 電子發燒友App
電子發燒友App


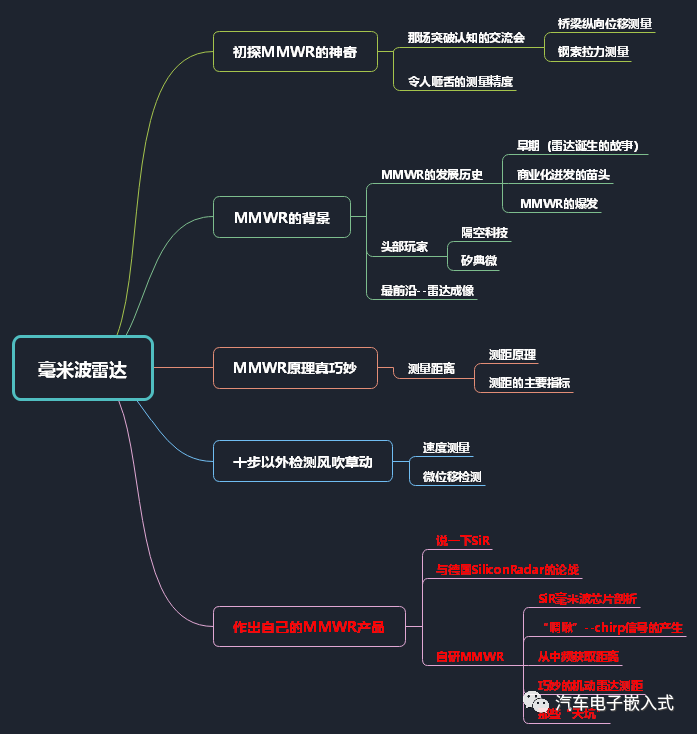
本系列文章為于振南老師的“工業之眼”--毫米波雷達(MMWR)部分,本文內容為:?作出自己的MMWR產品(研發記實)。
毫米波?也許你只在網上或新聞里有所耳聞,知道華為的5G基站使用了毫米波,或者知道特斯拉的自動駕駛有MMWR。其實前者是毫米波的通信應用,它使得通信帶寬得到質的飛躍,為所謂的“大上行業務”應用提供了支撐(實時機器視覺就是最典型的“大上行”應用)。不過,本章并不講毫米波的這種通信應用,而是側重于后者,即在雷達方面的應用。
2021年前后,我的硬件團隊一直在研發一個神奇的東西,就是太赫茲MMWR(THz MMWR)。應該說這項工作還是極具挑戰的。我團隊里有從英國名校留學回來的硬件工程師,精通高頻模擬電路設計和無線系統仿真;另有工程師,包括我在內精通數字信號處理和嵌入式;這期間甚至還有位高權重的大佬(不便透露實名)參與關鍵部分的研發。即使這樣,我們仍然感覺到了巨大的研發阻力。
太赫茲毫米雷達其實是MMWR的一個先進分支,或者說是新興概念,它象征著最激進的MMWR技術。太赫茲MMWR的諸多優異特性使其成為了相關行業的聚焦點。
什么?MMWR到底是什么?它到底有多神奇?振南不再啰嗦,直接來看本章的內容。
正文
5、作出自己的MMWR產品(研發記實)
自從聽了那次技術交流會之后,我們被MMWR的優異性能和巨大優勢深深吸引了。在考慮了一段時間之后,我們決定將MMWR納入到產品戰略規劃中去。隨后我們就挑選精銳開始投入到MMWR的深入研究和產品設計研發之中。
其實一開始我們都是門外漢,完全沒有接觸過MMWR,甚至連基本的雷達相關知識都沒有。振南在本章中所介紹的相關知識基本耗費了3個月的時間來學習和消化,很多資料都是晦澀難懂(所以大家應該珍惜這一章的內容,振南是盡最大努力把它通俗化,把消化好的知識直接喂給大家,好像有點惡心)。
我們先后調研了很多的芯片方案,比如TI、AD、Infineon等等,走了很多彎路。最后我們選用了德國SiliconRadar公司(簡稱SiR)的芯片,它只提供RFE芯片,即雷達模擬前端,而DSP、相關的電路(比如鎖相環、信號調理等)都需要自己來提供和設計。選擇它的主要原因是因為該公司強大的背景和先進的技術。
5.1 說一下SiR
很多人可能不知道SiR這個公司,其實它是一個超級牛的公司。
