以往的雷達(dá)測(cè)速儀,由于技術(shù)的限制,不能判別出目標(biāo)的運(yùn)動(dòng)方向,因此,當(dāng)所測(cè)區(qū)域既有同向的又有反向的車時(shí)。雷達(dá)就無(wú)法判別出所測(cè)速度到底是那一輛的。隨著技術(shù)的發(fā)展,有些新型的測(cè)速雷達(dá)已可以判別出目標(biāo)的運(yùn)動(dòng)方向,因此,大大提高了測(cè)試的可靠性和可信度。
2016-01-26 10:28:46 7968
7968 目前市場(chǎng)上的測(cè)速雷達(dá)大多采用單頻連續(xù)波(CW調(diào)制),“高精度定位”實(shí)際上是利用雷達(dá)對(duì)目標(biāo)車輛的反射能量強(qiáng)度來(lái)進(jìn)行設(shè)定。納雷科技發(fā)布新一代雙鑒引擎測(cè)距測(cè)速雷達(dá),納雷雙鑒測(cè)速雷達(dá)同時(shí)具備測(cè)距和測(cè)速功能,有效提高目標(biāo)捕獲率和精度,避免空拍和重拍問題。
2019-03-19 16:05:413151 ,還有很多其他的事物,微波傳感器不受環(huán)境溫度的影響,探測(cè)距離遠(yuǎn),靈敏度高,被廣泛應(yīng)用于工業(yè)、交通及民用裝置中,如車輛測(cè)速、自動(dòng)門、感應(yīng)燈(過道燈、筒燈)、感應(yīng)水龍頭、安防產(chǎn)品、倒車雷達(dá)等。
2021-12-15 19:54:46
雷達(dá)傳感器做成便攜式的測(cè)速儀、測(cè)距儀等,對(duì)于滑雪、跑步、高爾夫等運(yùn)動(dòng)具有很好的輔助作用。 以下為運(yùn)用匯總:交通領(lǐng)域: ▇ 交通監(jiān)控:卡口測(cè)速、雷達(dá)測(cè)速儀、車流量檢測(cè)/統(tǒng)計(jì)/監(jiān)測(cè)、雷達(dá)測(cè)速牌 ▇ 汽車
2013-12-20 16:56:48
` 本帖最后由 er0804 于 2016-8-29 15:04 編輯
1、交通測(cè)速雷達(dá)2、卡口單車道測(cè)速雷達(dá)3、側(cè)裝、移動(dòng)測(cè)速雷達(dá)4、車速顯示屏雷達(dá)`
2016-08-23 14:26:53
`跟大家分享一篇24GHz微波雷達(dá)FMCW測(cè)距系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)的論文,24GHz微波雷達(dá)FMCW測(cè)距技術(shù),目前主要應(yīng)用于智能交通行業(yè)的斷面車流量雷達(dá)檢測(cè);無(wú)人機(jī)行業(yè)的農(nóng)業(yè)無(wú)人機(jī)雷達(dá)高度計(jì);停車場(chǎng)行業(yè)
2015-12-29 11:37:46
服務(wù)。24GHz雷達(dá)傳感器采用平面微帶技術(shù),具有體積小、靈敏度高、探測(cè)范圍廣等特點(diǎn),CW/FMCW/FSK/Monopulse模式實(shí)現(xiàn)測(cè)速、測(cè)距、測(cè)角度等功能,廣泛用于交通、汽車電子、安防、工業(yè)控制
2015-12-17 10:26:10
感應(yīng)。同樣具有探測(cè)距離/靈敏度/覆蓋范圍可調(diào),性能穩(wěn)定性好,抗干擾能力強(qiáng),不受環(huán)境影響等優(yōu)點(diǎn)。3、雷達(dá)測(cè)速牌/車速顯示屏,一般作用距離100~200米。可以選用K-MC1/K-MC1-LP(低功耗版本
2015-08-24 11:34:09
在1萬(wàn)多小時(shí),脈沖TOF的激光器是無(wú)限時(shí)間。業(yè)內(nèi)最新的三角測(cè)距法激光雷達(dá)將測(cè)量速度4000次/秒,提高到了16000次/秒,等效60us測(cè)量一次,激光器占空比壓縮了四倍,意味著激光器連續(xù)壽命減少4倍
2018-11-09 19:49:16
在道路上,交警手上的測(cè)速儀是個(gè)很好的工具,你知道它是怎么工作的嗎?目前國(guó)際上流行的交警測(cè)速儀有激光測(cè)速儀和雷達(dá)測(cè)速儀兩種,那么這兩種測(cè)速儀又有什么區(qū)別呢。雷達(dá)測(cè)速
2010-12-02 10:03:32
雷達(dá)為利用無(wú)線電回波以探測(cè)目標(biāo)方向和距離的一種裝置。雷達(dá)為英文Radar一字的譯音,該字系由Radio Detection And Ranging一語(yǔ)中諸字前綴縮寫而成,為無(wú)線電探向與測(cè)距之意。
2019-09-10 10:43:34
如題,CW模式主要用于探測(cè)速度,可是我只想探測(cè)距雷達(dá)10m以內(nèi)車輛的速度,該如何限制雷達(dá)的探測(cè)距離呢?
