 電子發(fā)燒友App
電子發(fā)燒友App


磁傳感器是什么?
看上去神秘的“磁”,其實離我們并不遙遠,時刻環(huán)繞著我們。因為,地球本身就可以看成一個天然的巨大磁體,叫做地磁場。如果把地磁場簡化為一個條形磁鐵的話,那么地磁南極實際是在地理北極附近,而地磁北極實際是在地理南極附近。這兩個磁極的假設磁軸并不是和地球的自轉軸是重合的,而是有大約成11.5度的傾斜角度。地磁場數(shù)值從0.4高斯到0.6高斯,其強度與方向也隨地點而變化。
所謂磁傳感器,就是把磁場、放射線、壓力、溫度、光等因素作用下引起敏感元件磁性能的變化轉換成電信號。現(xiàn)代工業(yè)和電子產(chǎn)品中應用中,磁傳感器最廣泛的是以感應磁場強度來測量電流、位置、方向等物理參數(shù)。在現(xiàn)有技術中,有許多不同類型的磁傳感器,最常見的是采用霍爾(Hall)元件、各向異性磁電阻(Anisotropic Magnetoresistance, AMR)、巨磁電阻(Giant Magnetoresistance, GMR)、隧道磁阻傳感器(Tunnel Magnetoresistance, TMR)為核心的傳感器。
什么是AMR磁阻傳感器?
某些金屬或半導體在遇到外加磁場時,其電阻值會隨著外加磁場的大小發(fā)生變化,這種現(xiàn)象叫做磁阻效應,電阻的變化量叫做磁阻。
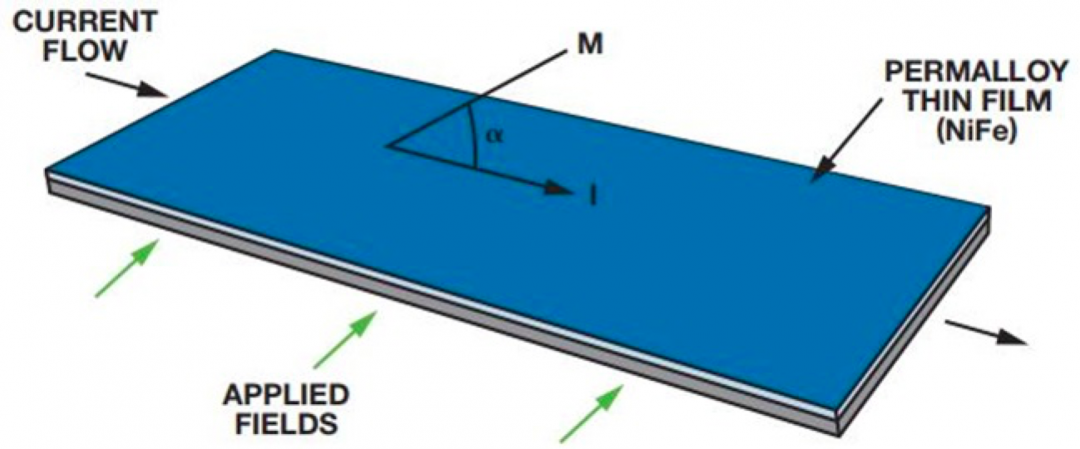
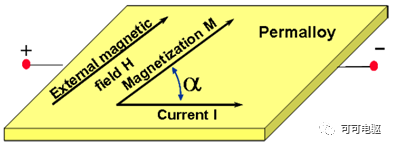
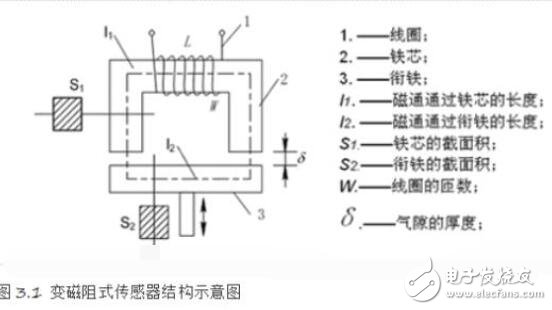
1857年,Thomson發(fā)現(xiàn)坡莫合金的的各向異性磁阻效應。對于有各向異性特性的強磁性金屬, 磁阻的變化是與磁場和電流間夾角有關的。我們常見的這類金屬有鐵、鈷、鎳及其合金等。當外部磁場與磁體內建磁場方向成零度角時, 電阻是不會隨著外加磁場變化而發(fā)生改變的;但當外部磁場與磁體的內建磁場有一定角度的時候, 磁體內部磁化矢量會偏移,薄膜電阻降低, 我們這種特性稱為各向異性磁電阻效應(Anisotropic Magnetoresistive Sensor,簡稱AMR)。磁場作用效果下圖。