在全球范圍內,毫米波雷達芯片核心廠商主要包括Infineon、NXP、TI、SiR等。2021年,全球第一梯隊廠商主要有Infineon、NXP、TI和SiR,第一梯隊占有大約70%的市場份額。其中SiR是專門作MMWR的,它的技術積累極為雄厚(因為專所以精)。它總部位于德國法蘭克福,一直在為各種雷達市場領域開發標準化的芯片產品和針對客戶的解決方案。它參與歐洲的很多智能交通相關研發項目,它的產品基本上代表了MMWR這方面的最先進水平。
千字不如一圖,來看一下SiR的東西,如圖18.39。
看到上圖,是不是又明白了為什么頻率越高越好(其實也不能這么說,主要是看適用場景)。頻率越低,所需要的天線體積就越大,頻率越高,天線就可以作得比較小,甚至直接集成到芯片里(主要是高頻毫米波的波長更短),上圖右邊的芯片就是采用了AiP工藝(Ant in Package)把天線封裝到了芯片之中。
“122GHz那個塑料罩是什么?”那個是透鏡,也是一種波導,主要是用來收窄波束用的,這樣測量距離就可以更遠。(透鏡的形狀和材料都是有嚴格要求的,通常是拋物面,材料是PTFE,即聚四氟乙烯,這種材料對電磁波的衰減比較小)
5.2 與德國SiliconRadar的論戰
我們了解到很多作MMWR的公司都有專門的團隊來專門從事這方面的研發,而且有的團隊規模還不小。像前面給我們作交流會的ZGZL,他們有10人的研發團隊,而且40%是雷達專業的博士;SiliconRadar的研發團隊實力就更加雄厚了,它們包括雷達系統、硬件設計、射頻設計、測試等人數超過40人,其中有15-20是行業專家。再回過頭來看看我們,我們只有3個人,還有一個是上位機軟件工程師,其它兩個是嵌入式和電路設計,而且起初完全沒有MMWR的基礎。但是產品一定是要作的,怎么辦?這就是我這個研發總監要考慮的事情了。以下是我起初為MMWR研發而考慮的一些解決方案。
1、招毫米波相關的人才。針對于這個問題我向高層申請解釋了很多次但是都沒有得到批準。老板的話是:毫米波這個東西沒那么難,硬件部現有的這些人難道搞不了嗎?這就是典型的讓驢拉磨又不給驢吃飽。一氣之下:“不招了,我們自己搞!”
2、尋找技術支持來指導研發。本來我考慮可以通過渠道找到一些雷達方面的專家來進行請教,或者在研發關鍵點上給于指導,甚至是代調。公司背后是有高校資源的,但是我發現這些高校的老師完全是學院派,在實際工程方面并給不了什么有價值的建議。還得欠人情,說好話,流于虛套。
3、尋求SiR官方的技術支持。考慮SiR為了推廣芯片,會向用戶提供必要的技術支持。但是后來我發現,SiR根本不關心我們這樣的小規模應用。它有限的技術支持還是留給頭部大客戶的。說白了,它根本不鳥你。他們推薦了一種可行的方案,即委托開發。
“你具體要作一個什么樣的產品?”
“毫米波物位計。(其實就是測距儀)”
“具體指標需求?”