2016-08-22 09:52:14
`先描述下我做的東西和方法:現(xiàn)在我要自己做個(gè)雷達(dá)測(cè)速測(cè)距項(xiàng)目,使用集成方案,TX射頻輸出端是差分輸出的,然后通過威爾金森功率合成器(微帶)將功率合并后輸出到微帶天線陣。接下來(lái)問題:1,威爾金森功率
2019-07-12 19:05:23
有人能做出FMCW測(cè)距雷達(dá)么
2014-03-20 21:51:31
TOF 方案激光雷達(dá)是激光雷達(dá)新一代技術(shù)方案,本產(chǎn)品解決了如市場(chǎng)三角測(cè)試法等產(chǎn)品組裝問題難,價(jià)格成本高等問題,目前提供面陣及單光子技術(shù),基于COM產(chǎn)品。集成了SPAD,TDC,DSP,RAM
2019-06-07 00:03:35
申請(qǐng)理由:項(xiàng)目描述:收到產(chǎn)品后 會(huì)先了解一下功能主要是摸索F4 ADC DAC 功能 因?yàn)樗惴?已經(jīng)寫好剩下的問題就是移植 先做出來(lái)雷達(dá)測(cè)速功能 然后在摸索測(cè)距
2016-11-07 16:38:03
申請(qǐng)理由:我對(duì)DSP一直很感興趣,學(xué)習(xí)過TMS320C2000系列的DSP,實(shí)現(xiàn)過FFT和IFFT變換的算法,在學(xué)習(xí)DSP的時(shí)候想實(shí)現(xiàn)一個(gè)基于DSP的雷達(dá)測(cè)速監(jiān)控系統(tǒng)的項(xiàng)目。我從大一就進(jìn)入學(xué)校的電子
2015-09-10 11:11:09
項(xiàng)目名稱:滅火彈測(cè)距試用計(jì)劃:1.申請(qǐng)理由:為了保證滅火效果,需要在一定距離上起爆滅火劑2.申請(qǐng)計(jì)劃:設(shè)計(jì)滅火控制器,預(yù)留串口接口在滅火彈上裝激光雷達(dá)傳感器,在4-8m上空播撒滅火劑評(píng)估測(cè)距精度,近炸效果在可能的情況下對(duì)不同速度下的雷達(dá)測(cè)距進(jìn)行試驗(yàn)
2020-05-28 17:31:48
。DOPPLER雷達(dá)發(fā)射信號(hào)不帶有明確引起距離變化的因素,由此引起的測(cè)速誤差可以忽略。FMCW雷達(dá)則往往無(wú)法區(qū)分頻率的差異的原因到底是哪個(gè)或各占多大比例。此時(shí)尋求絕對(duì)精確測(cè)距就無(wú)意義了,工程上就是進(jìn)行
2015-12-12 14:18:18
來(lái)說同樣重要,并且對(duì)于三角測(cè)距激光雷達(dá)而言,也更具有挑戰(zhàn)。 由于測(cè)量原理的關(guān)系,雖然一般在10米以內(nèi)都可以實(shí)現(xiàn)很高的測(cè)距分辨率,但其分辨率亦會(huì)隨著探測(cè)物體距離增加而劇烈下降。 因此,為了實(shí)現(xiàn)更遠(yuǎn)
2018-02-02 14:06:27
RFbeam公司推出低成本短距離測(cè)速、測(cè)距、測(cè)方向微波雷達(dá)傳感器K-LC系列,傳感器的檢測(cè)距離為0.5~40m不等,檢測(cè)角度為32度~80度不等。與能夠檢測(cè)100m以上距離的微波雷達(dá)相比,檢測(cè)距
2014-01-03 14:16:10
連接,如果車位已滿,入口讀卡機(jī)則不會(huì)受理入場(chǎng),并在電子顯示屏上顯示“車位已滿”等中文字樣。車輛探測(cè)部分我們有兩種可行性方案可以提供:1. 用一個(gè)雷達(dá)探測(cè)多個(gè)車位,采用K-LC6型號(hào),根據(jù)FMCW測(cè)速測(cè)距
2014-01-03 14:44:13
具有實(shí)時(shí)語(yǔ)音播報(bào)的超聲波測(cè)距測(cè)速儀的設(shè)計(jì)的硬件需要什么?你們誰(shuí)會(huì)啊?謝謝了
2012-03-16 16:06:47
我們公司:寧波寧友自動(dòng)化設(shè)備有限公司曾經(jīng)在為客戶開發(fā)一款雷達(dá)測(cè)速產(chǎn)品,以前我們基本使用進(jìn)口雷達(dá),很少用國(guó)產(chǎn)雷達(dá),這次因客戶要求,我們采用國(guó)產(chǎn)雷達(dá),在雷達(dá)用料方面,我們沒有發(fā)現(xiàn)與進(jìn)口有什么區(qū)別,但是
2020-07-20 09:24:57
這是一個(gè)基于ARM920T內(nèi)核的24GHZ微波雷達(dá)測(cè)速儀設(shè)計(jì)與算法研究的方案,希望能對(duì)大家有參考幫助。導(dǎo)讀:為了提高目前公路交通中對(duì)車輛速度的監(jiān)測(cè)手段,提出一種基于ARM(advancedRISC
2014-07-24 14:14:20
信號(hào)。第三是測(cè)速 +測(cè)距+測(cè)角(廣域雷達(dá)),將角度的概念融入進(jìn)來(lái),可精準(zhǔn)的判斷每一個(gè)目標(biāo)的即時(shí)位置和即時(shí)速度。二、 雷達(dá)測(cè)速儀一般道路上的雷達(dá)測(cè)速儀分為固定測(cè)速和移動(dòng)測(cè)速兩類。固定測(cè)速又分為定點(diǎn)式雷達(dá)測(cè)速
2020-09-29 16:31:38
及功能得到了廣泛的應(yīng)用。 本研究中雷達(dá)模塊采用雷達(dá)ⅣS.148,利用集成電路產(chǎn)生三角波,驅(qū)動(dòng)其發(fā)射信號(hào)。在處理雷達(dá)混頻輸出信號(hào)時(shí),利用芯片ADS7890進(jìn)行對(duì)其進(jìn)行快速模/數(shù)轉(zhuǎn)換ADS7890模數(shù)轉(zhuǎn)換
2021-12-27 17:08:50
1、基于RT-Thread和N32G457的測(cè)距雷達(dá)采集顯示功能介紹采集測(cè)距雷達(dá)數(shù)據(jù),經(jīng)過開發(fā)板處理后,將數(shù)據(jù)在LCD顯示屏上顯示,同時(shí)在串口輸出距測(cè)距信息。硬件框圖**軟件框圖原作者:TLLED
2022-07-05 16:08:05
這是基于FPGA的實(shí)時(shí)雷達(dá)測(cè)距研究方案。是自己作SRTP的一個(gè)課題
2012-07-27 10:38:45
激光測(cè)距原理是什么?如何實(shí)現(xiàn)激光脈沖測(cè)距雷達(dá)系統(tǒng)?