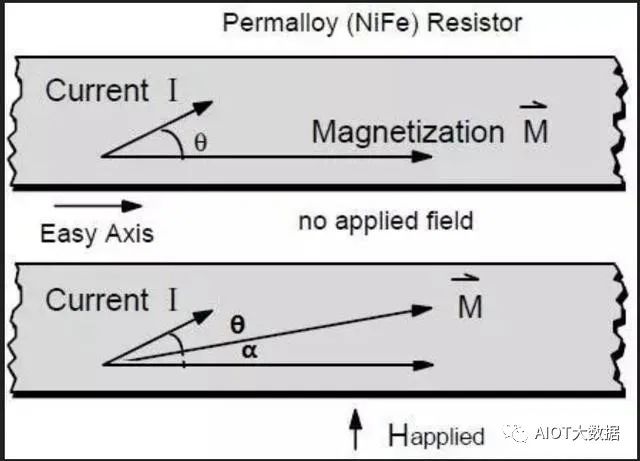
坡莫合金的AMR效應
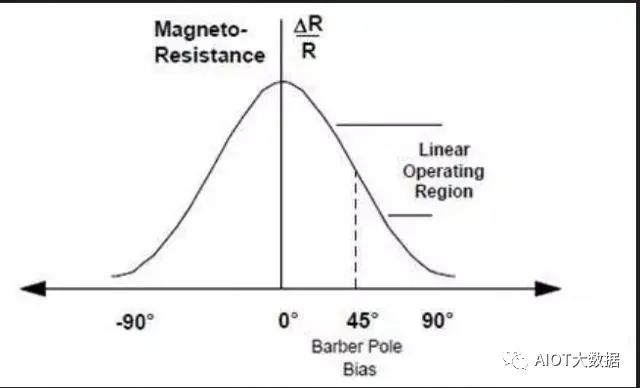
磁阻變化值與角度變化的關系
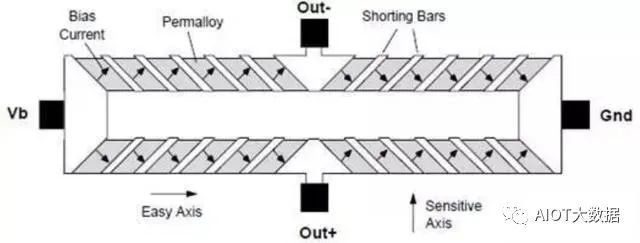
薄膜合金的電阻R就會因角度變化而變化,電阻與磁場特性是非線性的,且每一個電阻并不與唯一的外加磁場值成對應關系。從上圖中,我們可以看到,當電流方向與磁化方向平行時,傳感器最敏感,在電流方向和磁化方向成45度角度時,一般磁阻工作于圖中線性區(qū)附近,這樣可以實現(xiàn)輸出的線性特性。
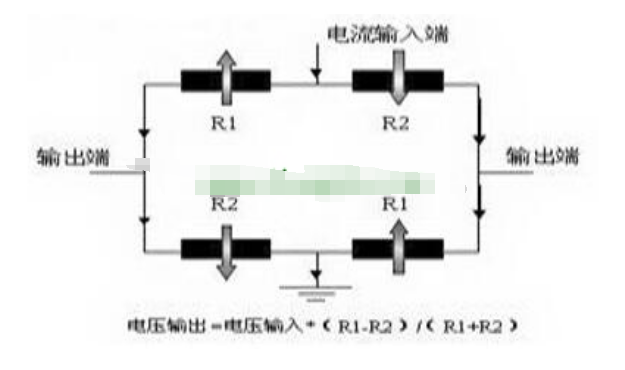
AMR磁傳感器的基本結構由四個磁阻組成了惠斯通電橋。其中供電電源為Vb,電流流經(jīng)電阻。當施加一個偏置磁場H在電橋上時,兩個相對放置的電阻的磁化方向就會朝著電流方向轉動,這兩個電阻的阻值會增加;而另外兩個相對放置的電阻的磁化方向會朝與電流相反的方向轉動,該兩個電阻的阻值則減少。通過測試電橋的兩輸出端輸出差電壓信號,可以得到外界磁場值。
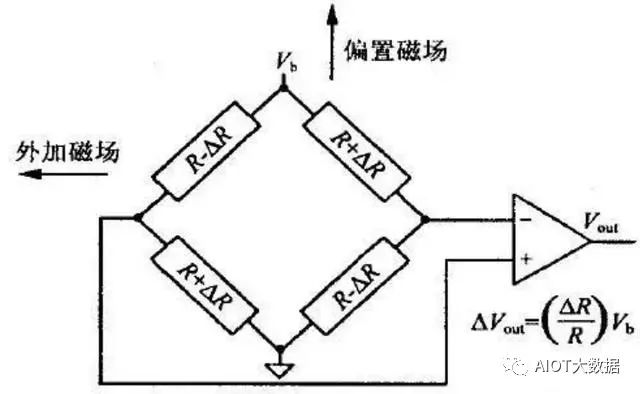
AMR磁阻傳感器等效電路
AMR磁阻傳感器如何“施展拳腳”?
各向異性磁阻傳感器的測量范圍正好是以地球磁場分布范圍為中心,最適合工作在地球磁場環(huán)境下的磁傳感器。其采用常見的坡莫合金,具有精度高,體積小,穩(wěn)定性好等優(yōu)點,且工藝上只需一層磁性薄膜,工藝簡單,成本低,不需要昂貴的制造設備,適合批量生產(chǎn)和更迎合消費類電子市場的需求。
AMR磁阻傳感器可以很好地感測地磁場范圍內的磁場低于1高斯。傳感器可用來檢測一些鐵磁性物體如飛機、火車、汽車。其它應用包括磁羅盤、旋轉位置傳感、電流傳感、鉆井定向、線位置測量、偏航速率傳感器和虛擬實景中的頭部軌跡跟蹤。
