供電。目前市面上所有多線(xiàn)激光雷達(dá)都是電滑環(huán),壽命幾千小時(shí)。即使360°雷達(dá)用了光磁技術(shù),相比270°雷達(dá),因負(fù)載重、質(zhì)心沒(méi)有后者穩(wěn)定,也會(huì)導(dǎo)致電機(jī)壽命短于后者。還有激光器的壽命,三角相位激光器連續(xù)壽命
2018-11-09 19:49:16
SMARC/Qseven/Apalis對(duì)比分析哪個(gè)好?
2021-04-20 06:01:26
最新在學(xué)習(xí)PWM電流跟蹤這塊,有個(gè)在APF中常用的三角波比較法PWM跟蹤算法,我的程序思路是設(shè)置2812計(jì)數(shù)器增減計(jì)數(shù),上溢中斷和下溢中斷,在中斷中采樣輸出電流,然后和電流指令信號(hào)比較,經(jīng)PI控制器
2015-09-25 15:02:04
在labview中用for循環(huán)怎么生成三角波形。。。。。。
2013-03-31 15:36:12
如何測(cè)量三角波的占空比,有什么方案可以把三角波的占空比轉(zhuǎn)換成方波的占空比?
2014-07-25 22:49:36
誰(shuí)知道這三角符號(hào)是干嘛用的???突然蒙了~~
2016-07-21 22:23:25
可是直觀看到測(cè)量波形;優(yōu)勢(shì)三:高頻率,儀表波束角小,抗干擾能力強(qiáng),測(cè)量的穩(wěn)定性及可靠性高;優(yōu)勢(shì)四:調(diào)頻技術(shù);優(yōu)勢(shì)五:連接方便;優(yōu)勢(shì)六:應(yīng)用范圍廣;定華電子DHE-RD雷達(dá)物位計(jì)可以適用于不同類(lèi)型的工況
2020-11-06 09:01:38
雷達(dá)物位計(jì)的測(cè)量原理雷達(dá)物位計(jì)的特點(diǎn)雷達(dá)物位計(jì)的安裝、使用
2021-03-18 07:37:13
信號(hào)進(jìn)行分析。從信號(hào)形式上區(qū)分,雷達(dá)信號(hào)主要有連續(xù)波雷達(dá)和脈沖雷達(dá)等形式,而目前絕大多數(shù)雷達(dá)都采用脈沖信號(hào)的形式。為此R&S 公司推出了一系列可以模擬脈沖雷達(dá)信號(hào)產(chǎn)生和分析脈沖雷達(dá)信號(hào)的測(cè)試與測(cè)量?jī)x器。圖1: 脈沖調(diào)制信號(hào)
2019-06-06 06:24:41
ARM/DSP/FPGA的區(qū)別是什么?對(duì)比分析哪個(gè)好?
2021-11-05 06:08:20
ARM與單片機(jī)對(duì)比分析哪個(gè)好?
2021-11-05 07:16:04
CPLD與FPGA對(duì)比分析哪個(gè)好?
2021-06-21 06:10:12
CPLD與FPGA的對(duì)比分析哪個(gè)好?
2021-11-05 08:20:40
RAM有哪些分類(lèi)?特點(diǎn)是什么?DRAM和SRAM對(duì)比分析哪個(gè)好?
2022-01-20 07:16:10
DSP、MCU、ARM、CPLD/FPGA對(duì)比分析哪個(gè)好?
2021-10-22 07:17:10
仿真軟件中電磁場(chǎng)怎么計(jì)算?EM仿真和schmetic仿真對(duì)比分析哪個(gè)好?
2021-09-30 06:50:03
FMCW激光雷達(dá)與dTOF激光雷達(dá)的區(qū)別在哪?
2021-07-23 13:22:37
IPTV技術(shù)分析及與數(shù)字電視對(duì)比分析哪個(gè)好?
2021-05-26 06:14:01
LTE與WiMAX對(duì)比分析哪個(gè)好?
2021-05-31 06:22:29
LeonardoSpectrum Level 3Synplify 6.0 以及 Synopsys Express 3.4三種綜合工具對(duì)比分析,哪個(gè)好?
