 電子發燒友App
電子發燒友App


隨著生產和科學的不斷發展,角度測量越來越廣泛的應用于工業科研等各領域,隨著技術水平和測量準確度也在不斷提高。市場對于傳感器的需求也是越來越大,單從定義上來看傾角傳感器是用來測量相對于水平面的傾角變化量,換句話說傾角傳感器其實是運用慣性原理的一種 加速度傳感器 。
根據基本的物理原理,在一個系統內部,速度是無法測量的,但卻可以測量其加速度。如果初速度已知,就可以通過積分算出線速度,進而可以計算出直線位移,所以它其實是運用慣性原理的一種加速度傳感器。
當傾角傳感器靜止時也就是側面和垂直方向沒有加速度作用,那么作用在它上面的只有重力加速度。重力垂直軸與加速度傳感器靈敏軸之間的夾角就是傾斜角了。
傾角傳感器經常用于系統的水平距離和物體的高度的測量,從工作原理上可分為固體擺式、液體擺式、氣體擺式三種傾角傳感器,這三種傾角傳感器都是利用地球萬有引力的作用,將傳感器敏感器件對大地的姿態角,即與大地引力的夾角 (傾角)這一物理量,轉換成模擬信號或脈沖信號。
固體擺式傾角傳感器
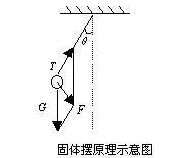
如圖所示,其由擺錘、擺線、支架組成,擺錘受重力G和擺拉力T的作用,其合外力
F =G sinθ=mg sinθ
式中的θ為擺線與垂直方向的夾角。在小角度范圍內測量時,可以認為F與θ成線性關系。如應變式傾角傳感器就是基于此原理。
液體擺式傾角傳感器
液體擺的結構原理是在玻璃殼體內裝有導電液,并有三根鉑電極和外部相連接,三根電極相互平行且間距相等,如圖所示。
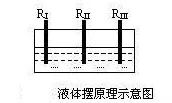
當殼體水平時,電極插入導電液的深度相同。如果在兩根電極之間加上幅值相等的交流電壓時,電極之間會形成離子電流,兩根電極之間的液體相當于兩個電阻RI和RIII。
若液體擺水平時,則RI=RIII。
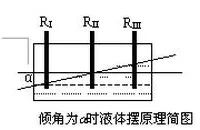
當玻璃殼體傾斜時,電極間的導電液不相等,三根電極浸入液體的深度也發生變化,但中間電極浸入深度基本保持不變。如圖所示,左邊電極浸入深度小,則導電液減少,導電的離子數減少,電阻RI增大,相對極則導電液增加,導電的離子數增加,而使電阻RIII 減少,即RI>RIII。反之,若傾斜方向相反,則RI<RIII。
在液體擺的應用中也有根據液體位置變化引起應變片的變化,從而引起輸出電信號變化而感知傾角的變化。在實用中除此類型外,還有在電解質溶液中留下一氣泡,當裝置傾斜時氣泡會運動使電容發生變化而感應出傾角的“液體擺”。
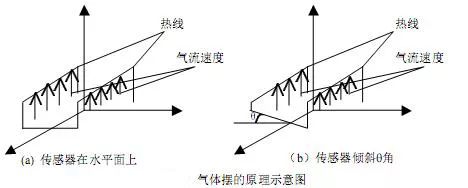
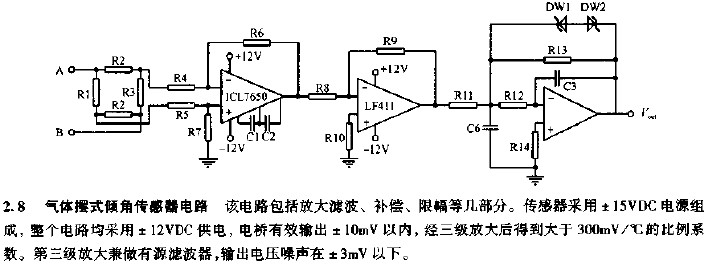
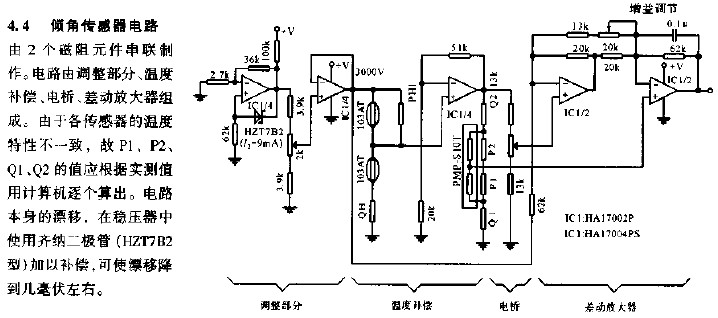
氣體擺式傾角傳感器
“氣體擺”式慣性元件由密閉腔體、氣體和熱線組成,當腔體所在平面相對水平面傾斜或腔體受到加速度的作用時,熱線的阻值發生變化,并且熱線阻值的變化是角度q或加速度的函數,因而也具有擺的效應。其中熱線阻值的變化是氣體與熱線之間的能量交換引起的。
