1MPU6050初始化①初始化IIC接口。②初始化MPU6050。由電源管理寄存器1(0X6B)控制。③設置角速度傳感器和加速度傳感器的滿量程范圍。由陀螺儀配置寄存器(0X1B)和加速度傳感器配置
2022-02-10 06:01:30
MPU6050 DPM移植到Air724/Air800 Lua語言MPU6050MPU6050是一個三軸加速度+三軸陀螺儀的六軸傳感器,自帶DMP數字運動處理器,可以減少MCU復雜的融合演算數據、感
2021-08-20 07:10:36
最近剛好在學習MPU6050傳感器,想從原理到應用整個過程進行總結,查閱了無數資料,也借鑒了很多博主的知識內容,我會用最通俗易懂的語句,從原理到模塊初始化再到數據處理,一一進行解釋,通過耐心的學習
2022-02-10 06:28:04
一.簡介MPU6050 是 InvenSense 公司推出的整合性 6 軸運動處理組件,其內部整合了 3 軸陀螺儀和 3 軸加速度傳感器,并且含有一個IIC 接口, 可用于連接外部磁力傳感器,并利用
2022-02-10 06:59:34
一、MPU6050簡介MPU6050是InvenSense公司推出的全球首款整合性6軸運動處理組件,內帶3軸陀螺儀和3軸加速度傳感器,并且含有一個第二IIC接口,可用于連接外部磁力傳感器,利用自帶
2022-02-10 06:15:57
fifo 有助于降低系統功耗7 高達400khz 的iic通信接口8 超小封裝尺寸 4×4×0.9mm總結來說 就是小且功能強大主要信號腳int 輸出腳cs片選腳ad0 設置地址的scl sda 主iic接口aux_cl aux_da 從iic接口mpu6050 6軸傳感器初始化流程
2022-02-10 06:49:59
,總會有忘記的,所以來寫這本書的隨手筆記,記錄重點、易忘點。該博客可以當做字典,也可以當做筆記。目前內容:MPU6050六軸傳感器 一、什么是MPU6050?: MP...
2022-02-10 07:15:46
MPU6050初始化失敗osDelay(1000);//上電uint8_t mpu_ok = MPU_init();uint8_t cnt = 0;while(cnt++ < 3&
2022-02-10 06:37:37
單片機問題總結:MPU6050的DMP模塊初始化放在RTOS線程啟動之前文章目錄單片機問題總結:MPU6050的DMP模塊初始化放在RTOS線程啟動之前問題復現問題總結問題解決問題復現
2022-02-10 06:26:39
///////////////////////////////////////////移植原子哥的MPU6050的DMP程序到TM4C1294處理器,進行初始化時,程序在mpu_init會出
2019-06-25 04:35:55
2.4 STM32 MPU6050數據獲取(IIC + DMP)本篇文章主要針對廉價的MPU6050模塊。我們這里完成了MPU6050的數據獲取、零偏自動設置、溫漂抑制。這里提供源碼工程文件,供大家
2021-08-09 07:17:09
MPU6050 加速度傳感器模塊
2023-03-28 13:06:19
開發個產品,初次使用MPU6050傳感器,數據就是讀不出來,剛開始可以讀出來,不知道哪里出問題了,數據就是讀不出來,初始化都完成不了。求助。
2019-05-10 04:15:44
.代碼說明1.MPU6050引腳配置2.MPU6050模塊寫數據與命令函數3.MPU6050模塊初始化函數4.MPU6050模塊基礎功能函數七.資料獲取一.實現功能上電后OLED0.96實時顯示AX,AY,AZ三軸加速度 GA,GY,GZ三軸角速度二.硬件清單OLED0.96模塊
2022-02-10 06:58:54
原子哥,用你給的ALIENTEK MiniSTM32 ATK-MPU6050六軸傳感器模塊例程和上位機做測試,上位機有收到數據,但是數據很亂,我使勁晃動MPU6050傳感器,波形,姿態都沒有任何反應,還有這協議怎么用呀?
2019-09-22 21:42:31
現在我MPU6050自檢的做法是,保存處于絕對水平面上的AD值,這樣以后自檢的時候不用處于水平面也是得到相對準確的數據。但是我發現MPU6050在上電初始化的時候,如果處于垂直就初始化失敗,是什么原因導致的呢?或者如何解決。謝謝!