導航功能
磁傳感器最初是利用其磁性來作為航海指南針。磁傳感器和加速度計可以組成電子羅盤,是測量方位角比較經(jīng)濟的一種電子儀器。如今電子羅盤廣泛應用于汽車和手持電子羅盤,手表,手機,對講機,雷達探測器,望遠鏡,探星儀,穆斯林麥加探測器(穆斯林鐘),手持 GPS 系統(tǒng),尋路器,武器/導彈導航(航位推測),位置/方位系統(tǒng),安全/定位設備,汽車、航海和航空的高性能導航設備,電子游戲機設備等需要方向或姿態(tài)顯示的設備。
- 車輛管制功能
由于地球是個巨大的磁場,當車輛這類大磁體通過時,會引起地磁場局部的擾動。磁傳感器可以探測到車輛的存在,行駛方向,行駛速度,車輛大小等。因此,地下車庫可以計算剩余車位數(shù)量,可以監(jiān)測道路車流量情況,為人們的出行提供道路和停車信息。在當前大力發(fā)展的“智慧城市”中,將會有很重要的作用!
地磁探測
各向異性磁阻傳感器可以用來辨別埋藏物質的。磁阻傳感器是利用薄膜合金遇到磁場會產(chǎn)生磁阻值變化的性質,當電橋遇到不同強度的磁場時會產(chǎn)生不同的電壓輸出,將磁性信號轉變?yōu)殡娦盘枴C鎸γ懿加诔鞘懈鱾€角落的地下管線錯綜復雜,在施工過程中經(jīng)常出現(xiàn)打漏管線情況,進而造成漏水、漏氣、停電等事故,該應用有現(xiàn)實意義。
協(xié)作機器人是指在共享空間中與人類互動或近距離地與人一起安全工作以生產(chǎn)東西的機器人。1978年,日本廣島一家工廠的切割機器人在切鋼板時將一名值班工人當作鋼板操作,導致了悲劇的發(fā)生,自那時起工業(yè)機器人的安全性就成為了所有機器人研發(fā)人員一直在努力解決的問題。而從1996年世界上第一臺商業(yè)化人機協(xié)作機器人WAM機械臂于美國誕生以來,又一個核心問題始終困擾著研發(fā)者——如何在實現(xiàn)安全化的同時,提升生產(chǎn)效率并降低成本。
?