2021-05-06 06:08:27
需要用到atan2和asin函數(shù),include了math.h后報(bào)錯(cuò)函數(shù)不存在;和keil下的math文件內(nèi)容對(duì)比了一下發(fā)現(xiàn)確實(shí)少了三角函數(shù)的申明,為什么會(huì)存在這種差異?該如何進(jìn)行三角函數(shù)計(jì)算?
2022-06-01 06:18:04
Arduino和STM32各自的特點(diǎn)是什么?STM32和Arduino對(duì)比分析哪個(gè)好?
2021-11-04 06:34:07
TOF 方案激光雷達(dá)是激光雷達(dá)新一代技術(shù)方案,本產(chǎn)品解決了如市場(chǎng)三角測(cè)試法等產(chǎn)品組裝問(wèn)題難,價(jià)格成本高等問(wèn)題,目前提供面陣及單光子技術(shù),基于COM產(chǎn)品。集成了SPAD,TDC,DSP,RAM
2019-06-07 00:03:35
eFuse與傳統(tǒng)保險(xiǎn)絲對(duì)比分析eFuse應(yīng)對(duì)云應(yīng)用過(guò)流保護(hù)的挑戰(zhàn)
2021-03-09 07:10:27
這個(gè)電路是三角波產(chǎn)生電路,但為什么示波器顯示的輸出波形方波和三角波都沒(méi)有?
2017-12-30 23:28:00
saber三角波發(fā)生電路,我一增大穩(wěn)壓管的穩(wěn)壓值,就沒(méi)有三角波了,運(yùn)放用的±15V供電,穩(wěn)壓管一設(shè)置到15V就沒(méi)了波形,求教
2018-09-09 23:31:57
NFR24C0中文使用手冊(cè)分享stm32硬件SPI與模擬SPI對(duì)比分析哪個(gè)好?
2021-12-17 07:40:48
來(lái)說(shuō)同樣重要,并且對(duì)于三角測(cè)距激光雷達(dá)而言,也更具有挑戰(zhàn)。 由于測(cè)量原理的關(guān)系,雖然一般在10米以?xún)?nèi)都可以實(shí)現(xiàn)很高的測(cè)距分辨率,但其分辨率亦會(huì)隨著探測(cè)物體距離增加而劇烈下降。 因此,為了實(shí)現(xiàn)更遠(yuǎn)
2018-02-02 14:06:27
串行和并行接口SRAM對(duì)比分析,看完你就懂了
2021-05-19 06:16:24
主流的三種RF方案及其優(yōu)缺點(diǎn)對(duì)比分析RF IC的主要性能是什么?
2021-05-25 06:34:17
請(qǐng)教有經(jīng)驗(yàn)的射頻工程師,采用DDS+PLL的方式設(shè)計(jì)雷達(dá)發(fā)射源,要求發(fā)射信號(hào)為26GHz單頻連續(xù)波信號(hào)以及三角形LFMCW信號(hào),25.5GHz~26.5GHz,調(diào)制周期2ms,通過(guò)單片機(jī)控制波形切換,請(qǐng)推薦DDS和PLL芯片型號(hào),以及晶振的選擇,十分感謝
2018-10-09 17:39:06
我在用555產(chǎn)生方波后經(jīng)過(guò)74ls74分頻,再經(jīng)過(guò)324積分電路產(chǎn)生三角波 但是三角波不能無(wú)法產(chǎn)生 求大神看看電路幫忙
2017-07-01 14:05:19
步進(jìn)電機(jī)與伺服電機(jī)的工作原理是什么?單/雙極性步進(jìn)電機(jī)對(duì)比分析哪個(gè)好?步進(jìn)電機(jī)有哪些基本參數(shù)?