2019-04-09 06:36:19
。MPU6050 內部整合了 3 軸陀螺儀和 3 軸加速度傳感器,并且含有一個第二 IIC 接口,可用于連接外部磁力傳感器,并利用自帶的數字運動處理器(DMP: Digital Motion Process...
2022-02-10 08:01:29
mpu6050是一個六軸傳感器包括三軸陀螺儀和三軸加速度,分別可以測得三軸的角速度、加速度。但是一般傳感器的原始數據都不能直接直接拿來用,都需要濾波和姿態融合解算。對于初學者來說卡爾曼濾波和姿態融合
2022-02-10 06:25:15
寫在最前面,這篇博客寫到的姿態解算是由DMP硬件完成的,介紹了底層驅動,重點例舉了MPU6050的初始化函數,加速度計,陀螺儀原始數據的讀取函數,設置傳感器的量程范圍,采樣頻率函數。下一篇博客,我會
2022-02-10 07:46:19
文章目錄前言一、MPU6050是什么?二、使用步驟1.引入庫2.讀入數據總結前言一、MPU6050是什么?MPU6050是一款性價比很高的陀螺儀,可以讀取X Y Z 三軸角度,X Y Z 三軸加速度
2022-02-10 07:22:09
1.請問下MPU6050的溫度傳感器的溫度是怎樣計算的?2.Temperature = 36.53 + regval/340regval-------讀出來的值(int型)和 T= (寄存器讀出來
2018-05-23 13:38:22
MPU6050簡介什么是MPU6050MPU6050的特點MPU6050框圖MPU6050初始化MPU6050—DMP使用介紹MPU6050—DMP使用DMP驅動庫驅動代碼硬件連接
2022-02-10 07:02:46
最近學習接觸了MPU6050,它是全球首例整合性6軸運動處理組件,集合了三軸陀螺儀和三軸加速度計的器件,它不僅能夠用于測試角度,它還集合了許多模塊,列如DMP,可以用來充當自平衡小車及四軸飛行器
2015-07-19 17:15:40
1.簡介MPU6050是InvenSense 公司的 一款高性能三軸加速度+三軸陀螺儀的六軸傳感器芯片, 該芯片內部整合了 3 軸陀螺儀和 3 軸加速度傳感器,并可利用自帶的數字運動處理器(DMP
2021-08-04 07:27:16
一、MPU6050簡介1.什么是MPU6050?MPU6050是InvenSense公司推出的全球首款整合性6軸運動處理組件,內帶3軸陀螺儀和3軸加速度傳感器,并且含有一個第二IIC接口,可用
2021-08-09 07:25:57
時,MPU-60X0提供完整的9軸運動融合輸出到其主I2C或SPI端口(SPI僅在MPU-6000上可用)。MPU6050, 該芯片內部集成一個三軸加速度傳感器和一個三軸陀螺儀,并且自帶 DMP(Digital M...