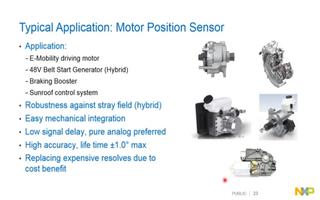
作為機電系統(tǒng)的一種外在表現(xiàn)形式,工業(yè)協(xié)作機器人的機械臂通常通過變速箱連接到電機,而要實現(xiàn)電機的精確控制和高效換向,高分辨率電流和旋轉位置信息至關重要。一般而言,在基于旋變器的系統(tǒng)中,分辨率和精度可能非常高,但終端解決方案可能價格昂貴且體積較大;無傳感器方案也可用于檢測反電動勢電流,而且還能降低傳感器重量和成本,但是電機啟動性能可能是個問題;利用三個霍爾效應傳感器檢測電機磁體的位置則通常用于對成本敏感的應用中,由于需要監(jiān)控三個信號,往往會產(chǎn)生空間和安裝難題。作為工業(yè)自動化領域半導體方案的專業(yè)廠商,ADI公司提供基于異性磁阻(AMR)技術的角度傳感器,借助ARM傳感器,不僅可實現(xiàn)高角度精度,而且可獲得非常小的傳感器子系統(tǒng),并且能夠在電機總成內定位傳感器。
?什么是AMR技術?
基于AMR理念的傳感器的材料電阻率取決于相對于電流方向的磁化方向。該傳感器通常沉積為薄膜透磁合金(磁性鐵鎳合金)。AMR傳感器在飽和狀態(tài)下工作,因此外部磁場對電阻變化起決定作用。外部磁場和電流方向平行時電阻最大,施加磁場與載流透磁合金的平面垂直時電阻最小。兩個獨立的惠斯登電橋配置以彼此呈45°的方式排列時,可實現(xiàn)角度傳感器,其正弦和余弦輸出取決于外部磁場方向。此配置可提供具有180°絕對測量范圍的傳感器。
AMR工作原理
在當今的位置檢測技術中,各向異性磁阻(AMR)薄膜材料變得日益重要。相比傳統(tǒng)技術,磁阻(MR)位置測量具有多種優(yōu)勢。可靠性、精度和整體魯棒性是推動磁阻檢測技術快速發(fā)展的主要因素。低成本、相對較小的尺寸、非接觸式操作、寬溫度范圍、對灰塵和光的不敏感性、寬磁場范圍,這些特性共同造就出一種魯棒的傳感器設計。
?決定機器人精度和可重復性規(guī)格的因素
當機器人處于工作狀態(tài)時,電機旋轉速度往往非常快,相比之下,機械臂的運動速度要慢得多。位置傳感器通常安裝在電機本身上,送回機器人控制器的關節(jié)角度解讀結果會顯示關節(jié)的位置,然后從電機角度傳感器直接解釋,或在機械臂一側進行解釋。在機械臂一側的情況下,電機角度傳感器將被用來控制電機速度。還有一個安全制動器,當斷電時它會將機械臂固定在適當?shù)奈恢茫悦庹麄€機械臂倒塌。
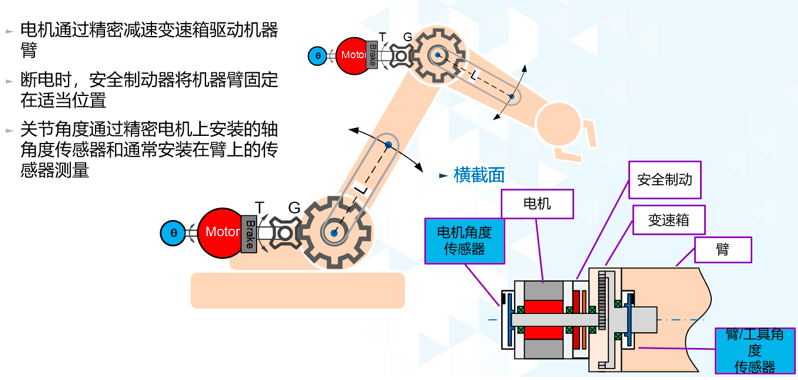
工業(yè)機器人架構