“氣體擺”式慣性器件的敏感機理基于密閉腔體中的能量傳遞,在密閉腔體中有氣體和熱線,熱線是唯一的熱源。當裝置通電時,對氣體加熱。在熱線能量交換中對流是主要形式。
對流傳熱的方程為:

其中:h—熱量傳遞系數(w/m2×k),s—熱線表面積(m2),TH—熱線溫度(K),TA—氣體溫度(K)。
熱量傳遞系數h與流體的熱傳導率、動力學粘度、流體速度和熱線直徑有關,表示為:
其中:Nu為—努塞爾(Nusselt)數,l—熱傳導率(W/mK),Re—雷諾(Reynold)數,U—流體速度(m2/s),D—熱線的直徑(m),n—流體的動力學粘度。
當氣流以速度U垂直穿過熱線時,

將(4)式代入(3)式得:
根據熱平衡方程可得:
所以:
假設和s為常數,則有:
從式(7)可以看出,當流體的動力學粘度、密度和熱傳導特性一定時,若熱線周圍流體的速度不同,則流過熱線的電流也不同,從而引起熱線兩端的電壓也產生相應的變化。氣體擺式慣性器件就是根據一原理研制的。
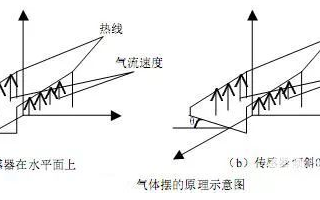
氣體擺式檢測器件的核心敏感元件為熱線。電流流過熱線,熱線產生熱量,使熱線保持一定的溫度。熱線的溫度高于它周圍氣體的溫度,動能增加,所以氣體向上流動。在平衡狀態時,如圖4(a)所示,熱線處于同一水平面上,上升氣流穿過它們的速度相同,即V1=V1′,這時,氣流對熱線的影響相同,由式(7)可知,流過熱線的電流也相同,電橋平衡。當密閉腔體傾斜時,熱線相對水平面的高度發生了變化,如圖4(b)所示,因為密閉腔體中氣體的流動是連續的,所以熱氣流在向上運動的過程中,依次經過下部和上部的熱線。若忽略氣體上升過程中克服重力的能量損失,則穿過上部熱線的氣流已經與下部熱線的產生熱交換,使穿過兩根熱線時的氣流速度不同,這時V2¢>V2,因此流過兩根熱線的電流也會發生相應的變化,所以電橋失去平衡,輸出一個電信號。傾斜角度不同,輸出的電信號也不同。
固、液、氣體擺性能比較
就基于固體擺、液體擺及氣體擺原理研制的傾角傳感器而言,它們各有所長。在重力場中,固體擺的敏感質量是擺錘質量,液體擺的敏感質量是電解液,而氣體擺的敏感質量是氣體。
氣體是密封腔體內的唯一運動體,它的質量較小,在大沖擊或高過載時產生的慣性力也很小,所以具有較強的抗振動或沖擊能力。但氣體運動控制較為復雜,影響其運動的因素較多,其精度無法達到軍用武器系統的要求。
固體擺傾角傳感器有明確的擺長和擺心,其機理基本上與加速度傳感器相同。在實用中產品類型較多如電磁擺式,其產品測量范圍、精度及抗過載能力較高,在武器系統中應用也較為廣泛。
液體擺傾角傳感器介于兩者之間,但系統穩定,在高精度系統中,應用較為廣泛,且國內外產品多為此類。
傾角傳感器的應用
傾角傳感器用于各種測量角度的應用中。例如,高精度激光儀器水平、工程機械設備調平、遠距離測距儀器、高空平臺安全保護、定向衛星通訊天線的俯仰角測量、 船舶航行姿態測量、盾構頂管應用、大壩檢測、地質設備傾斜監測、火炮炮管初射角度測量、雷達車輛平臺檢測、衛星通訊車姿態檢測等等。