2021-09-24 08:08:37
【作者】:崔鶴;魏彥玉;曹銳;宮玉彬;王文祥;【來(lái)源】:《雷達(dá)科學(xué)與技術(shù)》2010年01期【摘要】:雙模微帶諧振器用于微波濾波器設(shè)計(jì)時(shí)具有獨(dú)特的優(yōu)點(diǎn)。近年來(lái)出現(xiàn)了一些由雙模微帶三角形貼片諧振器
2010-04-22 11:36:31
。本章節(jié)將會(huì)基于AWR1642介紹適用于角雷達(dá)的短程雷達(dá)解決方案。由于系統(tǒng)的框圖跟之前的道閘雷達(dá)大同小異,主要的區(qū)別在于三點(diǎn),一是雷達(dá)芯片使用的是AWR1642…
2022-11-07 08:07:09
及功能得到了廣泛的應(yīng)用。 本研究中雷達(dá)模塊采用雷達(dá)ⅣS.148,利用集成電路產(chǎn)生三角波,驅(qū)動(dòng)其發(fā)射信號(hào)。在處理雷達(dá)混頻輸出信號(hào)時(shí),利用芯片ADS7890進(jìn)行對(duì)其進(jìn)行快速模/數(shù)轉(zhuǎn)換ADS7890模數(shù)轉(zhuǎn)換
2021-12-27 17:08:50
前言隨著雷達(dá)技術(shù)的發(fā)展,雷達(dá)的任務(wù)不僅是測(cè)量目標(biāo)的距離、方位和仰角,而且還包括測(cè)量目標(biāo)速度,以及從目標(biāo)回波中獲取更多有關(guān)目標(biāo)的信息。雷達(dá)是利用目標(biāo)對(duì)電磁波的發(fā)射(或稱(chēng)為二次散射)現(xiàn)象來(lái)發(fā)現(xiàn)目標(biāo)并測(cè)定
2019-07-19 06:34:48
雷達(dá)散射截面是目標(biāo)物體在雷達(dá)接收機(jī)方向上反射雷達(dá)信號(hào)能力的一種表示方式,其定義為在一個(gè)給定方向上的單位角弧度內(nèi)目標(biāo)物體散射功率與注入目標(biāo)物體的功率密度之比。本文主要涉及怎樣使用安立公司高性能
2019-06-06 06:30:15
我想用NE555觸發(fā)器產(chǎn)生方波,然后再積分,是否能產(chǎn)生三角波,且三角波的頻率如何計(jì)算,我想用150k的三角波做載波頻率,懇請(qǐng)各位大神幫忙指點(diǎn)一下!謝謝
2014-02-16 17:03:17
萌新,請(qǐng)教一下各位大佬。導(dǎo)波雷達(dá)物位計(jì)與雷達(dá)物位計(jì)的主要區(qū)別是什么?
2021-04-23 09:21:47
常見(jiàn)單片機(jī)對(duì)比分析哪個(gè)好?
2021-10-29 07:39:21
開(kāi)關(guān)電源PWM與PFM對(duì)比分析開(kāi)關(guān)電源控制技術(shù)的特點(diǎn)是什么
2021-03-11 07:37:37
異步通信與同步通信對(duì)比分析哪個(gè)好?
2021-12-16 07:35:06
隨時(shí)間按照三角波規(guī)律變化。雷達(dá)接收的回波的頻率與發(fā)射的頻率變化規(guī)律相同,都是三角波規(guī)律,只是有一個(gè)時(shí)間差,利用這個(gè)微小的時(shí)間差可計(jì)算出目標(biāo)距離。微波雷達(dá)傳感器具有體積小、易集成和空間分辨率高的特點(diǎn)
2021-09-23 16:47:18
怎么產(chǎn)生高頻的三角波啊?貌似積分速度跟不上
2011-03-20 22:38:29
怎樣用matlab對(duì)三角波和方波進(jìn)行頻譜分析呢?求高手幫助謝謝
2011-11-19 23:23:47
智能化安防的需要。通過(guò)毫米波雷達(dá)感應(yīng)模塊探測(cè)與視頻分析相結(jié)合的技術(shù),對(duì)非法進(jìn)入監(jiān)控區(qū)域的目標(biāo)進(jìn)行監(jiān)測(cè)、分析和跟蹤,實(shí)現(xiàn)周界區(qū)域內(nèi)的事件預(yù)警和精確防控。安防初始的概念是建立圍欄,這個(gè)概念逐漸演變成
2021-09-15 17:20:31
問(wèn)題,就是:給了機(jī)器人一雙“眼睛”。 通過(guò)激光雷達(dá),機(jī)器人可以向外界發(fā)射紅外線(xiàn)光源,通過(guò)三角測(cè)距或者TOF成像原理對(duì)機(jī)器人進(jìn)行定位,幫助機(jī)器人構(gòu)建所在環(huán)境的高精度輪廓信息,輔助機(jī)器人。 通過(guò)觀察這對(duì)CP
2019-02-15 15:12:28
步進(jìn)電機(jī)與伺服電機(jī)對(duì)比分析采用閉環(huán)技術(shù)的步進(jìn)電機(jī)
2021-02-05 06:05:47
步進(jìn)電機(jī)和伺服電機(jī)對(duì)比分析哪個(gè)好?