2022-02-11 07:46:16
}/**********************************************************///函數名稱:void MPU6050Init//入口參數:無//出口參數:無//函數功能:MPU6050初始化
2018-06-26 06:30:10
:(11條消息) STM32—驅動六軸MPU6050輸出歐拉角_肥宅快樂博客-CSDN博客_mpu6050歐拉角)1,bsp_mpuiic(用來與陀螺儀進行IIC通信,IIC的底層驅動:之后的MPU操作都是通過此driver)(1)IO方向設置(用來管理SDA為輸入還是輸出)在IIC中用得
2022-02-10 07:14:08
文章目錄引言簡述一下mpu6050和stm32的一些坑吧MPU6050 I2C讀寫MPU6050 初始化讀取內部溫度傳感器讀取陀螺儀DMP的移植讀取三軸角度引言最近玩了IMU模塊,看了很多的博客
2022-02-10 07:35:27
mpu6050向arduino傳輸數據,matlab通過串口再讀取傳感器數據。由于每次啟動傳感器會重新校準,導致每次傳感器測得同一姿態、同一位置x y兩個方向角的初始值都不一樣,這就造成很大的麻煩
2021-08-05 11:00:28
過程 -------------------------------------------------------------可能有些說明不對的地方,請大家一定要提出來提出來,共同學習 .共同進步.–>>>本文章HAL庫編寫MPU6050輸出六軸原始數據,移植DMP輸出自身姿態角程序鏈接程序鏈接程序鏈接目錄一、mpu6050的通信方式二、CubeMX
2022-02-10 07:01:20
MPU6050六軸傳感器,可以同時檢測三軸加速度、三軸陀螺儀(三軸角速度)及溫度,可以用到平衡車、四軸飛行器、手機、運動手環等等設備之中,其中的三維坐標方向為三軸加速度方向,在三維坐標的各個方向形成
2022-02-10 07:50:58
mpu6050
2016-05-26 12:21:09
ATK-MPU6050六軸傳感器模塊程序源碼
2016-05-26 12:22:37
if(mpu_init()==0)//初始化MPU6050{ res=mpu_set_sensors(INV_XYZ_GYRO|INV_XYZ_ACCEL);//設置所需要的傳感器 if(res)return 1;res=mpu_configure_fifo(INV_XYZ_G
2022-02-10 06:47:29
起因最近在學習stm32開發板,最近學習到了需要IIC通信的MPU6050六軸傳感器,看了正點原子的例程,發現其中有很多位操作不是很理解。經過補習了一番C語言,總結了一些位操作的知識。接下來直接貼
2022-02-10 06:06:28
MPU6050各個方面的介紹,這篇博文[MPU6050開發 – 基本概念簡介](https://blog.csdn.net/qq_29350001/article/details/78603714)GY-521MPU6050 是三維角度傳感器,為全球首例集成六軸傳感器的運動處理組件。這里的六軸,代表的是它
2022-02-10 07:45:15
前言MPU6050 是一個很好玩傳感器,在四軸、體感、計步等應用領域都能看到這小芯片的影子,其內部的結構、功能十分豐富,可玩度非常高。同時,對傳感器采集到的數據進行分析還能得到許多信息,但此時的一些
2018-05-05 18:02:51
STM32 控制MPU6050之使用說明 mpu6050是陀螺儀、加速計和一個可擴展的傳根器RM-MPU-3000A.pdf ATK-MPU6050六軸傳感器模塊使用說明(Mini V3)_AN1507.pdf
2018-07-06 02:25:47
STM32 控制MPU6050之使用說明 mpu6050是陀螺儀、加速計和一個可擴展的傳根器RM-MPU-3000A.pdf ATK-MPU6050六軸傳感器模塊使用說明(Mini V3)_AN1507.pdf
2018-07-02 08:05:23
STM32野火平衡小車之如何搭建之PID與MPU6050初始化
2021-10-13 06:04:02
MPU6050六軸傳感器測量物體姿態角一、姿態角(歐拉角)基本概念二、代碼實現功能描述三、接線圖五、完整代碼六、代碼運行結果七、需要注意的地方一、姿態角(歐拉角)基本概念物體在空間中的姿態可以用
2022-02-10 07:42:40
一、問題stm32c8t6移植MPU6050總是初始化失敗,在自檢測試通不過,返回8,網上的解決方法是將MPU6050放置水平,或者握緊杜邦線,但是怎么都不好使。二、解決方法查找到一篇文章說是晶振
2022-02-10 07:43:52
PLL作為時鐘源,以獲得更高精度的時鐘。同時,使能角速度傳感器和加速度傳感器,這兩個操作通過電源管理寄存器 2(0X6C)來設置,設置對應位為 0 即可開啟。至此,MPU6050 的初始化就完成