2021-04-29 06:14:35
脈內(nèi)非線性相位調(diào)制,寬脈沖具有窄脈沖的帶寬,通過匹配濾波或相關(guān)積分處理后,可壓縮成窄脈沖輸出,稱之為脈沖壓縮信號(hào)。這種信號(hào)既具有寬脈沖波形的優(yōu)良檢測(cè)性能和測(cè)速性能,又具有窄脈沖波形的高距離分辨力和測(cè)距
2020-06-23 15:26:58
隨著電子技術(shù)的飛速發(fā)展,雷達(dá)技術(shù)也得到了長(zhǎng)足的進(jìn)步。雷達(dá)是以軍事目的發(fā)展起來(lái)的,在當(dāng)今主基調(diào)為和平與發(fā)展的年代,雷達(dá)技術(shù)越來(lái)越多地向民用方面轉(zhuǎn)移。像我國(guó)普遍用于交通方面的測(cè)速雷達(dá),正在飛速發(fā)展的汽車
2020-11-23 11:02:10
微型測(cè)距雷達(dá)主要用于哪些方面?微型測(cè)距雷達(dá)的原理及組成是什么?怎么實(shí)現(xiàn)一種低成本微型測(cè)距雷達(dá)的設(shè)計(jì)?
2021-05-12 06:45:41
(畢設(shè))超聲波測(cè)距儀——倒車雷達(dá)電路(原理圖和PCB源文件)倒車雷達(dá)電路功能概述:該作品主體為超聲波測(cè)距,使用US-015超聲波模塊,最大量程4m,精度0.01m,有DS18B20溫度傳感器作為溫度
2021-12-31 06:25:50
去年2月,思嵐科技對(duì)外發(fā)布了第三代激光掃描測(cè)距雷達(dá)RPLIDAR A3,基于思嵐科技最新的RPVision 3.0測(cè)距引擎,可實(shí)現(xiàn)25米范圍的實(shí)用化距離探測(cè),每秒16,000的采樣頻率,刷新了三角
2019-04-23 15:48:16
交通廣域雷達(dá)測(cè)速儀概念理解1、雷達(dá)測(cè)速是什么?原理:測(cè)速雷達(dá)主要利用了多普勒效應(yīng)(Doppler Effect),當(dāng)目標(biāo)向雷達(dá)天線靠近時(shí),反射信號(hào)頻率將高于發(fā)射機(jī)頻率;反之,當(dāng)目標(biāo)遠(yuǎn)離天線而去時(shí),反射信號(hào)頻率將低于發(fā)射機(jī)率。如此即可借由頻率的改變數(shù)值,計(jì)算出目標(biāo)與雷達(dá)的相對(duì)速度。...
2021-12-24 06:19:48
問題,就是:給了機(jī)器人一雙“眼睛”。 通過激光雷達(dá),機(jī)器人可以向外界發(fā)射紅外線光源,通過三角測(cè)距或者TOF成像原理對(duì)機(jī)器人進(jìn)行定位,幫助機(jī)器人構(gòu)建所在環(huán)境的高精度輪廓信息,輔助機(jī)器人。 通過觀察這對(duì)CP
2019-02-15 15:12:28
頻率差,通過判斷差拍頻率的高低就可以判斷障礙物的距離。毫米波雷達(dá)的波長(zhǎng)從1cm到1mm,探測(cè)距離較長(zhǎng),可達(dá)200多米,可以對(duì)目標(biāo)進(jìn)行有無(wú)檢測(cè)、測(cè)距、測(cè)速以及方位測(cè)量。它具有良好的角度分辨能力,可檢測(cè)較小
2019-09-19 09:05:02
、測(cè)距、測(cè)速以及方位測(cè)量。毫米波雷達(dá)基于多普勒效應(yīng)原理。當(dāng)發(fā)射的電磁波和被探測(cè)目標(biāo)有相對(duì)移動(dòng)、回波的頻率會(huì)和發(fā)射波的頻率不同。當(dāng)目標(biāo)向雷達(dá)天線靠近時(shí),反射信號(hào)頻率將高于發(fā)射機(jī)頻率;反之,當(dāng)目標(biāo)遠(yuǎn)離天線
2021-09-22 16:17:32
毫米波雷達(dá)的特點(diǎn)、優(yōu)點(diǎn)、缺點(diǎn);毫米波雷達(dá)測(cè)距原理,測(cè)速原理,角速度測(cè)量原理;毫米波雷達(dá)系統(tǒng)架構(gòu)。 毫米波雷達(dá):ADAS/自動(dòng)駕駛核心傳感器毫米波的波長(zhǎng)介于厘米波和光波之間, 因此毫米波兼有微波制導(dǎo)
2021-07-30 08:05:28
本帖最后由 馬上有錢有對(duì)象 于 2014-3-30 02:04 編輯
RT,能測(cè)速和測(cè)距,不能占用P30和P31口。超聲波測(cè)距和霍爾測(cè)速
2014-03-30 01:53:59
求一激光測(cè)距雷達(dá)模塊最大測(cè)距30~50米即可測(cè)量精度10cm(要求可稍稍降低)價(jià)格在1000元以內(nèi)
2015-07-09 16:01:13
激光測(cè)速測(cè)距儀的測(cè)量原理是什么?