2021-10-13 08:15:46
。工作原理圖如下圖一所示。 圖一:雷達(dá)工作原理1)雷達(dá)測(cè)距測(cè)速原理毫米波雷達(dá)通過(guò)天線(xiàn)向外發(fā)射調(diào)頻連續(xù)波(三角波),接收目標(biāo)反射信號(hào)如圖二,與本頻發(fā)射頻率混頻出中頻信號(hào) IF,對(duì)中頻信號(hào) IF 處理,從而
2019-12-16 11:11:22
、緊急剎車(chē)、車(chē)距保持等功能。 綜述根據(jù)上面的介紹進(jìn)行簡(jiǎn)單的總結(jié),三種雷達(dá)各自的特點(diǎn)及優(yōu)劣勢(shì)如下: 制式參數(shù)超聲波雷達(dá) 激光雷達(dá)毫米波雷達(dá) 最大距離近遠(yuǎn)較遠(yuǎn)距離、角度分辨率一般 很高 高環(huán)境適應(yīng)性易受
2019-09-19 09:05:02
目標(biāo)相對(duì)于雷達(dá)的運(yùn)動(dòng)速度等信息。FMCW雷達(dá)傳感器,發(fā)射波為調(diào)頻連續(xù)波,其頻率隨時(shí)間按照三角波規(guī)律變化。雷達(dá)接收的回波的頻率與發(fā)射的頻率變化規(guī)律相同,都是三角波規(guī)律,只是有一個(gè)時(shí)間差,利用這個(gè)微小
2021-09-22 16:17:32
束角幅度,從而減少由于不需要的反射所引起的誤動(dòng)作和干擾,另一方面由于多普勒頻移大,相對(duì)速度的測(cè)量精度高。在汽車(chē)主動(dòng)安全領(lǐng)域,汽車(chē)微波/毫米波雷達(dá)傳感器因?yàn)槟軌蛉旌蚬ぷ鳎皇芄饩€(xiàn)、霧霾、沙塵暴等惡劣
2018-08-04 09:16:48
最近在看毫米波雷達(dá)的東西,發(fā)現(xiàn)所有的介紹都是計(jì)算相對(duì)速度與距離,對(duì)于目標(biāo)的方位角計(jì)算找了很久都沒(méi)有找到,有知道的普及一下,謝謝~~~~~
2016-11-23 20:25:29