可重復性是機器人設計中最常使用的術語之一,一旦機械臂始終回到同一位置,用戶就可以在任務開始時對其進行校準,然后便知道它會保持一致。人們經(jīng)常使用精度一詞代替可重復性,它是重復性任務(例如機器人技術)中最重要的規(guī)格和關鍵參數(shù)之一。具有高重復性的系統(tǒng)經(jīng)校準后可實現(xiàn)很高的絕對精度。
了解可重復性規(guī)格和機器人的作用范圍之后,我們就可以推斷旋轉編碼器的規(guī)格。伺服電機上和機器人關節(jié)上一般都有編碼器,變速箱通過提高扭矩,將電機的高速轉動轉換成受控的低慣性臂運動。由于機器人中有多個關節(jié),而且要考慮機械公差,因此組合多個關節(jié)以實現(xiàn)機器人在傳感器下的總體作用范圍時,關節(jié)的性能應比目標角度重復性規(guī)格更高。
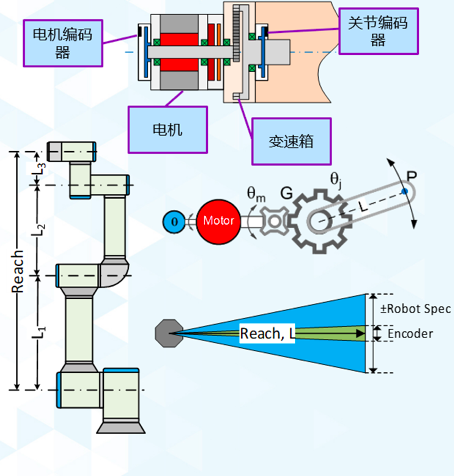
機器人架構中的編碼器
具備高可靠性&精確位置信息的 AMR傳感器
ADI可提供ADA4571 AMR角度傳感器形式的位置傳感器以用于成熟的磁編碼器解決方案。借助高精度位置反饋信息,ADA4571可提高電機換向效能,改進對扭矩和速率性能的控制,在低轉速應用中尤其如此。該款傳感器還支持最高50,000 RPM的電機轉速,而角度直接測量原理則可降低振動和噪聲效應,從而消除對電機性能的影響。完善的扭矩控制能力則有利于提高電機效率,減少排放和散熱,并能延長電機壽命。除此以外,低相位延遲(2μs)則可實現(xiàn)快速閉環(huán)控制,提高工業(yè)伺服電機、機器人、電動轉向等高動態(tài)應用中的響應能力。
什么是AMR?
AMR是Anisotropic Magneto Resistance的縮寫,意為各向異性磁電阻。這是一種具有施加磁場后電阻減少功能的元件,其功能取決于磁力線相對于元件的方向(各向異性)。
AMR元件的材料采用強磁性金屬。
AMR元件的材料采用Ni、Fe等合金而成的強磁性金屬。
由于具有正側和負側對稱的特性,因此即使磁鐵的N和S反轉,也可執(zhí)行相同的動作。利用此特性,可以非接觸方式獲取高精度、可靠的數(shù)據(jù)。此外,利用可進行這種非接觸式檢測的特點,還可將其靈活運用于打開、關閉檢測和旋轉檢測、位置檢測等各種應用。
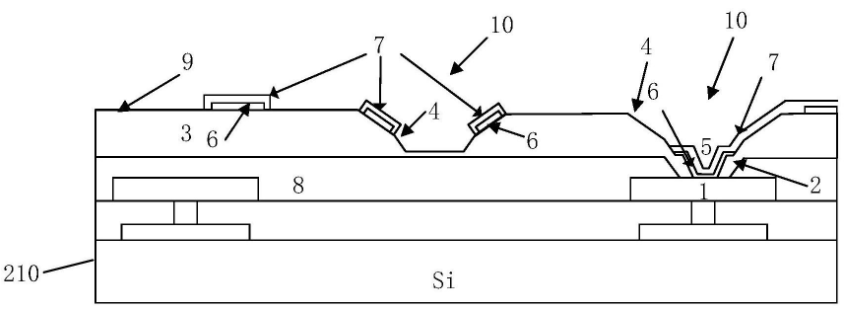
輸出類型:數(shù)字輸出
傳感器在與IC和AMR元件相同的基板上形成。通過IC對AMR元件的模擬信號進行數(shù)字處理,實現(xiàn)了Hi、Lo級別的數(shù)字輸出,因此客戶無需進行信號處理。
何為AMR(磁力)傳感器的靈敏度?