2015-09-03 17:28:22
的雷達(dá),一般會(huì)采用相干體制。按應(yīng)用分類,我們可以分得更多,比如:激光測(cè)距儀、激光三維成像雷達(dá)、激光測(cè)速雷達(dá)、激光大氣探測(cè)雷達(dá),等等。按照距離測(cè)量的原理劃分,有兩種方式:1.一種是TOF技術(shù),即Time
2017-09-19 15:51:15
來(lái)說同樣重要,并且對(duì)于三角測(cè)距激光雷達(dá)而言,也更具有挑戰(zhàn)。 由于測(cè)量原理的關(guān)系,雖然一般在10米以內(nèi)都可以實(shí)現(xiàn)很高的測(cè)距分辨率,但其分辨率亦會(huì)隨著探測(cè)物體距離增加而劇烈下降。 因此,為了實(shí)現(xiàn)更遠(yuǎn)
2018-02-07 13:40:27
自主定位導(dǎo)航的典型代表,其在25米測(cè)距半徑內(nèi),可完成每秒上萬(wàn)次的激光測(cè)距,并實(shí)現(xiàn)毫米級(jí)別的解析度。 激光測(cè)速雷達(dá) 激光測(cè)速雷達(dá)是對(duì)物體移動(dòng)速度的測(cè)量,通過對(duì)被測(cè)物體進(jìn)行兩次有特定時(shí)間間隔的激光測(cè)距,從而
2020-07-14 07:56:45
`描述TIDEP-0092參考設(shè)計(jì)為使用AWR1642評(píng)估模塊(EVM)的短程雷達(dá)(SRR)應(yīng)用提供了基礎(chǔ)。這種設(shè)計(jì)允許估計(jì)和跟蹤位置(在方位角平面中)和物體在其視野中的速度,最大可達(dá)80米,行進(jìn)
2019-01-25 14:35:52
image sensor在幾百個(gè)點(diǎn)左右),三角測(cè)距速度居中,每秒在幾百個(gè)到幾千個(gè)點(diǎn),脈沖測(cè)距法的測(cè)量速度最快,為每秒幾萬(wàn)到幾十萬(wàn)個(gè)點(diǎn)。因此,激光雷達(dá)一般采用三角測(cè)距法和脈沖測(cè)距法。而短距離激光雷達(dá)
2018-09-10 14:21:58
` 本帖最后由 佰譽(yù)達(dá)科技--陳 于 2014-1-3 14:37 編輯
汽車用低成本24GHZ雷達(dá)傳感器/測(cè)速/測(cè)距/測(cè)方向模塊K-LC系列RFbeam公司推出低成本短距離測(cè)速、測(cè)距、測(cè)方向
2014-01-03 14:36:08
- 產(chǎn)品概述 - TBR-100是一種用于機(jī)動(dòng)車行車速度測(cè)量和攝像機(jī)拍照觸發(fā)的微波雷達(dá),其測(cè)速精度和觸發(fā)精度高,并且安裝施工方便,無(wú)需破壞道路,可以廣泛應(yīng)用于高速公路、等級(jí)公路、城際公路
2021-09-22 11:45:30
本文詳細(xì)介紹了采用基于PXI體系結(jié)構(gòu)的虛擬儀器技術(shù)及其在雷達(dá)測(cè)速上的應(yīng)用,并成功的研制了某型測(cè)速雷達(dá)采集與處理終端。【關(guān)鍵詞】虛擬儀器 測(cè)速雷達(dá) PXIABSTRACT This paper
2009-08-15 15:51:07 14
14 針對(duì)當(dāng)前測(cè)速裝置容易被電子狗探測(cè),檢測(cè)結(jié)果不能實(shí)時(shí)傳輸?shù)浆F(xiàn)場(chǎng)處罰點(diǎn)等不足,設(shè)計(jì)了一種基于8051F020 的遠(yuǎn)程視頻雷達(dá)測(cè)速系統(tǒng)。繪制了系統(tǒng)的整體結(jié)構(gòu)框圖,介紹了硬件組
2010-01-07 16:07:3424 針對(duì)運(yùn)行中火車測(cè)速運(yùn)用多普勒效應(yīng)采用DSP 設(shè)計(jì)雷達(dá)測(cè)速系統(tǒng)并闡述了其基本設(shè)計(jì)思想與工作原理給出系統(tǒng)硬件軟件設(shè)計(jì)結(jié)構(gòu)和原理圖改善了原有光電測(cè)速精度提高了系統(tǒng)工作穩(wěn)
2010-11-08 08:35:1069 連續(xù)波雷達(dá)具有測(cè)量精度高、設(shè)備簡(jiǎn)單等優(yōu)點(diǎn)。連續(xù)波比相測(cè)距雷達(dá)繼承了連續(xù)波雷達(dá)的固有優(yōu)點(diǎn),由于采用了FFT比相技術(shù),不僅克服了一般連續(xù)波雷達(dá)測(cè)距