2020-06-12 15:16:29
今天測試一下6軸加速度傳感器MPU6050,主要驗證庫文件能否兼容我的模塊。首先打開在線編程公有庫找到MPU6050并復制到自己的私有庫里。然后新建一個工程:打開工程后在工程中添加已經保存的庫
2017-06-12 23:19:24
的振蕩器。此次使用MPU6050傳感器模塊,模塊尺寸也很小巧,只有13mmx20mm大小,模塊上已經焊接好MPU6050芯片以及必要的外圍電路。圖1MPU6050六軸陀螺儀傳感器二、硬件連接設計COF
2022-04-11 01:08:47
一、MPU6050介紹 首先我們了解下MPU6050模塊 MPU6050 為全球首例集成六軸傳感器的運動處理組件,內置了運動融合引擎,用于手持和桌面的應用程序、游戲控制器、體感遙控以及
2023-03-28 14:46:13
我們使用DMP庫對MPU6050初始化并且通過DMP中的庫函數讀取加速度值和陀螺儀值顯示在LCD上2、實驗前準備使用DMP庫需要在MPU官方下載固件并將下面六個導入工程并且在固件庫中需要進行一定的設定。在inv_mpu.c文件中預留有調用文件的接口,需要我們提前設定一下首先#define MPU
2021-08-16 06:28:06
中直觀地看到 6 軸傳感器的位置變化。該代碼中使用的 6 軸傳感器是 InvenSense MIPU 6050, 與 I2C 協議通信。 初始化和控制界面功能功能功能可以在 MPU 6050.c 功能
2023-08-30 07:51:52
中直觀地看到 6 軸傳感器的位置變化。該代碼中使用的 6 軸傳感器是 InvenSense MIPU 6050, 與 I2C 協議通信。 初始化和控制界面功能功能功能可以在 MPU 6050.c 功能
2023-08-23 06:03:18
最近做東西用到了MPU6050這個3軸重力加速度+3軸角速度傳感器,雖然使用庫函數正確的讀取到并算出了要用的值,但在加速度傳感器和角速度傳感器的功能上與伙伴產生了分歧。關于重力加速度和角速度傳感器
2015-08-20 08:54:02
最近在實驗mpu6050,遇到2個問題。1、在初始化之后,讀取mpu6050的地址時,會出現地址為0的情況;2、第一次讀取地址為0x68時,讀取數據全為0,然后Reset后會出現一組數據。每隔1s
2016-08-09 09:32:59
摘要:使用小熊派開發板,通過硬件IIC與MPU6050六軸傳感器模塊通信,完成相應寄存器配置,成功獲取陀螺儀、加速度計數據。本問主要講述使用小熊派開發板+MPU6050六軸傳感器,獲取加速度計以及
2022-02-10 07:00:37
一下,如果要移植Mpu6050的DMP,從底層到應用層大概分為這幾個步驟:1. 底層IIC驅動編寫。2. Mpu6050初始化及配置函數層。 3. 硬件驅動程序通過I2C與傳感器通信。4. Dmp應用層。首先要熟悉在標準庫下的移植,那么下面的問題只是一些避免入坑的注意事項。二、面臨的問題及解決方法HA
2022-02-10 06:08:06
之前介紹過,項目的第一項操作是要采集帕金森病人的震顫數據,整體架構圖如下:這里采用的是一款基于MPU6050的JY61型號傳感器,好處在于內置卡爾曼濾波,直接可以通過串口輸出六軸數據,大大方便了編程
2021-12-17 07:00:42
基于戰艦V3的MPU6050六軸陀螺儀實驗陀螺儀的分類3軸傳感器指的是3軸的加速度,根據這個加速度我們解算出XY兩軸的角度。6軸傳感器指的是3軸的加速度和3軸角速度,根據這兩個數據我們解算出XYZ三
2022-02-10 06:53:43
如何使用DMP庫對MPU6050進行初始化呢?怎樣通過DMP中的庫函數讀取加速度值和陀螺儀值并顯示在LCD上呢?
2021-11-17 08:06:38
如何對基于stm32的mpu6050傳感器進行測試呢?有哪些測試步驟呢?
2021-11-18 06:59:29
mpuiic.c文件,修改IIC初始化函數 void MPU_IIC_Init(void),將要初始化的IO口改為自己的4、進入mpuiic.h文件,修改下面幾個宏定義5、修改MPU6050的IIC地址一般經過上面幾個步驟就已經移植成功了,不夠有時候會出現MPU6050的DMP模式初始化失敗的情況
2022-02-10 07:55:52
在做飛行器的時候是怎么解決mpu6050自檢不準確的,如果mpu6050傾斜這放著自檢,初始化完成后計算出的幾個姿態也會不準確,網上找了一些資料說是要加磁阻才行……但是我看好多市面上賣的四軸都是用
2019-06-14 04:35:59
如題,最近在使用MPU6050請教一下用過的老司機是怎么消除傳感器各軸之間的耦合誤差的,也就是消除只有一個軸旋轉時對其他軸的影響。
2019-05-16 03:18:17
mpu6050詳細源碼,配有電路圖以及初始化C語言程序。詳細的mpu6050中文資料!