AMR傳感器的靈敏度是AMR傳感器打開(或關閉)時的磁力強度。在0(零)或弱磁場中處于關閉狀態(tài)的AMR傳感器打開時的磁力被稱為ON靈敏度(Hon),而在強磁場中處于打開狀態(tài)的AMR傳感器關閉時的磁力則被稱為OFF靈敏度(Hoff)。各AMR傳感器的靈敏度之間存在差異,數(shù)據(jù)表上的Hon、Hoff僅表示該產(chǎn)品所處范圍。
AMR傳感器的優(yōu)勢是什么?
靈敏度和尺寸種類豐富
AMR傳感器的靈敏度、響應能力和消耗電流的種類繁多,因此您可按用途選擇最適合您的產(chǎn)品。
適用于靈活的配置和設計
即使AMR(磁力)傳感器的磁鐵N極和S極反轉,傳感器的動作也不會改變。
與霍爾IC相比,這種小型、高精度AMR傳感器具有靈敏度范圍更廣的特性,因此磁鐵和傳感器的配置更加靈活,可以減少外殼和貼裝時的安裝誤差。
此外,由于AMR傳感器并非類似磁簧開關的結構部件,因此可確保其小型、可靠的特性。
磁力傳感器的適用優(yōu)勢
磁力線是肉眼所看不見的。磁力線不會被塑料等非磁性材料吸收,而是穿透到另一面。磁力傳感器就是利用這些特征進行檢測的。
例如,可輕松運用于以下場景便是其一大優(yōu)勢。
小型且無法看到開關所在位置:筆記本電腦的打開、關閉檢測和安全設備的動作設定
最適用于注重密封的構造物
?
氣體和水等的旋轉檢測
易于實現(xiàn)防水結構
?
可穿戴終端的電源開關
AMR傳感器的原理:磁阻元件
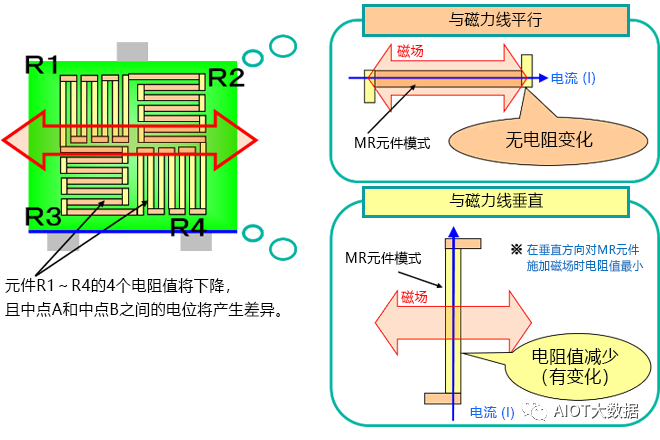
磁阻元件的電阻在與電流方向垂直的磁場中會發(fā)生變化。AMR傳感器通過如圖所示的模式配置后,即可組合電阻會發(fā)生變化的元件(R1、R4)與電阻無變化的元件(R2、R3)。
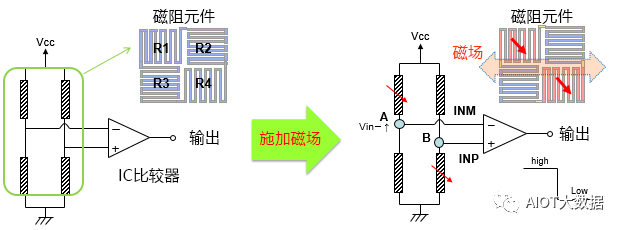
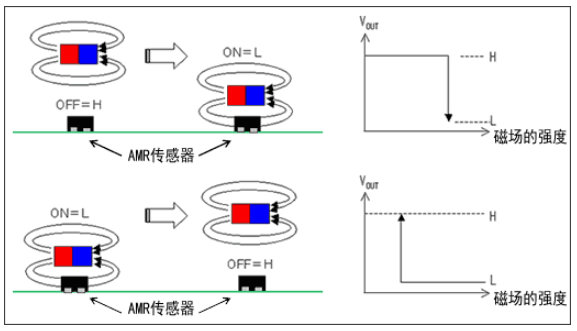
AMR傳感器的動作
施加磁場后,磁阻元件R1、R4的電阻值將下降,且中點A和中點B之間的電位將產(chǎn)生差異。
當電位差超過規(guī)定的設置值(閾值)時,將切換傳感器的ON/OFF輸出。
傳感器內直方圖
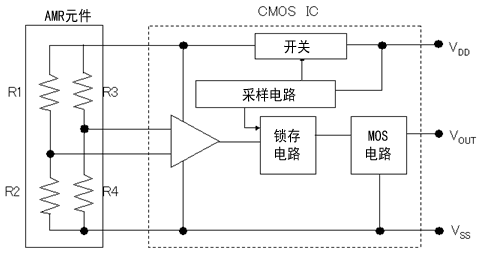