2006-03-13 14:17:201131 
雷達(dá)進(jìn)行測(cè)距,與激光測(cè)距相比,不受氣候條件限制,距離遠(yuǎn),精度高。
本文將主要
2010-10-11 09:50:256374 
我們先來(lái)說說雷達(dá)測(cè)速的原理,雷達(dá)測(cè)速儀是根據(jù)接收到的反射波頻移量的計(jì)算而得出被測(cè)物體的運(yùn)動(dòng)速度。雷達(dá)波束照射面大,因此雷達(dá)測(cè)速易于捕捉目標(biāo),無(wú)須精確瞄準(zhǔn)。雷達(dá)設(shè)備
2011-04-11 18:23:0773 文中首先介紹了雷達(dá)測(cè)距的兩種常用方法,通過分析,調(diào)頻連續(xù)波(FMCW)雷達(dá)更具有優(yōu)勢(shì),然后闡述了調(diào)頻連續(xù)波(FMCW)雷達(dá)測(cè)距系統(tǒng)的基本組成原理,再后本文論述了測(cè)頻中最常用
2013-01-30 14:32:3275 CPLD在雷達(dá)測(cè)距機(jī)中的應(yīng)用,又需要的下來(lái)看看
2016-12-16 22:23:006 變采樣率技術(shù)在連續(xù)波測(cè)速雷達(dá)中的應(yīng)用,下來(lái)看看
2017-01-08 15:59:0912 測(cè)距雷達(dá)設(shè)計(jì)與實(shí)現(xiàn)FMCW
2017-08-10 09:04:4118 和速度進(jìn)行估計(jì)的方法。具體來(lái)說:首先在OFDM系統(tǒng)模型基礎(chǔ)上,推導(dǎo)得出導(dǎo)頻信號(hào)頻域矩陣與目標(biāo)的距離、速度的關(guān)系,得出導(dǎo)頻信號(hào)測(cè)距測(cè)速方法,再對(duì)提出的OFDM導(dǎo)頻信號(hào)測(cè)距測(cè)速方法進(jìn)行論證分析和仿真實(shí)驗(yàn)。
2017-12-21 10:40:421 物體對(duì)所接收的電磁波有頻移的效應(yīng),雷達(dá)測(cè)速儀是根據(jù)接收到的反射波頻移量的計(jì)算而得出被測(cè)物體的運(yùn)動(dòng)速度。激光測(cè)速儀是采用激光測(cè)距的原理。激光測(cè)距是通過對(duì)被測(cè)物體發(fā)射激光光束,并接收該激光光束的反射
2019-03-21 10:50:50950 LFMCW 雷達(dá)測(cè)距和測(cè)速的應(yīng)用中,測(cè)量精度是主要考慮的因素。由于需兼顧距離和速度的測(cè)量精度要求,雷達(dá)系統(tǒng)參數(shù)和信號(hào)處理技術(shù)指標(biāo)的設(shè)計(jì)就變得復(fù)雜。從雷達(dá)工作原理出發(fā),在數(shù)字化信號(hào)處理中分析了時(shí)域
2019-03-22 17:04:0927 毫米波雷達(dá)的工作頻率范圍為30GHz至300GHz,可以檢測(cè)目標(biāo)、測(cè)速、測(cè)距和測(cè)量方位。
2020-07-24 16:36:207977 窄波束雷達(dá)測(cè)速儀有兩種安裝方式,分兩個(gè)方向測(cè)速,組合起來(lái)就有四種安裝方式。
2020-08-26 10:28:013236 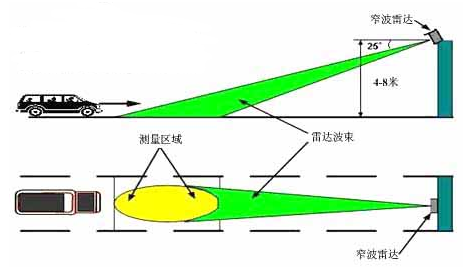
目前,公安交通管理部門大部分是利用較先進(jìn)的技術(shù)裝備(雷達(dá)測(cè)速儀)依法對(duì)機(jī)動(dòng)車的超速度行駛進(jìn)行查處,從而有效地保護(hù)人民生命財(cái)產(chǎn)的安全。從實(shí)際情況看,世界各國(guó)交通安全管理部門基本上都是以雷達(dá)測(cè)速儀顯示的數(shù)據(jù)來(lái)完成機(jī)動(dòng)車限速安全行駛的檢查工作。
2020-08-26 10:37:301030 。) 一、智慧交通廣域雷達(dá)測(cè)速儀概念理解 1、雷達(dá)測(cè)速是什么? 原理:測(cè)速雷達(dá)主要利用了多普勒效應(yīng)(Doppler Effect),當(dāng)目標(biāo)向雷達(dá)天線靠近時(shí),反射信號(hào)頻率將高于發(fā)射機(jī)頻率;反之,當(dāng)目標(biāo)遠(yuǎn)離天線而去時(shí),反射信號(hào)頻率將低于發(fā)射機(jī)率
2020-10-21 15:12:033741 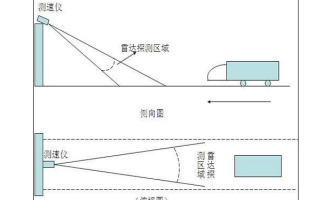