海事地理
山體滑坡,雪崩——雙軸傾角傳感器配合液位傳感器用于山體滑坡或雪崩監測,通過無線傳感系統將數據傳輸到中央控制系統,實時監測山體狀態,可以有效減小山體滑坡帶來的損失。
建筑工程
高層建筑安全監測——目前世界上摩天大樓越來越多,為了監測大樓的安全性能,可以應用高精度的伺服傾角傳感器,該系列傾角傳感器可以感應微小角度的變化,可以用于大樓擺幅、震動、傾斜等監測。
水庫大壩
大壩安全監測——大壩垮塌事故已經發生多次,為了及時發出預警信號,減少財產損失,通過傾角傳感器的監測、觀測儀器和設備,以及時取得反映大壩和基巖性態 變化以及環境對大壩作用的各種數據的觀測和資料處理等工作。其目的是分析估計大壩的安全程度,以便及時采取措施,設法保證大壩安全運行。
挖掘機械
挖掘機——為了實現挖掘機的三維空間定位,在安裝工作裝置各關節角度傳感器的基礎上,又安裝平臺回轉角度檢測裝置和平臺傾角傳感器,并在斗桿上安裝激光接 收儀用于檢測地面激光發射器發射的水平機關相對于接收儀零位的高度。建立挖掘機的運動學模式,推導車體相對于大地的坐標變換矩陣,即完成三維空間的車體定 位,并得到常用簡單的車體高程定位公式,實現挖掘機挖掘軌跡的三維空間定位為實現挖掘機的三維空間軌跡精確與挖掘機深度控制打下基礎。
現代汽車
汽車四輪定位——隨著電子技術的發展和應用,汽車的安全性、舒適性和智能性越來越高。汽車側向傾斜角度傳感器的應用是防止汽車在行駛中發生傾翻事故的一種 有效方法。是提高汽車安全性的重要措施,特別是越野車。雙層客車等重心較高的汽車更有必要性。汽車傾翻的實質是:行駛中向外的傾翻力矩大于向里的穩定力 矩,當重心高度一定時,傾斜力矩油傾翻力(向外的側向力)決定。
機器人——近年來機器人技術發展很快,歐美等工業發達國家早就開始對各種機器人進行系統的研究,隨著科技的進步和時間的推移,取得了大量的研究成果。我們知道機器人上應用了大量的傳感器,其中傾角傳感器可以實時監測機器人的狀態。
鐵路鐵軌
軌檢儀:目前的軌道測量方式智能程度差,測量精度低,操作時間長,迫切需要設計一種適用于一般使用的便攜式智能化軌道檢測儀傾角傳感器用于軌檢儀,用于實時檢測鐵道的傾斜度和高度差。
輸電線塔
輸電線鐵塔傾斜智能監測——輸電線鐵塔的倒塌事件時有發生,一旦發生倒塌,將會造成巨大的損失,傾角傳感器應用于輸電線鐵塔傾斜角度監測,可以實時監測輸電線傾斜角度,一旦因為大風等自然災害導致傾斜角度過大,實時發出預警信號,由工作人員維修減少損失。
平臺控制
船載水平平臺——傾角傳感器在船載水平平臺上應用,用于船載衛星跟蹤天線的底座,以保持天線始終處于水平狀態,對平臺進行實時控制,可以隔離船體的俯仰和橫滾運動,使平臺處于水平。
太陽能
太陽能——太陽能是一種清潔的能源,它的應用正在世紀范圍內普遍的增長,利用太陽能發電就是一個使用太陽能的方式,因此為了得到充足的利用太陽能,如何選擇太陽能電池方位角與傾斜角是一個重要的問題,利用傾角傳感器調整角度,將太陽能的利用率進一步提高。
審核編輯 :李倩
?













 工商網監
工商網監
評論