響測量精度,連續激振容易使振弦疲勞。(2)間歇激振方式。如圖1所示,振弦上裝有一塊小純鐵片,旁邊放置電磁鐵,當電磁鐵線圈通入脈動電流i后,電磁鐵的磁性大大增強,從而吸住小鐵片(振弦);當線圈中無電流流過,電磁鐵就釋放振弦。如此循環激振,弦就產生振動。要維持弦持續振動,就應不斷地激發振弦。即電磁鐵每隔一定時間通過一次脈沖電流,使電磁鐵定時地吸引振弦,故須在電磁鐵的線圈通以一定周期的脈沖電流。當停止激振時,由于慣性的作用,振弦繼續做阻尼振動,電磁鐵線圈中產生感應電動勢,感應電動勢的頻率與弦的阻尼振動頻率相等。這樣可由輸出電勢的頻率測得振弦的固有振動頻率。

這種間歇式激振電路復雜,通常由張馳振蕩器、電磁繼電器、電源等部分組成。電磁繼電器的體積大、功耗大、機械觸點工作可靠性欠佳,振蕩器的振蕩頻率調節范圍不大,并且調節不能在線自動實現,從而使振弦起振有時較困難[2]。當要同時監測多路振弦傳感器時,電路變得更加復雜。更為嚴重的是繼電器驅動的激振線圈是感性負載,在間歇激振時產生較大的電磁干擾,影響了監測精度,對其他電路的正常工作造成干擾。為解決這些問題,對于多路振弦傳感器的掃頻激振采用時分復用方法。即多路傳感器共用一個掃頻信號源,當要巡檢某路傳感器時,由選擇開關將掃頻信號源與此路傳感器接通;用MOS FET繼電器替代電磁繼電器。這樣,不但簡化了電路,而且很好地解決了電磁干擾問題。
2 掃頻激振原理及電路設計
2.1 掃頻激振原理
掃頻激振技術是用一串連續變化的頻率信號掃頻輸出去激振振弦傳感器的激振線圈。當信號的頻率和振弦的固有頻率相近時,振弦能迅速達到共振狀態,從而可靠起振。振弦起振后,其在線圈中產生的感應電勢的頻率即是振弦的固有頻率。由于激振信號的頻率用軟件控制方便,所以只要知道振弦固有頻率的大致范圍(通常對一種已知傳感器固有頻率的大致范圍是確定的),就可用這個頻率附近的激振信號去激發它,使振弦很快起振。
2.2 掃頻激振電路的設計
相比其他系列單片機,PIC系列單片機開發環境優越,精簡的指令集和單字節指令使其執行效率高[3]。芯片內部自帶看門狗定時器、A/D轉換器、比較模塊、USART異步串口通信模塊、EEPROM存儲器,從而精簡了電路設計,降低了成本。由于可以設置睡眠和低功耗模式,減少了電路的功耗,提高了電路的可靠性。基于PIC16F873A的多路振弦傳感器的掃頻激振的硬件電路如圖2所示。整個硬件電路分為中央控制器、掃頻激振電路、顯示模塊、參數輸入模塊、等精度測頻模塊、RS485通信模塊等部分。
一般的單線圈振弦式傳感器的固有頻率范圍是400 Hz~4 500 Hz之間,其輸出頻率隨所受壓力的變化而變化。若掃頻信號的頻率范圍是400 Hz~4 500 Hz,需要掃頻的時間長、激振效果差、可控性差。為了減少掃頻時間,提高測量速度,根據振弦傳感器的輸出頻率范圍設置不同的掃頻頻段。其方法是:由參數輸入電路輸入掃頻信號頻率的上限值fmax和下限值fmin,以及相鄰2個掃頻信號頻率的差值Δf,這些參數存儲在單片機的片內EEPROM中。這樣,輸出的掃頻信號很有針對性,輸出的激振頻率可控性好。這些正是該掃頻激振技術的突出優點。
對于多通道振弦傳感器的選擇和隔離是通過金屬化場效應管(MOSFET)固態繼電器實現的。當選擇某一路傳感器時,其對應的MOSFET固態繼電器導通,而其他路的MOSFET固態繼電器截止。雖然其他路傳感器的激振線圈通過MOSFET接在恒流激振電路的輸出端,但是MOSFET截止時的漏電流極小,處于高阻態,因而不會對所選通路造成影響。另外,選通電路和恒流驅動電路是光隔離的,從而避免了選通電路和恒流驅動電路相互影響,進一步提高了掃頻激振電路的可靠性。
根據振弦式傳感器的特性,當激振信號太強時,振弦會產生倍頻振動,由于倍頻成分的不同,使得同一傳感器獲得的頻率不同[4]。采用了恒流弱激振的方法,調整激振電流的大小,使其能可靠激振振弦傳感器的基頻,而又遠離倍頻。恒流激振的另一個優點是可以忽略傳感器引線電阻的影響。
3 掃頻激振的軟件設計
單片機PIC16F873A內帶有捕捉/比較模塊,用比較模式產生掃頻信號十分方便。當要輸出掃頻激振信號時,首先使選擇的通道號對應的MOSFET固態繼電器導通,而使其他通道的MOSFET固態繼電器截止處于高阻狀態;其次,將捕捉/比較模塊設置在比較模式下,把掃頻信號頻率的下限值fmin送到16 bit的比較數據寄存器中,清零定時器1的數據寄存器并啟動定時器1開始定時計數。這時,比較數據寄存器中的值不斷與定時器1數據寄存器的值比較,當兩者相等時產生一個比較中斷。在比較中斷子程序中主要完成以下任務:(1)掃頻信號輸出口電平反轉;(2)輸出掃頻信號的頻率增加一個步距Δf;(3)將輸出信號頻率與掃頻的上限頻率值fmax比較,當掃頻的頻率值高于上限頻率fmax時,停止掃頻輸出。用比較模式產生掃頻信號的比較中斷子程序框圖如圖3所示。
4 仿真結果
為了驗證掃頻激振電路的效果,選用美國基康公司的VK4100、VK4150型振弦傳感器,在WE-30萬能材料實驗機上對振弦傳感器進行模擬加載試驗,其測試數據如表1所示。表中“計算應變”、“計算頻率”是根據VK4100、VK4150的數學模型計算的值。通過對表1 數據的進一步分析可以看出,用該掃頻激振方法不但對同一振弦傳感器在不同受力狀態時測頻的相對誤差小,而且對不同振弦傳感器測頻的相對誤差也很小,實現了穩定的掃頻和可靠的激振。從表中還可以看出,實際測量的頻率值與理論值非常接近。
用單片機的比較輸出模式產生掃頻信號,省去了專用的掃頻信號發生器芯片,簡化了電路設計,提高了測量電路的可靠性,突破了傳統的儀表測量系統的設計方法。恒電流弱激振電路的應用,提高了振弦傳感器掃頻激振的可靠性和穩定性,避免了倍頻信號的產生。此種掃頻激振方法已成功地應用于某船舶應力監測系統中,使長期實時監測船舶的受力情況成為現實。不但為船舶的使用、維護和保養提供了充分的依據,也為船舶的設計、改進、制造提供了真實可靠的數據及較高的使用價值。這種測頻方法也可推廣到其他領域,如核電站外殼、建筑大壩等需要長期應力監測的場合,具有廣闊的應用前景。


































 工商網監
工商網監
評論