 電子發燒友App
電子發燒友App


壓力和溫度監測在嵌入式系統開發中是非常常見的需求,特別是對環境大氣壓力和溫度的檢測需求就更常見了。我們一般都會選擇一些封裝較小操作比較方便的壓力傳感器。BMP280就是滿足這一要求的器件。在這一篇中我們將設計并實現BMP280的驅動。
1 、功能概述
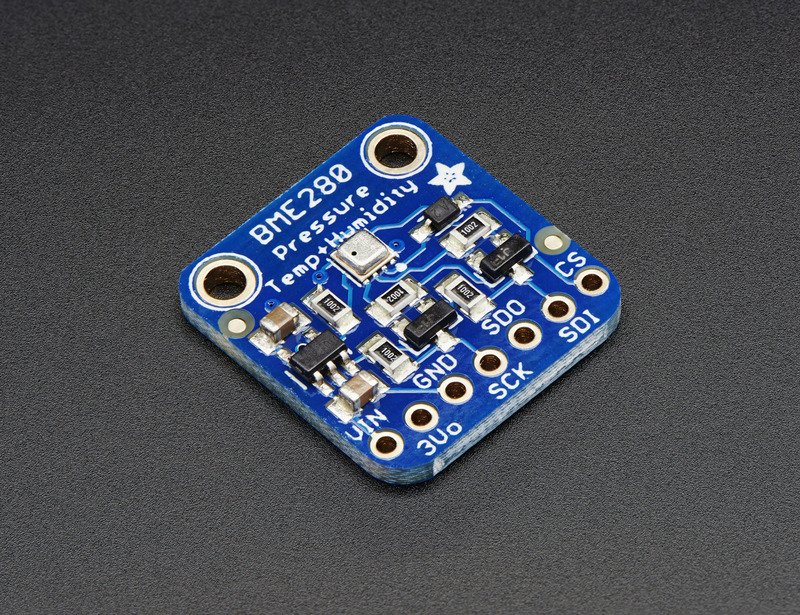
BMP280是一款絕對壓力傳感器產品。BMP280是一款絕對的氣壓傳感器,專為移動應用而設計。傳感器模塊采用極其緊湊的封裝。其小尺寸和低功耗允許在諸如移動電話,GPS模塊或手表的電池供電設備中實現。
1.1 、硬件接口