目前市場(chǎng)上機(jī)械式激光雷達(dá)使用了不同的測(cè)距原理,主要可分為三角測(cè)距和ToF測(cè)距兩類,使得雷達(dá)整體設(shè)計(jì)在尺寸、性能和成本上有較大差異。 接下來(lái)將為大家詳細(xì)介紹兩類測(cè)距方式的技術(shù)原理,幫助研發(fā)人員加深理解,從而選擇更適
2021-04-09 11:10:365603 
? 1、產(chǎn)品概述 LDTR04plus是一款集成微帶天線,射頻電路及信號(hào)處理電路的雷達(dá)模塊,直接輸出目標(biāo)的速度信息。可用于大于150米的遠(yuǎn)距離汽車測(cè)速、采用集成射頻芯片,頻率穩(wěn)定度極高,測(cè)速精度
2021-06-25 15:30:031447 
基于FSK的多車道測(cè)速雷達(dá)原理簡(jiǎn)述
2021-09-26 14:26:526 。) 一、 智慧交通廣域雷達(dá)測(cè)速儀概念理解 1、雷達(dá)測(cè)速是什么? 原理:測(cè)速雷達(dá)主要利用了多普勒效應(yīng)(Doppler Effect),當(dāng)目標(biāo)向雷達(dá)天線靠近時(shí),反射信號(hào)頻率將高于發(fā)射機(jī)頻率;反之,當(dāng)目標(biāo)遠(yuǎn)離天線而去時(shí),反射信號(hào)頻率將低于發(fā)射機(jī)率
2021-09-30 15:43:58719 的三維信息,并且具有良好的指向性,抗干擾性強(qiáng),測(cè)距精度高。 直接表現(xiàn)激光雷達(dá)系統(tǒng)測(cè)距性能的是其中系統(tǒng)級(jí)指標(biāo),測(cè)距能力反映在指標(biāo)上表現(xiàn)為max測(cè)程與測(cè)距精度。保證系統(tǒng)的發(fā)射機(jī)指標(biāo)與接收機(jī)指標(biāo)為保證測(cè)距系統(tǒng)的性能提供了基礎(chǔ)
2021-10-08 09:44:395903 
基于MSP430單片機(jī)的計(jì)步器測(cè)速測(cè)距設(shè)計(jì)(畢業(yè)設(shè)計(jì)全套資料)
2021-11-19 17:06:0323 交通廣域雷達(dá)測(cè)速儀概念理解 1、雷達(dá)測(cè)速是什么? 原理:測(cè)速雷達(dá)主要利用了多普勒效應(yīng)(Doppler Effect),當(dāng)目標(biāo)向雷達(dá)天線靠近時(shí),反射信號(hào)頻率將高于發(fā)射機(jī)頻率;反之,當(dāng)目標(biāo)遠(yuǎn)離天線而去時(shí),反射信號(hào)頻率將低于發(fā)射機(jī)率。如
2021-12-16 15:34:571090 雷達(dá)移動(dòng)式測(cè)速儀,其工作原理就是當(dāng)移動(dòng)的車輛所接收到的電磁波存在頻移的效應(yīng),而雷達(dá)移動(dòng)式測(cè)速儀就是根據(jù)所接收到的反射波頻移量,通過計(jì)算從而測(cè)速出移動(dòng)中的物體,它的運(yùn)動(dòng)速度因此雷達(dá)移動(dòng)是測(cè)速于具有以下
2022-01-11 15:55:00730 stm32倒車雷達(dá)測(cè)距protues仿真加代碼
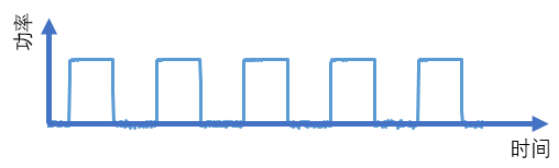
2022-05-31 11:51:4751 雷達(dá)按照發(fā)射信號(hào)的種類可分成脈沖雷達(dá)和連續(xù)波雷達(dá),常規(guī)脈沖雷達(dá)發(fā)射周期性的調(diào)制脈沖信號(hào),而連續(xù)波雷達(dá)發(fā)射的是連續(xù)波信號(hào)。通常,脈沖雷達(dá)具有較高的峰值功率和較小的占空比,而連續(xù)波雷達(dá)則具有100%的占空比和較低的功率。
2023-04-04 10:01:512814 根據(jù)雷達(dá)原理,被測(cè)目標(biāo)會(huì)把接收到的電磁波反射回雷達(dá),不過反射回來(lái)的電磁波肯定和發(fā)射出去時(shí)的電磁波變得有點(diǎn)不一樣了。就好比我們小時(shí)候如果干干凈凈的出門,但裹著滿身泥巴回家,父母就會(huì)判斷我們?cè)诘厣洗驖L
2023-05-18 11:05:42812 
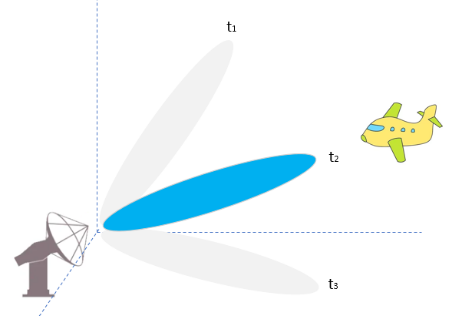
那么,雷達(dá)的測(cè)距、測(cè)角和測(cè)速又是怎么回事?看完此文保證你秒懂!