“50米測量范圍,0.01mm的測量精度。”
“你這個需求還是比較高的,委托開發的話,我給你擬一個報價。”
后來SiR發來了委托開發報價,這也不是什么機密,報價單如圖18.40。
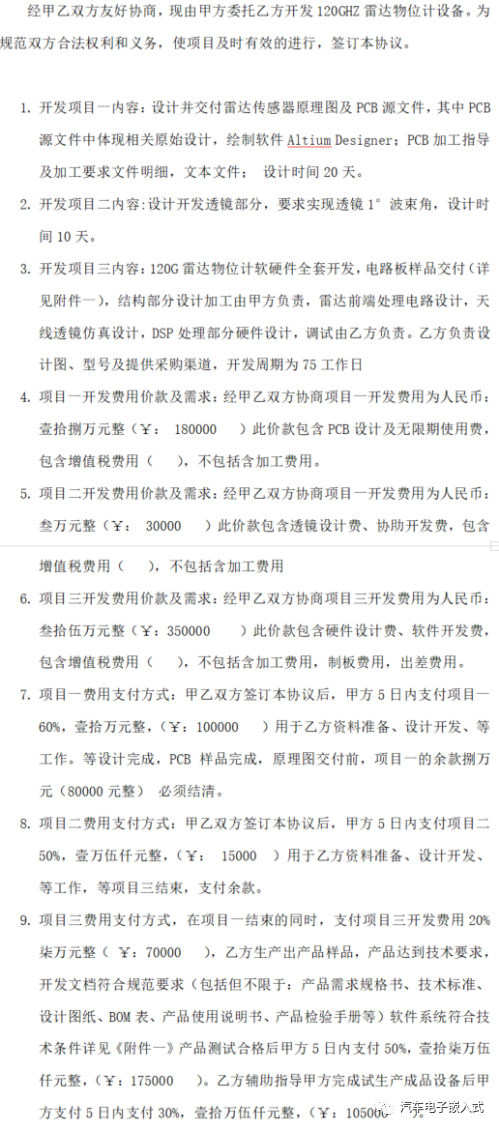
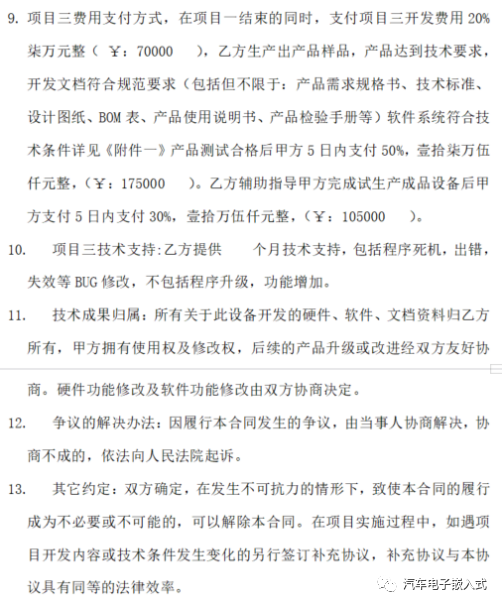
圖18.40?毫米波物位計委托開發協議書
委托開發的價格已經近百萬了,這肯定有敲竹杠的意思。下面就是論戰的開始。
“你這價格也太高了,超出我們的預算!”
“這個研發投入還是很大的,不是那么簡單的東西!”
“你們作的話,多長時間能看到東西?”
SiR的人小聲討論了一下,應該是在問研發的負責人。“半年,我們作的話最快也得半年!”
其實我們已經打消了委托開發的念頭,這個價格就算砍掉一半老板也是不可能同意的。而且,說實話,這個委托開發可能還是個坑,如果花了錢最終還沒有作好,或者被他們牽制后期小錢不斷,我們就掉進無底洞了。到時候,老板可不會對你那么客氣。
“別猶豫了,你們自己作不出來的!你們就沒有作雷達這塊的人,自己研究的話,沒有意義!”這頗有點蘇聯專家撤退銷毀原子彈資料的意思。
我還不敢把關系搞得太僵“這樣,我們先作著看,如果有不能攻克的問題,我們再向您有償請教。”
然后,就沒有然后了。
5.3 自研MMWR(主力硬件研發工程師親自講述,曾留學英國)
后來,我們對毫米波物位計項目進行了內部立項,確定走完全自研的路線。我所帶領的硬件團隊也抽調了近半數人員參與了這個項目。包括電路設計、天線仿真、結構設計、嵌入式、上位機開發以及硬件測試。甚至把一些其它項目停掉來為這個項目讓路。
以下是一些工程技術干貨,有些是我們具體的一些研發成果。
5.3.1??SiR毫米波芯片剖析
自研120GHz毫米波射頻前端這個工作估計可以培養好幾位博士了,我們顯然沒有這樣的實力和時間,經過了前期大量的調研工作,最后決定直接使用SiR的射頻前端芯片,好處是可以直接跳過射頻部分,把更多的精力放在應用上。