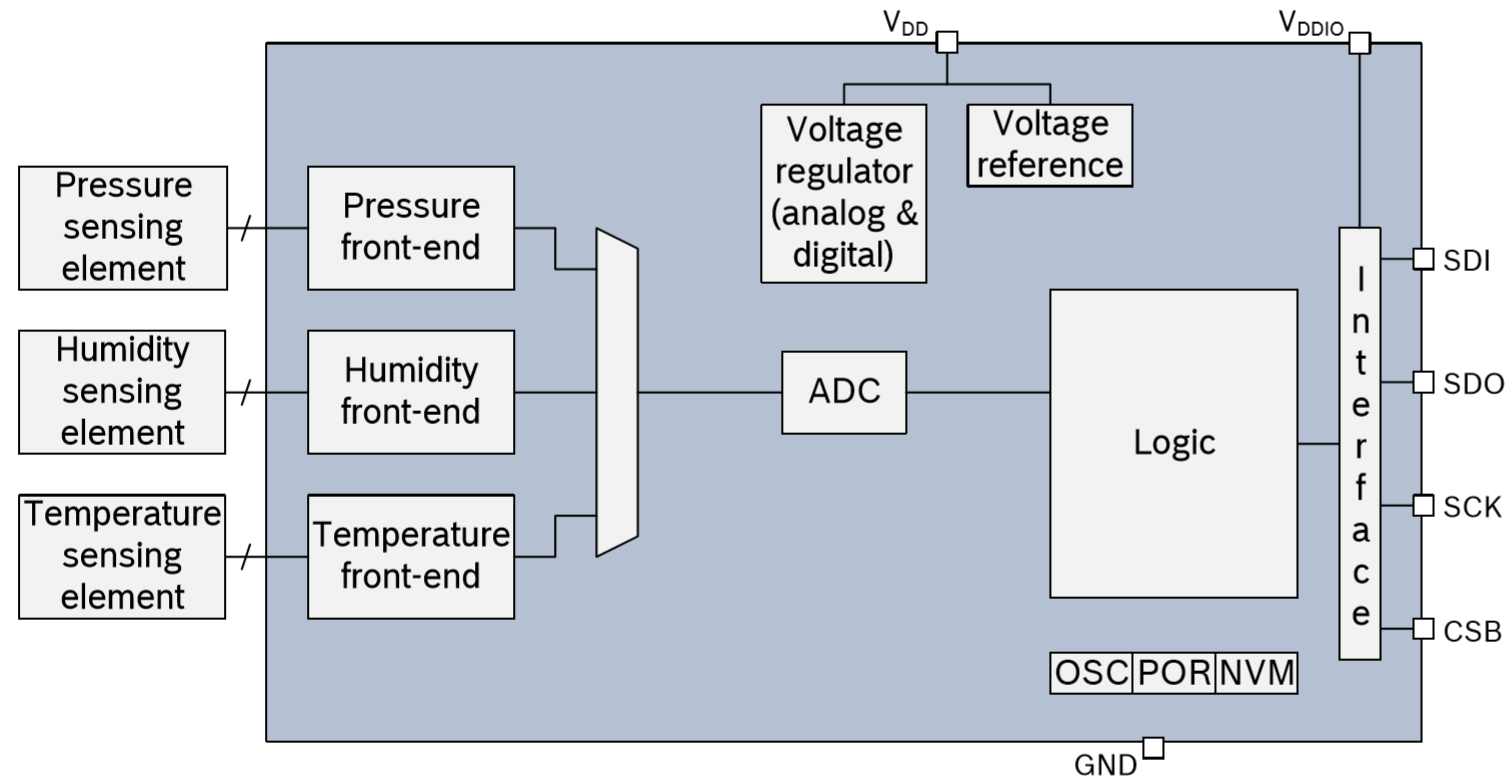
BMP280基于博世經過驗證的壓阻式壓力傳感器技術,具有高精度和線性度以及長期穩定性和高EMC穩健性。眾多器件操作選項提供了最高的靈活性,可針對功耗,分辨率和濾波器性能優化器件。為開發人員提供了一組經過測試的默認設置(例如用例),以便盡可能簡化設計。
BMP280壓力溫度傳感器采用了小巧的8引腳LGA封裝形式。其引腳排布就功能如下圖所示:
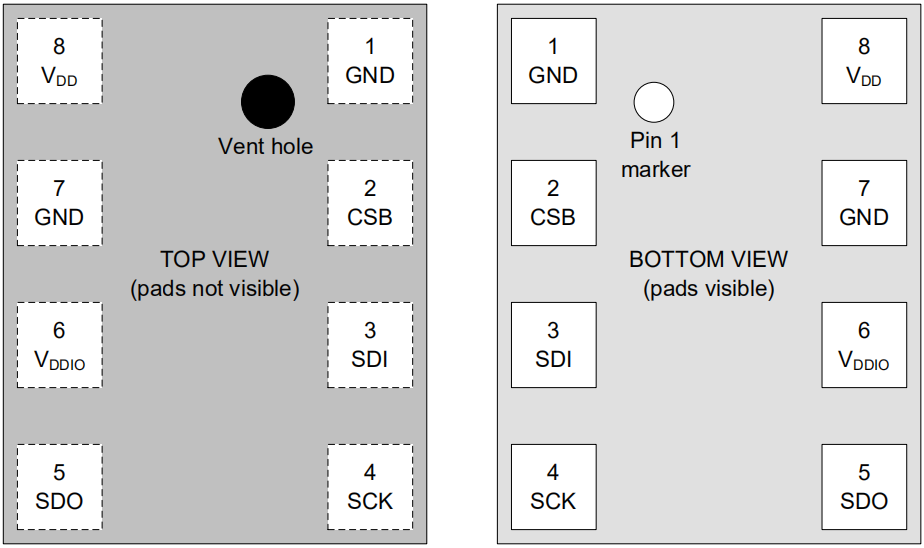
BMP280壓力溫度傳感器支持3種通訊接口方式:四線SPI、三線SPI以及I2C。在不同的接口模式下,各引腳的定義也是有差異的,關于這三種接口模式各引腳的定義如下:

對應3種不同的接口方式,BMP280壓力溫度傳感器存在三種與總線連接的方式。首先我們來看四線SPI接口方式,包括CSB片選、SCK時鐘、SDI數字輸入、SDO數字輸出。其總線連接方式如下圖:

接下來我們來看三線SPI接口方式,包括CSB片選、SCK時鐘、SDI數字輸入/SDO數字輸出。其與4線SPI的區別是數字輸入輸出使用同一引腳,第3腳就是輸入也是輸出,而第5腳浮空。其總線連接方式如下圖:

最后我們來看I2C接口方式,包括SCL時鐘、SDA數字輸入輸出。在I2C接口模式下,第2腳CSB連接到高電平,以設置BMP280壓力溫度傳感器使用I2C接口。而第5腳則可以通過連接高電平或低電平來設置設備地址的最后一位,不可以浮空。所以根據第5腳電頻不同,BMP280壓力溫度傳感器的I2C設備7位地址為:0x76和0x77。其總線連接方式如下圖:

BMP280壓力溫度傳感器在使用SPI接口時,支持SPI模式0(CPOL=CPHA=0)和模式3(CPOL=CPHA=1)。而在使用I2C接口時,支持標準模式、快速模式以及高速模式。接口的選擇實際上是通過CSB的電位實現的,低電平時就是SPI,高電平時就是I2C。
1.2 、數據存儲結構
對BMP280壓力溫度傳感器的所有操作都是通過讀寫對應的寄存器來實現的。BMP280壓力溫度傳感器中所有的寄存器都是8位的。這些寄存器在存儲器中的地址分配如下圖所示。

在上圖并未包括系統保留的寄存器,這些寄存器不可以進行寫操作,讀出來的值也是無意義的。接下來我們來詳細描述上圖中的這些寄存器。
先來看看兩個比較特殊的寄存器。首先是ID寄存器,這個寄存器是只讀的,而且其存儲的值也固定為0x58,用來代表設備為BMP280壓力溫度傳感器。這個寄存器在系統上電后即可讀取。還有復位寄存器,這個寄存器是只寫的,固定向其寫0xB6來實現BMP280壓力溫度傳感器的復位。同樣只要系統上電后即可以寫復位寄存器。
狀態寄存器是只讀的,其實只使用了其中的兩位,這兩位分別表示數據測量是否完成和影響寄存器是否更新。下圖是狀態寄存器的詳細說明:

測量控制寄存器是可讀寫的,用以配置BMP280壓力溫度傳感器數據獲取的方式。分別配置溫度采樣、壓力采樣和工作模式。工作模式有三種:休眠模式、強制模式、正常模式。系統上電后即為休眠模式,通過這一寄存器的配置可以使BMP280壓力溫度傳感器進入強制模式或正常模式運行。測量控制寄存器的各位定義如下圖:

配置寄存器用于設置BMP280壓力溫度傳感器的速率、過濾器以及接口模式。在休眠模式下寫配置寄存器是允許的,但在正常模式下會被忽略,所以在系統復位后,進入正常模式前先寫配置寄存器。配置寄存器各位的定義如下圖所示:

壓力數據寄存器存儲有壓力測量數據輸出的原始值。使用了三個寄存器中的20位來下存儲壓力數據。壓力數據寄存器各位的定義如下圖所示:

溫度數據寄存器存儲有溫度測量數據輸出的原始值。使用了三個寄存器中的20位來下存儲溫度數據。溫度數據寄存器各位的定義如下圖所示:

此外還有校準數據寄存器,總共是26個寄存器,存儲了計算壓力溫度最終值的廠家校準數據。這些校準寄存器的定義及地址分配如下圖所示:

我們已經說過面向BMP280壓力溫度傳感器的所有操作都是基于寄存器進行的,我們已經了解了BMP280壓力溫度傳感器的各個寄存器,現在可以來實現它的操作了。
2 、驅動設計與實現
我們已經比較詳細的說明了BMP280的引腳定義、通訊接口、數據存儲格式,在此基礎上我們將設計并實現BMP280壓力溫度傳感器的驅動程序。
2.1 、對象定義
在使用一個對象之前我們需要獲得一個對象。同樣的我們想要BMP280壓力溫度傳感器就需要先定義BMP280壓力溫度傳感器的對象。
2.1.1 、對象類型抽象
我們要得到BMP280壓力溫度傳感器對象,需要先分析其基本特性。一般來說,一個對象至少包含兩方面的特性:屬性與操作。接下來我們就來從這兩個方面思考一下BMP280壓力溫度傳感器的對象。
先來考慮屬性,作為屬性肯定是用于標識或記錄對象特征的東西。我們來考慮BMP280壓力溫度傳感器對象屬性。BMP280壓力溫度傳感器的ID寄存器用于標識設備是否為BMP280;配置寄存器和測量控制寄存器都用關于系統配置,指示了設備的工作狀態,所以我們將這三個寄存器定義為對象的屬性。而使用的通訊接口決定了訪問BMP280壓力溫度傳感器的行為,所以我們需要記住這一配置;而校準數據則在計算數據時所要使用的,我們也需要記住這些參數,所以我們將它們也都定義為屬性。在I2C接口模式時,設備地址是區分總線上設備的唯一標志,所以我們將其定義為屬性。同樣測量數據指示了設備當前的工作狀態,我們將器作為屬性。
接著我們還需要考慮BMP280壓力溫度傳感器對象的操作問題。我們需要與BMP280壓力溫度傳感器通訊就需要向其寫數據并從其讀數據,而不論是SPI接口還是I2C接口,讀寫操作都以來與具體的硬件平臺,所以我們將他們作為對象的操作。此外,為控制時序,我們需要延時操作,而延時行為的實現亦依賴于具體的軟硬件平臺,所以我們將延時也作為對象的操作。
根據上述我們對BMP280壓力溫度傳感器的分析,我們可以定義BMP280壓力溫度傳感器的對象類型如下:
1 /*定義BMP280操作對象*/
2 typedef struct BMP280Object{
3 uint8_t bmpAddress; //I2C接口時設備地址
4 uint8_t chipID; //芯片ID
5 uint8_t config; //配置寄存器
6 uint8_t ctrlMeas; //測量控制寄存器
7 BMP280PortType port; //接口選擇
8 Bmp280CalibParamType caliPara; //校準參數
9 float pressure; //壓力值
10 float temperature; //溫度值
11 void (*Read)(struct BMP280Object *bmp,uint8_t regAddress,uint8_t *rData,uint16_t rSize); //讀數據操作指針
12 void (*Write)(struct BMP280Object *bmp,uint8_t regAddress,uint8_t command); //寫數據操作指針
13 void (*Delayms)(volatile uint32_t nTime); //延時操作指針
14 void (*ChipSelect)(BMP280CSType en); //使用SPI接口時,片選操作
15 }BMP280ObjectType;
2.1.2 、對象初始化
我們知道,一個對象僅作聲明是不能使用的,我們需要先對其進行初始化,所以這里我們來考慮BMP280壓力溫度傳感器對象的初始化函數。一般來說,初始化函數需要處理幾個方面的問題。一是檢查輸入參數是否合理;二是為對象的屬性賦初值;三是對對象作必要的初始化配置。據此我們設計BMP280壓力溫度傳感器對象的初始化函數如下:
1 /* 實現BMP280初始化配置 */
2 void BMP280Initialization(BMP280ObjectType *bmp, //BMP280對象
3 uint8_t bmpAddress, //I2C接口是設備地址
4 BMP280PortType port, //接口選擇
5 TimeStandbyType t_sb, //間隔周期
6 IIRFilterCoeffType filter, //過濾器
7 UseSPI3wType spi3W_en, //3線SPI控制
8 TemperatureSampleType osrs_t, //溫度精度
9 PressureSampleType osrs_p, //壓力精度
10 PowerModeType mode, //電源模式
11 BMP280Read Read, //讀數據操作指針
12 BMP280Write Write, //寫數據操作指針
13 BMP280Delayms Delayms, //延時操作指針
14 BMP280ChipSelect ChipSelect //片選操作指針
15 )
16 {
17 uint8_t try_count = 5;
18 uint8_t regAddress=0;
19 uint8_t command=0;
20
21 bmp->chipID=0x00;
22 bmp->pressure=0.0;
23 bmp->temperature=0.0;
24 bmp->bmpAddress=0x00;
25 bmp->port=port;
26 if(bmp->port==I2C)
27 {
28 if((bmpAddress==0xEC)||(bmpAddress==0xEE))
29 {
30 bmp->bmpAddress=bmpAddress;
31 }
32 bmp->ChipSelect=NULL;
33 }
34 else
35 {
36 bmp->ChipSelect=ChipSelect;
37 }
38 bmp->Read=Read;
39 bmp->Write=Write;
40 bmp->Delayms=Delayms;
41 bmp->caliPara.t_fine=0;
42
43 if(!ObjectIsValid(bmp))
44 {
45 return;
46 }
47
48 while(try_count--)
49 {
50 bmp->chipID=ReadBMP280Register(bmp,REG_BMP280_ID);
51 if(0x58==bmp->chipID)
52 {
53 BMP280SoftReset(bmp);
54
55 break;
56 }
57 }
58
59 if(try_count)
60 {
61 /*配置配置寄存器:間隔周期0.5ms、IIR濾波系數16、不使用SPI3線通訊*/
62 regAddress=REG_CONFIG;
63 command=t_sb|filter|spi3W_en;
64 WriteBMP280Register(bmp,regAddress,command);
65
66 /*配置測量控制寄存器:溫度20位,壓力20位,電源正常模式*/
67 regAddress=REG_CTRL_MEAS;
68 command=osrs_t|osrs_p|mode;
69 WriteBMP280Register(bmp,regAddress,command);
70
71 bmp->Delayms(10);
72 bmp->config=ReadBMP280Register(bmp,REG_CONFIG);
73 bmp->Delayms(10);
74 bmp->ctrlMeas=ReadBMP280Register(bmp,REG_CTRL_MEAS);
75 bmp->Delayms(10);
76 /*讀取校準值*/
77 GetBMP280CalibrationData(bmp);
78 }
79 }
2.2 、對象操作
我們已經完成了BMP280壓力溫度傳感器對象類型的定義和對象初始化函數的設計。但我們的主要目標是獲取對象的信息,接下來我們還要實現面向BMP280壓力溫度傳感器的各類操作。
2.2.1 、寫寄存器
我們已經說過了,對BMP280的操作都是通過讀寫寄存器實現的。這里我們先來看寫寄存器。在I2C接口方式下,寫寄存器操作是在從站地址的最后一位來識別的,再加上要寫的寄存器地址和數據來實現的,這也是I2C協議的標準做法。其時序圖如下所示:

而在SPI接口方式下,由于SPI并未有設備地址,也不存在用從還在那地址最后為來標記讀寫的模式。通常一些設備需要定義操作碼來實現讀寫區分,但BMP280采取了將寄存器地址的最高位置零表示為寫。之所以可以這樣定義,是因為BMP280寄存器地址分配的特殊性決定的。改變寄存器地址的最高位也能區分不同的寄存器,絕不會重復。在SPI接口方式下,寫寄存器的時序圖如下所示:

根據上述描述和時序圖,我們可以實現寫BMP280壓力溫度傳感器寄存器的程序。
1 /* 向BMP280寄存器寫一個字節 */
2 static void WriteBMP280Register(BMP280ObjectType *bmp,uint8_t regAddress,uint8_t command)
3 {
4 if(ObjectIsValid(bmp))
5 {
6 if(bmp->port==BMP280_SPI)
7 {
8 regAddress&=0x7F;
9 bmp->ChipSelect(BMP280CS_Enable);
10 bmp->Delayms(1);
11 bmp->Write(bmp,regAddress,command);
12 bmp->Delayms(1);
13 bmp->ChipSelect(BMP280CS_Disable);
14 }
15 else
16 {
17 bmp->Write(bmp,regAddress,command);
18 }
19 }
20 }
2.2.2 、讀寄存器
讀寄存器的處理方式與寫寄存器是類似。在I2C接口方式下,將從站地址的最低位置1來表示讀。在I2C接口方式下,讀寄存器的時序圖如下所示:

而在SPI接口方式下,通過將寄存器地址的最高位置1來標識為讀操作。事實上,所有寄存器地址的最高位都是1,所以在讀操作時實際不需要做處理。在SPI接口方式下,讀寄存器的時序圖如下所示:

根據上述描述和時序圖,我們可以實現讀BMP280壓力溫度傳感器寄存器的程序。
1 /*從BMP280寄存器讀取一個字節*/
2 static uint8_t ReadBMP280Register(BMP280ObjectType *bmp,uint8_t regAddress)
3 {
4 uint8_t regValue=0xFF;
5
6 if(ObjectIsValid(bmp))
7 {
8 if(bmp->port==BMP280_SPI)
9 {
10 regAddress |= 0x80;
11 bmp->ChipSelect(BMP280CS_Enable);
12 bmp->Delayms(1);
13 bmp->Read(bmp,regAddress,®Value,1);
14 bmp->Delayms(1);
15 bmp->ChipSelect(BMP280CS_Disable);
16 }
17 else
18 {
19 bmp->Read(bmp,regAddress,®Value,1);
20 }
21 }
22
23 return regValue;
24 }
3 、驅動的使用
我們已經設計了BMP280壓力溫度傳感器的驅動程序,接下來這一節我們將基于BMP280壓力溫度傳感器的驅動程序設計一個簡單的驗證應用。
3.1 、聲明并初始化對象
使用基于對象的操作我們需要先得到這個對象,所以我們先要使用前面定義的BMP280壓力溫度傳感器對象類型聲明一個BMP280壓力溫度傳感器對象變量,具體操作格式如下:
BMP280ObjectType bmp280;
聲明了這個對象變量并不能立即使用,我們還需要使用驅動中定義的初始化函數對這個變量進行初始化。這個初始化函數所需要的輸入參數如下:
BMP280ObjectType *bmp,BMP280對象
uint8_t bmpAddress,I2C接口是設備地址
BMP280PortType port,接口選擇
BMP280TimeStandbyType t_sb,間隔周期
BMP280IIRFilterCoeffType filter,過濾器
BMP280UseSPI3wType spi3W_en,3線SPI控制
BMP280TemperatureSampleType osrs_t,溫度精度
BMP280PressureSampleType osrs_,壓力精度
BMP280PowerModeType mode,電源模式
BMP280Read Read,讀數據操作指針
BMP280Write Write,寫數據操作指針
BMP280Delayms Delayms,延時操作指針
BMP280ChipSelect ChipSelect,片選操作指針
對于這些參數,對象變量我們已經定義了。接口選擇、間隔周期、過濾器、3線SPI控制、溫度精度、壓力精度、電源模式等都是枚舉量我們根據實際情況輸入即可。而使用I2C接口時需要的設備地址,也按具體地址給入就好。主要的是我們需要定義幾個函數,并將函數指針作為參數。這幾個函數的類型如下:
1 /* 定義讀數據操作函數指針類型 */
2 typedef void (*BMP280Read)(BMP280ObjectType *bmp,uint8_t regAddress,uint8_t *rData,uint16_t rSize);
3
4 /* 定義寫數據操作函數指針類型 */
5 typedef void (*BMP280Write)(BMP280ObjectType *bmp,uint8_t regAddress,uint8_t command);
6
7 /* 定義延時操作函數指針類型 */
8 typedef void (*BMP280Delayms)(volatile uint32_t nTime);
9
10 /* 定義使用SPI接口時,片選操作函數指針類型 */
11 typedef void (*BMP280ChipSelect)(BMP280CSType cs);
對于這幾個函數我們根據樣式定義就可以了,具體的操作可能與使用的硬件平臺有關系。若采用的SPI接口則需注意片選操作,片選操作函數用于多設備需要軟件操作時,如采用硬件片選可以傳入NULL即可。同樣如果采用的是I2C接口,則片選可以傳入NULL即可。具體函數定義如下:
1 /*讀BMP280寄存器值*/
2 static void ReadDataFromBMP280(BMP280ObjectType *bmp280,uint8_t regAddress,uint8_t *rData,uint16_t rSize)
3 {
4 HAL_I2C_Master_Transmit(&bmp280hi2c, bmp280->bmpAddress,®Address,1,1000);
5
6 HAL_I2C_Master_Receive(&bmp280hi2c, bmp280->bmpAddress+1,rData, rSize, 1000);
7 }
8
9 /*寫BMP280寄存器值*/
10 static void WriteDataToBMP280(BMP280ObjectType *bmp280,uint8_t regAddress,uint8_t command)
11 {
12 uint8_t pData[2];
13
14 pData[0]=regAddress;
15 pData[1]=command;
16
17 HAL_I2C_Master_Transmit(&bmp280hi2c,bmp280->bmpAddress, pData, 2,1000);
18 }
對于延時函數我們可以采用各種方法實現。我們采用的STM32平臺和HAL庫則可以直接使用HAL_Delay()函數。于是我們可以調用初始化函數如下:
1 BMP280Initialization(&bmp280, //BMP280對象
2 0xEC, //I2C接口是設備地址
3 BMP280_I2C, //接口選擇
4 BMP280_T_SB_0P5, //間隔周期
5 BMP280_IIR_FILTER_COEFF_X16, //過濾器
6 BMP280_SPI3W_DISABLE, //3線SPI控制
7 BMP280_TEMP_SAMPLE_X16, //溫度精度
8 BMP280_PRES_SAMPLE_X16, //壓力精度
9 BMP280_POWER_NORMAL_MODE, //電源模式
10 ReadDataFromBMP280, //讀數據操作指針
11 WriteDataToBMP280, //寫數據操作指針
12 HAL_Delay, //延時操作指針
13 NULL //片選操作指針
14 );
3.2 、基于對象進行操作
我們定義了對象變量并使用初始化函數給其作了初始化。接著我們就來考慮操作這一對象獲取我們想要的數據。我們在驅動中已經將獲取數據并轉換為轉換值的比例值,接下來我們使用這一驅動開發我們的應用實例。
1 /*獲取大氣壓力和溫度*/
2 void BMP280GetEnvironmentalData(void)
3 {
4 float pressure; //壓力值
5 float temperature; //溫度值
6
7 GetBMP280Measure(&bmp280);
8
9 pressure=bmp280.pressure;
10 temperature=bmp280.temperature;
11 }
4 、應用總結
BMP280壓力溫度傳感器的驅動已經實現并做了簡單的應用。在我們測試時,得到的數據與其它方法獲得的溫度壓力數據基本是一致的,這說明我們的驅動程序總體來說是正確的。
BMP280壓力溫度傳感器支持SPI和I2C兩種接口,而且SPI也支持3線和4線模式,但我們在測試應用中只使用了I2C接口,SPI接口還有待測試。
在使用驅動時需注意,采用SPI接口的器件需要考慮片選操作的問題。如果片選信號是通過硬件電路來實現的,我們在初始化時給其傳遞NULL值。如果是軟件操作片選則傳遞我們編寫的片選操作函數。而如果采用I2C接口,那么在初始化時也應傳遞NULL值。
BMP280壓力溫度傳感器在使用SPI接口時,支持SPI模式0(CPOL=CPHA=0)和模式3(CPOL=CPHA=1)。而在使用I2C接口時,支持標準模式、快速模式以及高速模式。而且在使用I2C接口時,SDO引腳必須接高電平或低電平,以確定設備地址。
源碼獲取:https://github.com/foxclever/ExPeriphDriver










 工商網監
工商網監
評論