2016-02-18 11:53:20 98
98 MPU6050的使用介紹。。。ATK-MPU6050六軸傳感器模塊使用說明(Mini V3)_AN1507。
2016-03-21 10:09:3767 已經實現兩路,邏輯分析儀測試時間為3-4ms,只需調用初始化和讀取數據就可以提取MPU6050多路數據
2017-01-19 21:49:1827 MPU6050(硬件IIC)MPU6050(硬件IIC)
2017-04-02 16:29:3071 為避免糾纏于電路細節,我們直接使用集成的MPU6050模塊。MPU6050的數據接口用的是I2C總線協議,因此我們需要Wire程序庫的幫助來實現Arduino與MPU6050之間的通信。請先確認你的Arduino編程環境中已安裝Wire庫。
2017-11-07 14:25:06 6954
6954 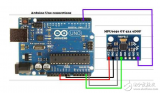
MPU6050是運動處理傳感器,它集成了3軸陀螺儀,3軸加速度計以及DMP,其中的DMP是一個可通過IIC接口擴展的數字運動處理器。
2017-11-07 14:50:1312890 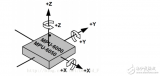
本文為大家分享了mpu6050六軸傳感器模塊驅動程序源代碼,STM32F1讀取MPU6050的加速度和角度傳感器數據的初始化步驟,以及MPU6050DMP初始化函數、DMP姿態解算后的俯仰角、橫滾角和航向角。
2017-12-11 14:26:5235036 
本文介紹了mpu6050和mpu3050有什么不同和相同。分別介紹了mpu6050和mpu3050基礎以及特點,mpu3050是三軸陀螺傳感器,MPU6050內部整合了3軸陀螺儀和3軸加速度傳感器。
2017-12-11 15:41:5534849 mpu6050常用作提供飛控運行時的姿態測量和計算。本文首先介紹了MPU6050姿態解算的原理,其次詳細的介紹了mpu6050姿態解算程序。
2018-03-09 09:15:2441958 最近,被安排調試MPU6050 模塊,之前從沒接觸過相關MEMS 傳感器, 所以感覺一頭霧水。幸好還有網絡, 還有強大的兄弟團的支持。不過, 很可惜,網上大部分資料只是簡單教你如何配置MPU6050
2019-07-24 16:27:0732 本文檔的主要內容詳細介紹的是MPU6050陀螺儀的詳細C語言程序合集免費下載包括了:陀螺儀MPU6050 IIC 測試程序和時鐘初始化,端口初始化,串口1 初始化,中斷初始化,看門狗初始化,延時函數,長延時函數,窗口提前喚醒中斷,主函數等
2019-07-30 17:22:4866 最近接觸MPU6050 ,下面對6050 初始化配置做一點總結,如有錯誤還望不吝賜教在初始化MPU6050 前,先確定單片機與MPU6050 通信是否正常, 根據手冊MPU6050 采用的是400kbit/s 的IIC。
2019-08-01 16:55:3588 本文檔的主要內容詳細介紹的是MPU6050傳感器的電路原理圖免費下載。
2019-08-29 08:00:00106 本文檔的主要內容詳細介紹的是MPU6050傳感器的四元數歐拉角程序免費下載。
2019-08-30 17:29:5323 本文檔的主要內容詳細介紹的是MPU6050傳感器的源代碼合集免費下載。
2020-01-03 16:22:2945 本文檔的主要內容詳細介紹的是MPU6050傳感器的電路原理圖免費下載。
2020-05-29 08:00:0037 MPU6050專用穩壓模塊的原理圖設計
2021-11-07 19:21:0037 MPU6050簡介什么是MPU6050MPU6050的特點MPU6050框圖MPU6050初始化MPU6050—DMP使用介紹MPU6050—DMP使用DMP驅動庫驅動代碼硬件連接
2021-12-06 11:51:1167 mpuiic.c文件,修改IIC初始化函數 void MPU_IIC_Init(void),將要初始化的IO口改為自己的4、進入mpuiic.h文件,修改下面幾個宏定義5、修改MPU6050的IIC地址一般經過上面幾個步驟就已經移植成功了,不夠有時候會出現MPU6050的DMP模式初始化失敗的情況