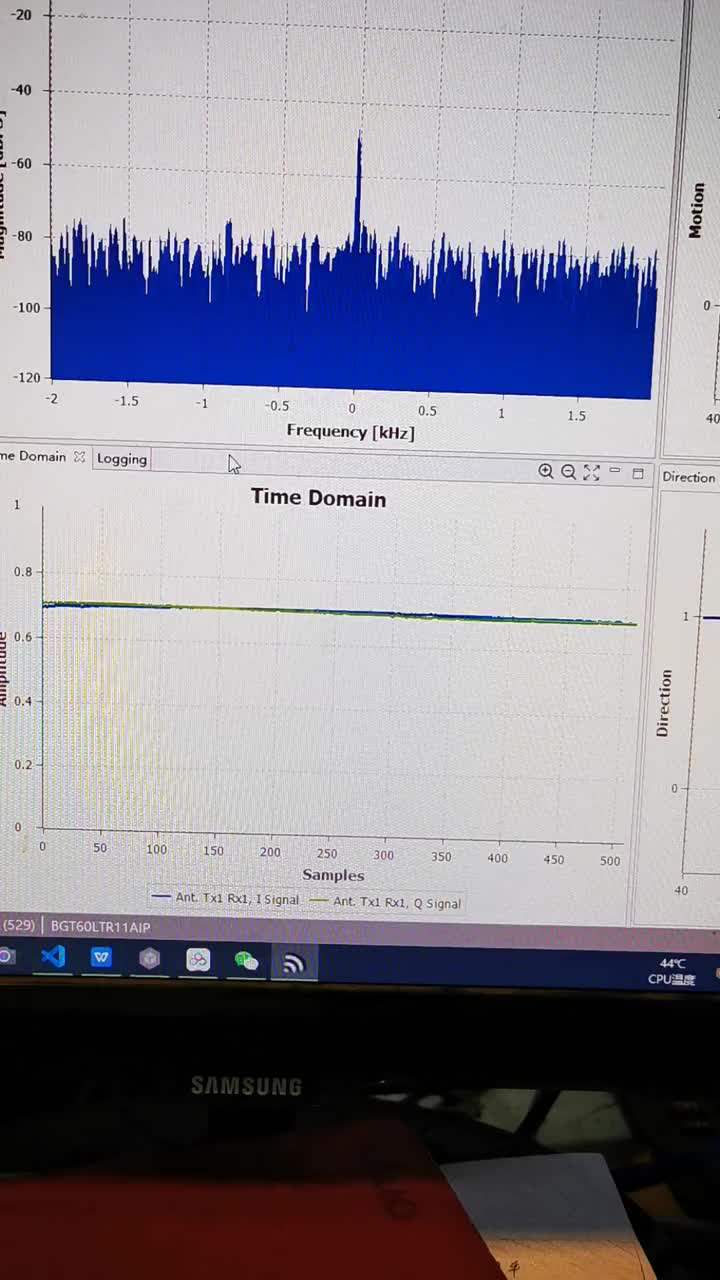
SiR芯片內置片上天線,可以自己產生119GHz至125GHz的毫米波信號,以完成發射、接收和混頻的功能。此芯片直接輸出中頻信號,濾波后的中頻信號的頻率等于發射以及接收信號的頻率差。下面我們拆開芯片,看一看它的內部究竟有什么樣的結構。
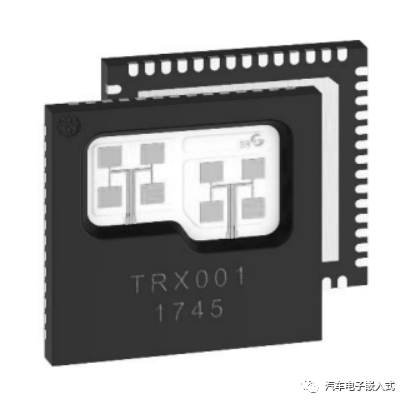
圖18.41 SiR毫米波芯片外觀
我們當時使用的SiR芯片從外部可以直接看到天線,這款芯片的焊接可是難壞了我們的工程師。因為天線附著的白色基底無法承受高溫,天線會直接翹起來。后來在損失了幾個芯片之后才摸索出了快速有效的焊接方法。
圖18.41中的天線一個用來發送毫米波,另一個用來接收。后來SiR又出了一款天線內置在硅片上的版本,無法直接觀察到天線,應該會容易焊接一些。這兩個芯片的輻射方向圖有一些差異,天線可見的芯片發射角度要更小一些。
SiR芯片的內部主要是壓控振蕩器(VCO: Voltage-Controlled Oscillator),功率放大器(PA: Power Amplifier),混頻器,低噪聲放大器(LNA: Low Noise Amplifier)等。
VCO根據輸入電壓可以產生兩路成倍數關系的振蕩信號,比如,一路60GHz和一路120GHz。120GHz的信號經過緩沖器、放大器和天線被發射到了空間中;反射回來的信號則被天線接收,通過LNA放大之后,與此時正在發射的信號進行混頻;另一路60GHz信號,經過32分頻后輸出至外部,用于形成頻率控制環。頻率控制環需要外部的分頻和鑒頻電路參與,共同形成PLL回路。如圖18.42所示。
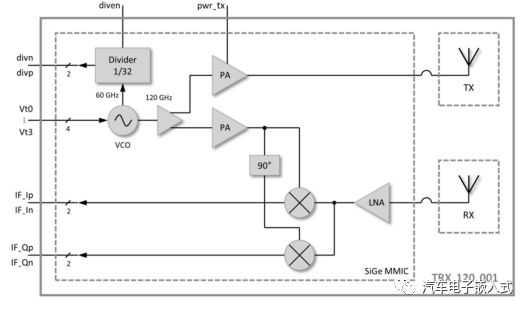
圖18.42?SiR毫米波芯片內部結構
SiR毫米波芯片的輸出信號,則是一對IQ信號。距離測量的場景下,只需要解析其中一路的頻率和相位即可。一般輸出的信號需要經過阻抗變換,濾波和放大之后才能被ADC采集。