算法復(fù)雜度低,降低了硬件成本。Tesla的這幾組線(xiàn)性調(diào)頻信號(hào)構(gòu)成了類(lèi)似三角波的線(xiàn)性調(diào)頻掃描方式,每個(gè)周期都有正、負(fù)調(diào)頻斜率兩部分,因此與傳統(tǒng)防撞雷達(dá)的線(xiàn)性調(diào)頻連續(xù)波(FMCW)信號(hào)相比具有不同的特點(diǎn)
2018-09-03 11:38:25
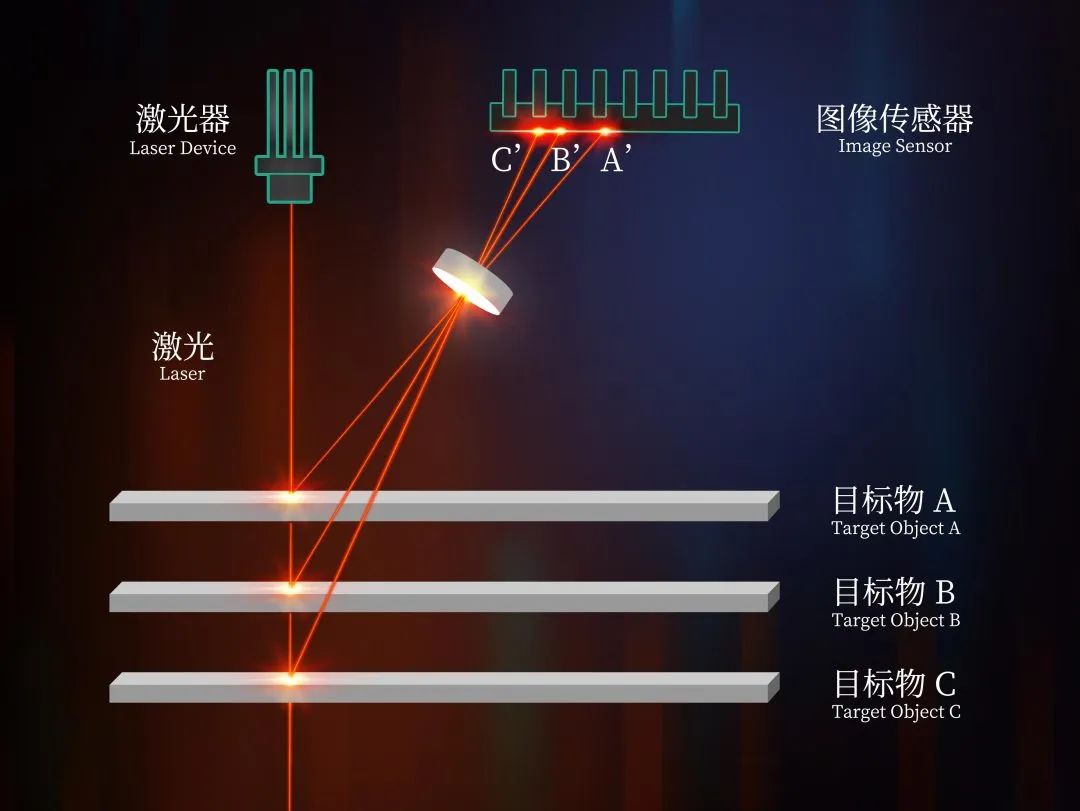
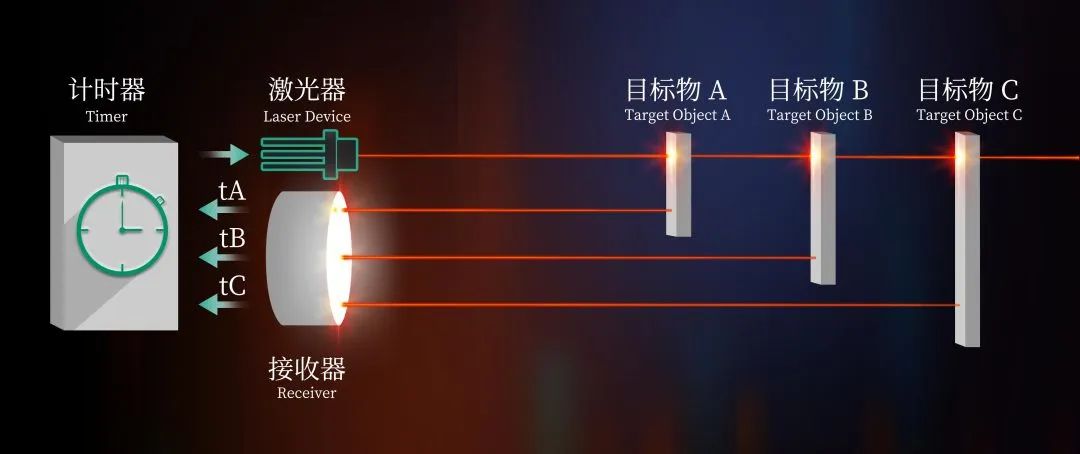
的時(shí)間差,然而我們都知道光速具有不變性,再將時(shí)間差乘以光速就可以得到目標(biāo)物體的距離。2.還有另一種全新的測(cè)量方法——三角測(cè)距法。像我們能聽(tīng)到的connect的體感攝像頭,還有Intel研發(fā)的RealSense都會(huì)使用到三角測(cè)距法。這種方式本質(zhì)上來(lái)說(shuō)是一種基于圖像處理的方法。
2017-09-19 15:51:15
來(lái)說(shuō)同樣重要,并且對(duì)于三角測(cè)距激光雷達(dá)而言,也更具有挑戰(zhàn)。 由于測(cè)量原理的關(guān)系,雖然一般在10米以?xún)?nèi)都可以實(shí)現(xiàn)很高的測(cè)距分辨率,但其分辨率亦會(huì)隨著探測(cè)物體距離增加而劇烈下降。 因此,為了實(shí)現(xiàn)更遠(yuǎn)
2018-02-07 13:40:27
珠三角還有什么電子組裝大賽么?要給信息管理畢業(yè)的妹紙來(lái)做電子行業(yè)統(tǒng)計(jì)分析 好愁苦。
2013-07-16 01:10:20
iphone12這個(gè)亮點(diǎn)不在5G上面,畢竟國(guó)內(nèi)的一些廠商早就已配備,也不在顏色,重點(diǎn)在于配備了一顆激光雷達(dá)!先說(shuō)一下這個(gè)激光雷達(dá)帶來(lái)的用途,最直接的就是能夠快速精準(zhǔn)對(duì)焦,即使在晚上也能夠很好實(shí)現(xiàn)