2023-05-18 11:09:10803 
激光雷達(dá),激光測(cè)距,激光測(cè)速,商用服務(wù)機(jī)器人,物流AGV車,大屏互動(dòng)
2022-01-12 18:43:23593 
園區(qū)測(cè)速設(shè)備一般可選用雷達(dá)測(cè)速反饋屏、雷視一體機(jī)+車速提示牌、彎道與路口雷達(dá)測(cè)速預(yù)警系統(tǒng)等。三種測(cè)速設(shè)備側(cè)重點(diǎn)各有不同,雷達(dá)測(cè)速反饋屏只提供基本的測(cè)速提醒功能,而雷視一體機(jī)+車速提示牌、彎道與路口雷達(dá)測(cè)速預(yù)警系統(tǒng)是在該功能基礎(chǔ)之上,進(jìn)行了更多的功能拓展。
2021-12-02 15:21:53539 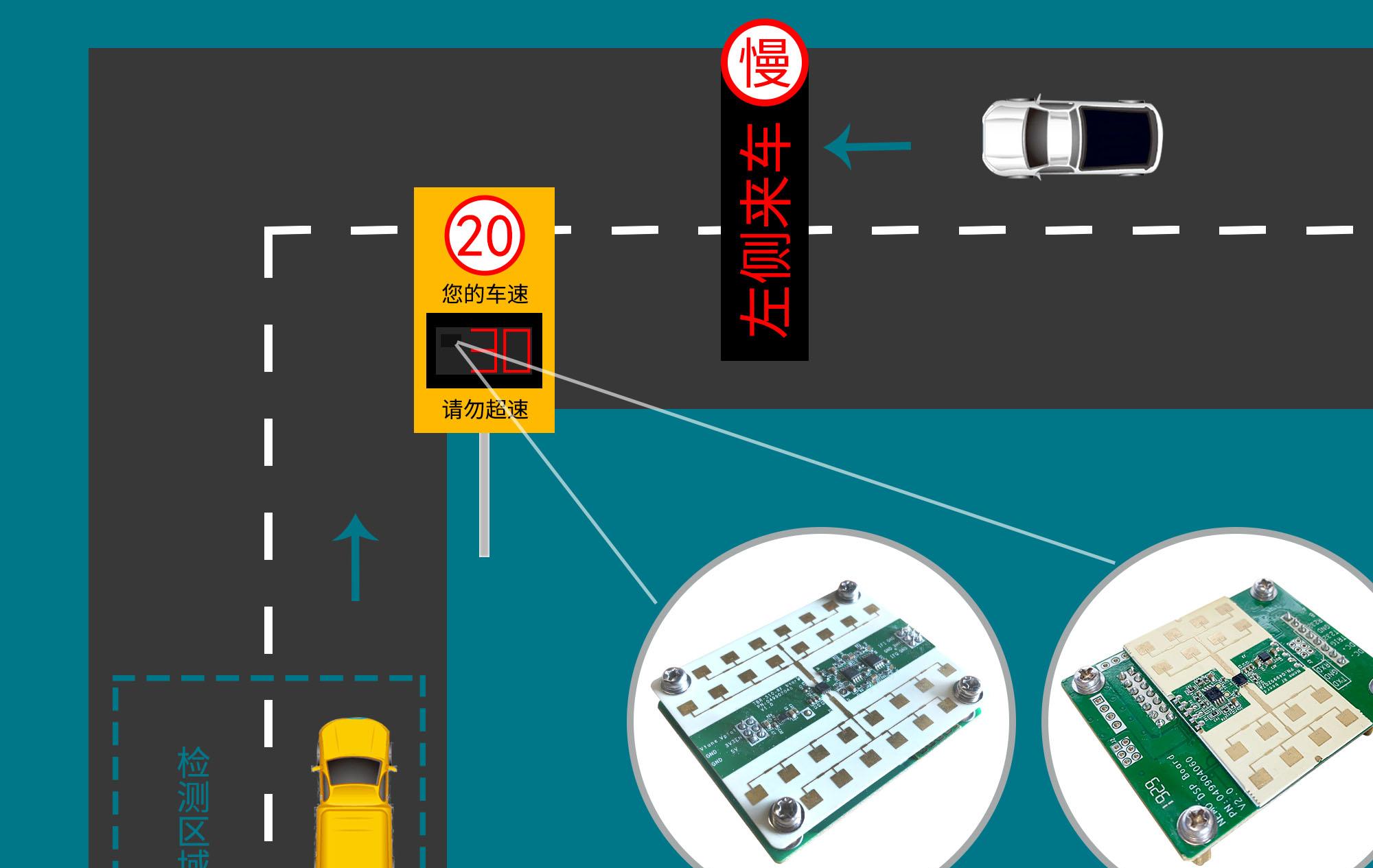
巍泰技術(shù)自主研發(fā)的交通信息檢測(cè)側(cè)裝微波雷達(dá)TBR-310、側(cè)裝多車道多目標(biāo)雷達(dá)TBR-321基于微波多普勒效應(yīng),采用窄波束準(zhǔn)確測(cè)速定位,既有效避免了相鄰車道干擾,又可實(shí)現(xiàn)1~4車道上超速車輛的檢測(cè)。
2022-04-24 11:27:07516 
雷達(dá)測(cè)速是目前最常用的測(cè)速方式,目前很多道路都用雷達(dá)測(cè)速。雷達(dá)測(cè)速主要是利用多普勒效應(yīng)原理:當(dāng)目標(biāo)向雷達(dá)天線靠近時(shí),反射信號(hào)頻率將高于發(fā)射機(jī)頻率;反之,當(dāng)目標(biāo)遠(yuǎn)離天線而去時(shí),反射信號(hào)頻率將低于發(fā)射機(jī)頻率,如此可以計(jì)算出目標(biāo)與雷達(dá)的相對(duì)速度。
2022-06-29 17:59:19609 
雷達(dá)測(cè)速大體可以分為固定式、手持式、移動(dòng)式與車載式。TBR-100適用于固定式單車道雷達(dá)測(cè)速抓拍系統(tǒng),TBR-310則可應(yīng)用于手持式雷達(dá)測(cè)速儀與移動(dòng)/車載式雷達(dá)測(cè)速抓拍系統(tǒng)。
2022-07-08 15:50:36675 
一般道路上的雷達(dá)測(cè)速儀分為固定測(cè)速和移動(dòng)測(cè)速兩類。固定測(cè)速就是指定點(diǎn)式安裝測(cè)速儀的方式來(lái)進(jìn)行定點(diǎn)測(cè)速。區(qū)別于移動(dòng)測(cè)速的靈活性,移動(dòng)測(cè)速儀可以在同一條道路不同位置、也可以是不同道路進(jìn)行靈活測(cè)速,一般移動(dòng)測(cè)速多以警車巡邏測(cè)速的方式進(jìn)行。
2022-08-11 11:26:14833 
雷達(dá)測(cè)距模組是一種基于雷達(dá)原理的測(cè)量距離和位置的電子設(shè)備,常用于機(jī)器人、無(wú)人機(jī)、汽車、物聯(lián)網(wǎng)等應(yīng)用領(lǐng)域。
2023-07-12 11:34:59338 
雷達(dá)測(cè)距模組是一種利用雷達(dá)技術(shù)實(shí)現(xiàn)距離測(cè)量和物體運(yùn)動(dòng)檢測(cè)的模塊。它通過發(fā)送電磁波,檢測(cè)反射回來(lái)的信號(hào),計(jì)算出物體與測(cè)距模組之間的距離。雷達(dá)測(cè)距模組具有高精度、高可靠性、抗干擾能力強(qiáng)等優(yōu)點(diǎn),被廣泛應(yīng)用于工業(yè)、汽車、智能家居、水利工程等領(lǐng)域。