2021-12-06 11:51:1115 移植正點原子mpu6050代碼,總是MPU6050初始化失敗解決首先觀察正點原子MPU6050代碼,發現它在讀取MPU6050數據的同時,還將數據通過串口發送給上位機進行調試,而我們移植
2021-12-06 11:51:1238 1 MPU6050初始化①初始化IIC接口。②初始化MPU6050。由電源管理寄存器1(0X6B)控制。③設置角速度傳感器和加速度傳感器的滿量程范圍。由陀螺儀配置寄存器(0X1B)和加速度傳感器
2021-12-06 12:06:0728 MPU6050初始化失敗osDelay(1000); //上電uint8_t mpu_ok = MPU_init();uint8_t cnt = 0;while
2021-12-06 12:36:0613 一、問題stm32c8t6移植MPU6050總是初始化失敗,在自檢測試通不過,返回8,網上的解決方法是將MPU6050放置水平,或者握緊杜邦線,但是怎么都不好使。二、解決方法查找到一篇文章說是
2021-12-06 12:36:0618 文章目錄引言簡述一下mpu6050和stm32的一些坑吧MPU6050 I2C讀寫MPU6050 初始化讀取內部溫度傳感器讀取陀螺儀DMP的移植讀取三軸角度引言最近玩了IMU模塊,看了很多的博客
2021-12-06 12:36:0714 MPU6050六軸傳感器,可以同時檢測三軸加速度、三軸陀螺儀(三軸角速度)及溫度,可以用到平衡車、四軸飛行器、手機、運動手環等等設備之中,其中的三維坐標方向為三軸加速度方向,在三維坐標的各個方向形成
2021-12-06 13:21:1011 if(mpu_init()==0) //初始化MPU6050 { res=mpu_set_sensors(INV_XYZ_GYRO|INV_XYZ_ACCEL);//設置所需要的傳感器 if(res)return 1; res=mpu_configure_fifo(INV_XYZ_G
2021-12-06 13:21:119 @[TOC]STM32初始化MPU6050低功耗 中斷喚醒STM32初始化MPU6050低功耗 中斷喚醒代碼如下: 已親自測試(2021.2.4) (以下代碼 采樣率是20Hz)低功耗中斷喚醒 記得
2021-12-06 13:36:1320 fifo 有助于降低系統功耗7 高達400khz 的iic通信接口8 超小封裝尺寸 4×4×0.9mm總結來說 就是小且功能強大主要信號腳int 輸出腳cs 片選腳ad0 設置地址的scl sda 主iic接口aux_cl aux_da 從iic接口mpu6050 6軸傳感器初始化流程
2021-12-06 13:51:1218 單片機問題總結:MPU6050的DMP模塊初始化放在RTOS線程啟動之前文章目錄單片機問題總結:MPU6050的DMP模塊初始化放在RTOS線程啟動之前問題復現問題總結問題解決問題復現
2021-12-06 14:06:0810 關于調試 MPU6050 DMP初始化過不去 總是顯示mpu_set_sensor complete 的解決辦法
2021-12-06 14:36:1316 圖五. 接線六.代碼說明1. MPU6050引腳配置2. MPU6050模塊寫數據與命令函數3. MPU6050模塊初始化函數4. MPU6050模塊基礎功能函數七.資料獲取一. 實現功能上電后OLED0.96實時顯示AX,AY,AZ三軸加速度 GA,GY,GZ三軸角速度二. 硬件清單OLED0.96模塊
2021-12-06 16:06:0929 一下,如果要移植Mpu6050的DMP,從底層到應用層大概分為這幾個步驟:1. 底層IIC驅動編寫。2. Mpu6050初始化及配置函數層。 3. 硬件驅動程序通過I2C與傳感器通信。4. Dmp應用層。首先要熟悉在標準庫下的移植,那么下面的問題只是一些避免入坑的注意事項。二、面臨的問題及解決方法HA
2021-12-06 16:06:1023
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論