2021-07-22 09:12:51
監(jiān)控圖象傳輸方式對(duì)比分析
2012-08-20 12:53:09
的三倍且相等,從而得出:R DELTA= 3 * R STAR星–三角洲2號(hào)范例將下面的星形電阻網(wǎng)絡(luò)轉(zhuǎn)換為等效的三角洲網(wǎng)絡(luò)。這兩個(gè)星三角變換和三角星型轉(zhuǎn)換允許我們一種類(lèi)型的電路連接的轉(zhuǎn)換成另一種類(lèi)型,以便我們能夠輕松地分析電路。對(duì)于包含電阻或阻抗的星形或三角形電路,這些轉(zhuǎn)換技術(shù)都可以很好地使用。
2020-10-23 08:02:45
間按照三角波規(guī)律變化。雷達(dá)接收的回波的頻率與發(fā)射的頻率變化規(guī)律相同,都是三角波規(guī)律,只是有一個(gè)時(shí)間差,利用這個(gè)微小的時(shí)間差可計(jì)算出目標(biāo)距離。通過(guò)給目標(biāo)連續(xù)發(fā)送毫米波信號(hào),然后用傳感器接收從物體返回
2021-10-27 15:46:03
,通過(guò)多個(gè)激光發(fā)射器達(dá)到實(shí)時(shí)環(huán)境感知的目的。這種激光雷達(dá)屬于脈沖測(cè)距方式。相比三角測(cè)距方案,它的成本會(huì)要高得多,開(kāi)發(fā)難度也大。相對(duì)比掃地機(jī)器人中的激光雷達(dá),掃地機(jī)器人采用的激光雷達(dá)測(cè)量距離近(15米內(nèi)
2018-09-10 14:21:58
這個(gè)藍(lán)牙三角定位是通過(guò)什么原理實(shí)現(xiàn)定位的
2023-10-09 06:58:15
視頻標(biāo)準(zhǔn)核心技術(shù)對(duì)比分析哪個(gè)好
2021-06-07 06:12:34
鉛酸電池和鋰電池對(duì)比分析哪個(gè)好?
2021-06-10 06:59:19
伺服電機(jī)具有哪些缺陷?閉環(huán)步進(jìn)電機(jī)與伺服電機(jī)對(duì)比分析哪個(gè)好?