2023-07-13 14:54:21269 雷達(dá)測(cè)速技術(shù)是利用車輛經(jīng)過檢測(cè)區(qū)域時(shí)引起雷達(dá)電磁波返回時(shí)間或頻率的變化進(jìn)行車速檢測(cè)的,其安裝維護(hù)方便、使用壽命長(zhǎng)、幾乎不受光照度、灰塵以及風(fēng)、雨、霧、雪等天氣氣候影響。因此,相較于線圈測(cè)速技術(shù),雷達(dá)測(cè)速技術(shù)更具應(yīng)用與發(fā)展前景。
2022-04-21 10:00:57329 
按照信號(hào)分類,雷達(dá)通常有兩種基本類型:連續(xù)波(CW)雷達(dá)和脈沖雷達(dá)。 連續(xù)波雷達(dá)多為小型的簡(jiǎn)易雷達(dá)。在應(yīng)用中有單載頻連續(xù)被和調(diào)制連續(xù)波兩大類。單載頻連續(xù)被雷達(dá)只能測(cè)速不能測(cè)距,廣泛用于各種測(cè)速系統(tǒng)
2023-08-25 09:59:58558 
海凌科新款24G雷達(dá)模塊HLK-LD2410H,一款專用于車輛行駛速度反饋的傳感器模塊。模塊采用K 波段射頻集成電路設(shè)計(jì),探測(cè)距離≥180 米,測(cè)速精度達(dá) 1KM/h。
2024-01-07 10:00:51397 
雷達(dá)測(cè)速的基本原理: 雷達(dá)測(cè)速是一種常見的交通工具超速監(jiān)控手段,它借助雷達(dá)技術(shù)可以準(zhǔn)確測(cè)量車輛的速度。它的基本原理是利用雷達(dá)波束的多普勒效應(yīng)來(lái)測(cè)量目標(biāo)物的速度。 雷達(dá)測(cè)速設(shè)備通常由一個(gè)發(fā)射器
2024-02-03 14:10:35341
 電子發(fā)燒友App
電子發(fā)燒友App


 。怎么樣,連小學(xué)生都聽得懂吧?
。怎么樣,連小學(xué)生都聽得懂吧?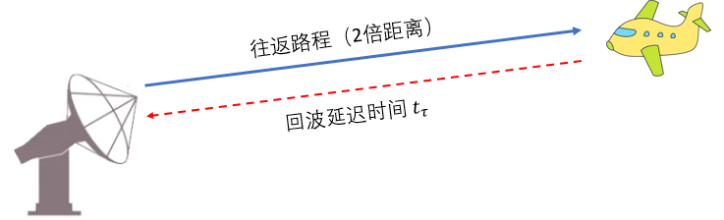
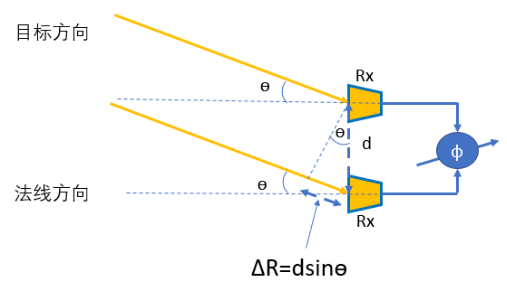

 ,那么回波信號(hào)相比起發(fā)射信號(hào)來(lái)說,相位差為
,那么回波信號(hào)相比起發(fā)射信號(hào)來(lái)說,相位差為
 。
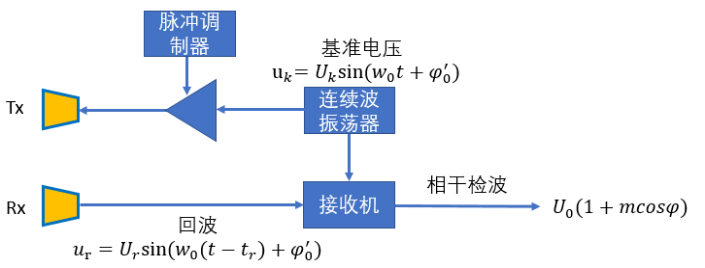
。 。其中,U0 是連續(xù)振蕩的基準(zhǔn)電壓經(jīng)過檢波后的輸出,它是一直存在的,而
。其中,U0 是連續(xù)振蕩的基準(zhǔn)電壓經(jīng)過檢波后的輸出,它是一直存在的,而 則表示回波和基準(zhǔn)電壓做相干檢波后,疊加上去的信號(hào)分量,并且它只存于回波信號(hào)到來(lái)的期間。
則表示回波和基準(zhǔn)電壓做相干檢波后,疊加上去的信號(hào)分量,并且它只存于回波信號(hào)到來(lái)的期間。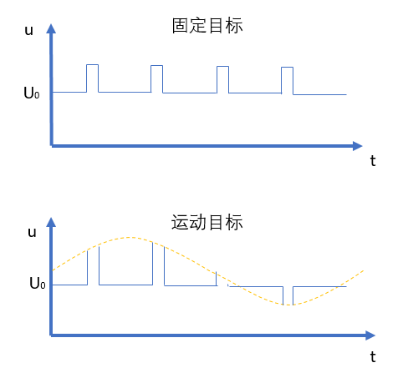


 ,即
,即 。
。






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論