3端子結構
磁塊為單個IC封裝,用于將AMR元件及其輸出信號轉換為數(shù)字信號。
3端子結構包括輸入端子(VCC)、GND端子(GND)、輸出端子(OUT),采用了搭載抑制消耗電流的采樣電路結構。
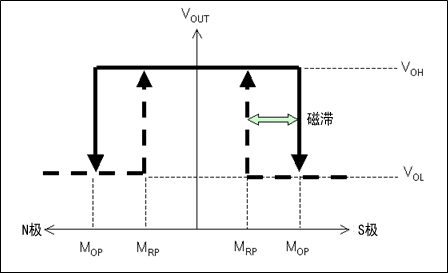
防震動
震動是指切換繼電器或開關觸點時,由于細微且極快的機械震動導致電力信號反復中斷的現(xiàn)象,是造成電子電路故障的原因之一。
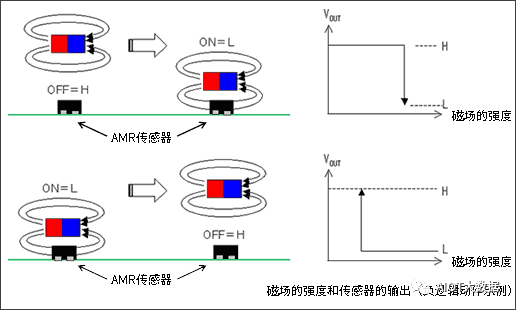
為防止震動的產(chǎn)生,已使工作磁場具有磁滯。
若磁鐵靠近傳感器且磁場超過MOP時,OUT即由H變?yōu)長。
若磁鐵遠離傳感器且磁場低于MRP時,OUT即由L變?yōu)镠。
與霍爾IC的區(qū)別
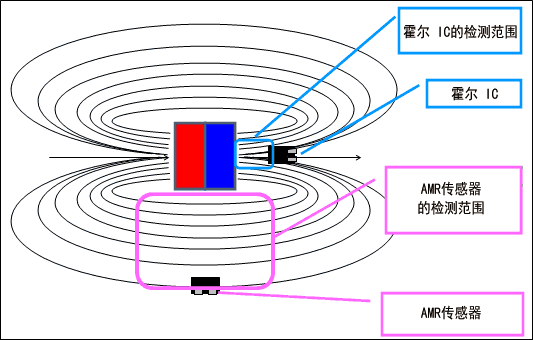
磁鐵采用小巧輕薄的設計
AMR傳感器可使用的磁場范圍更廣,因此檢測范圍也更廣。
因其檢測范圍較廣,所以可減少外殼公差和貼裝時的誤差。與霍爾IC相比,具備磁鐵可采用小巧輕薄的設計等優(yōu)勢。
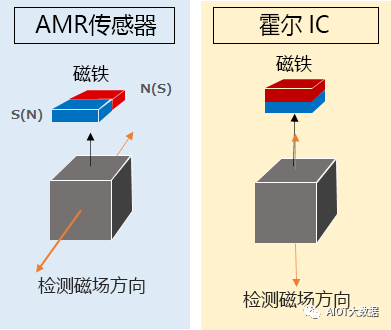
磁鐵方向的不同
磁鐵在傳感器正上方時,霍爾IC的磁鐵配置為垂直放置,而AMR則為水平放置。二者的磁場檢測方向有所不同。
由于磁鐵磁極附近的磁力較強,所以縱向放置磁鐵時,若附近有信用卡等磁力數(shù)據(jù),則有可能影響卡中的數(shù)據(jù),而對于智能手機和筆記本電腦等無法垂直放置磁鐵的電子設備,AMR則會顯示出優(yōu)勢。(水平放置并不意味著磁力數(shù)據(jù)不會消失。)
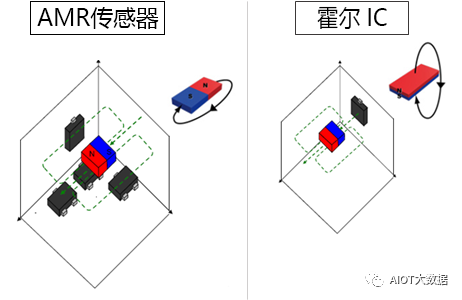
設計自由度
為檢測水平磁場,可以考慮多種AMR傳感器的放置方式,從而增加了設計自由度。
而霍爾IC通常定點檢測垂直方向的磁場,因此會建議您將磁鐵就近安裝在霍爾IC的正上方,這就會限制設計自由度。
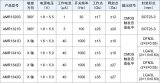
AMR傳感器與霍爾IC的對比表
檢測原理
傳感器材料
檢測方向
檢測范圍