2021-09-27 08:13:44
分析了雷達(dá)模擬機(jī)中的飛行模擬,構(gòu)造了具有高精確度和逼真度的航空器運(yùn)動(dòng)仿真模型。并將模擬仿真得到的航跡與相對(duì)應(yīng)的真實(shí)雷達(dá)目標(biāo)航跡進(jìn)行對(duì)比分析,提出了改進(jìn)方法,
2009-12-08 11:15:08 17
17
SPWM調(diào)制方法對(duì)比分析
摘要:對(duì)比分析了三種正弦波脈寬調(diào)制(SPWM)控制方法,指出各自的優(yōu)缺點(diǎn)及應(yīng)用,給出了一些數(shù)學(xué)
2009-07-06 13:33:51 12452
12452 
對(duì)網(wǎng)絡(luò)通信中的TCP單播、廣播和IP多播技術(shù)進(jìn)行對(duì)比分析,針對(duì)雷達(dá)終端內(nèi)部數(shù)據(jù)交換實(shí)時(shí)性要求高等特點(diǎn),指出IP多播技術(shù)對(duì)比TCP單播與廣播技術(shù)的優(yōu)點(diǎn),并對(duì)IP多播技術(shù)在VC環(huán)境下的
2011-09-09 10:24:4832 這里主要分析了MIMO雷達(dá)基于似然比的檢測(cè)性能。另外,這里也將MIMO雷達(dá)跟相控陣雷達(dá)的檢測(cè)性能做了對(duì)比,仿真結(jié)果表明MIMO雷達(dá)相比傳統(tǒng)雷達(dá)具有的優(yōu)異的檢測(cè)性能。
2012-01-11 15:42:1258 小型PLC對(duì)比分析.
2012-04-27 15:43:3471 我國(guó)即將建成由216部多普勒天氣雷達(dá)組成的觀測(cè)網(wǎng),組網(wǎng)雷達(dá)數(shù)據(jù)對(duì)比分析是及時(shí)發(fā)現(xiàn)雷達(dá)網(wǎng)故障、為雷達(dá)定標(biāo)提供參考,提高短時(shí)臨近天氣預(yù)報(bào)準(zhǔn)確率的基礎(chǔ)。為解決上述問(wèn)題,研發(fā)了雷達(dá)組網(wǎng)數(shù)據(jù)對(duì)比分析系統(tǒng)。首先
2018-02-12 14:44:210 如今,激光雷達(dá)已被廣泛應(yīng)用于機(jī)器人、無(wú)人駕駛、AR/VR、3D打印等多個(gè)領(lǐng)域,根據(jù)應(yīng)用領(lǐng)域的不同,激光雷達(dá)的類(lèi)型也存在一定差異,機(jī)器人是目前激光雷達(dá)應(yīng)用最為火熱的領(lǐng)域之一,按照不同的技術(shù)路線(xiàn),可將機(jī)器人激光雷達(dá)分為T(mén)OF激光雷達(dá)及三角測(cè)距激光雷達(dá)兩大類(lèi)型。
2020-12-26 09:27:153334 dToF(直接飛行時(shí)間)雷達(dá)的發(fā)展前景非常廣闊。
2023-07-31 09:22:071891 
為滿(mǎn)足客戶(hù)對(duì)激光雷達(dá)產(chǎn)品兼顧距離、高靈敏的性?xún)r(jià)雙優(yōu)需求,思嵐科技發(fā)揮在三角測(cè)距&DTOF測(cè)距上的技術(shù)優(yōu)勢(shì),推出新一代融合型DTOF雷達(dá)產(chǎn)品 — RPLIDAR C1。
2023-10-31 09:42:55325 
目前激光雷達(dá)的測(cè)量原理主要有脈沖法、相干法和三角法3種,脈沖法和相干光法對(duì)激光雷達(dá)的硬件要求高,但測(cè)量精度比激光三角法要高得多,故多用于軍事領(lǐng)域。而激光三角測(cè)距法因其成本低,精度滿(mǎn)足大部分商用及民用要求,故得到了廣泛關(guān)注。
2023-12-25 10:04:56189 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論