| ? | AMR傳感器 | 霍爾IC |
|---|---|---|
| 磁阻效應 | 霍爾效果 | ? |
| NiFe合金 |
Si (低價格,低靈敏度) InSb (高靈敏度,溫度特性差) |
? |
| 水平磁場 | 垂直磁場 | ? |
| 寬 |
窄 ? |
? |
與磁簧開關的區(qū)別
靈敏度波動更小,小型且抗沖擊
與磁簧開關相比,AMR傳感器由于靈敏度波動較小,因此具有磁鐵和傳感器配置設計的自由度更高的優(yōu)勢。
此外,因磁力傳感器尺寸較小,且可縮小您所使用的電路板并進行表面貼裝,因此有助于降低貼貼成本。同時,由于磁力傳感器比磁簧開關更抗震、抗沖擊,因此具有易操作的優(yōu)勢,而其無觸點的特征還會增加使用壽命。
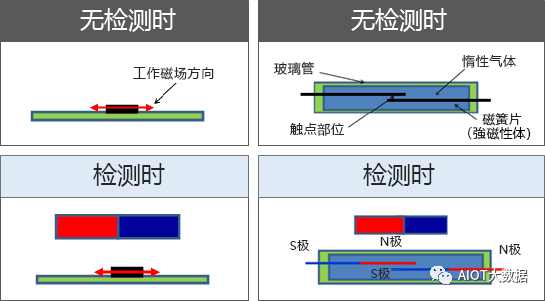
磁場檢測方向相同
由于磁場檢測方向相同,因此在磁簧開關中使用的磁鐵有可能直接適用于AMR傳感器。
然而需注意的是,由于AMR傳感器的開關本身存在電路,需有電源才能運作,所以布線數(shù)量會有所不同,或傳感器內部會產(chǎn)生消耗電流。
AMR傳感器與磁簧開關的對比表
尺寸
易貼裝性
靈敏度波動
抗震動、抗沖擊
設計自由度
產(chǎn)品壽命
指向性
線制
反彈時間
最大驅動頻率
| ? | AMR傳感器 | 與磁簧開 |
|---|---|---|
|
○ AMR傳感器最小封裝尺寸:1.45×1.45×0.55㎜ |
× | ? |
|
○ 無需進行引線端子彎曲、電路板研磨等特殊加工 |
× | ? |
|
○ 獨有的靈敏度調整功能可縮小靈敏度波動范圍 |
× | ? |
|
○ 磁簧開關不具備抗震動、抗沖擊的結構 |
× | ? |
|
○ 體積小巧、靈敏度波動小,因此設計自由度更高 |
△ | ? |
|
○ AMR傳感器不存在觸點壽命 |
× | ? |
|
狹窄 ※調整指向性 |
寬廣 | ? |
| 三線 | 雙線 | ? |
|
無 可實現(xiàn)高速處理 |
0.3ms | ? |
| 1~2kHz |
500Hz ? |
? |
審核編輯:劉清












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論