至此,可以繪制出毫米波物位計大概的整體結構了。如圖18.43所示。需要說明的是我們研發的毫米波物位計一般用來測量移動速度較慢的物體,否則多普勒效應就需要增加額外的信號處理了。
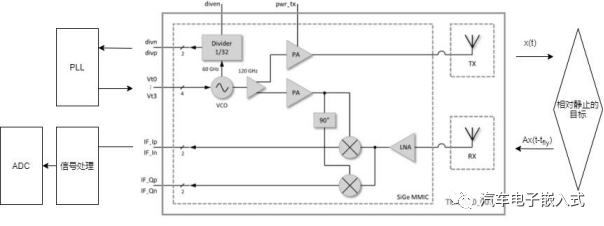
圖18.43?毫米波物位計總體結構
5.3.2 ?“啁啾”--chirp信號的產生
射頻信號的收發,少不了類似于分頻器、PLL、鑒頻鑒相器等部件對信號進行調制。一方面要維持頻率的穩定性,否則信號就會“跑調”;另外還需要對載波的頻率或者相位進行調制,這樣才能傳遞信息。
那么PLL是如何實現頻率的穩定呢?請看圖18.44,一個典型的PLL環路由VCO,分頻器,鑒頻鑒相器以及參考頻率信號構成。參考頻率信號一般是穩定性較高的固定頻率時鐘源,比如晶體振蕩器。鑒頻鑒相器類似于一種差分放大器,當其輸入的兩個頻率有差異時,它會輸出一個和差異信號成比例的電壓。VCO則是執行器,負責把電壓轉換為目標頻率。然而有時目標頻率會非常高,或者不容易找到匹配的晶振作為參考頻率信號,這時候就需要分頻器把VCO的輸出進行降頻。
這個環路可以很好地解決VCO的各種漂移問題,并且能使用一個比較容易實現的低頻電路,搭配一個高頻的VCO實現穩定的高頻信號。
那么如何對信號進行調制呢?參考頻率信號肯定是不能動的,鑒頻鑒相器的“增益”也不容易隨意改變,那么只能改變分頻器的分頻倍數,也只有分頻器可以做成純數字電路。
問題就出在分頻器這里。一般分頻就是直接2分頻,4分頻,8分頻等等,分頻系數為2的指數倍。如果只產生一個固定的頻率輸出,可能整數分頻還好使,但是如果想要產生一個連續調頻波,難度就會很大。因為一般調制帶寬相對于載波頻率會小得多。如果一會使用2分頻,發射了2GHz的信號,一會又改成了4分頻發射1GHz的信號,那豈不是浪費了大量帶寬?
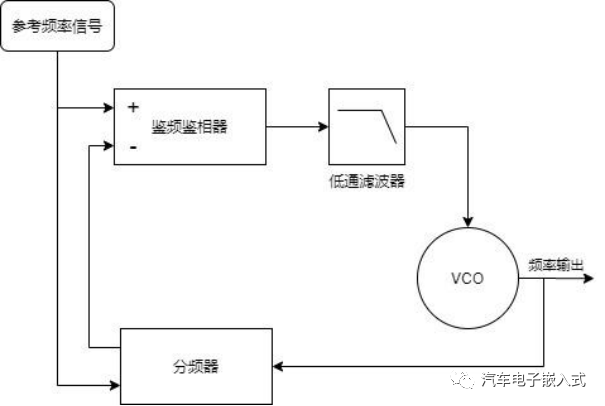
圖18.44?一個典型的PLL環路
那么如何產生2GHz和2.1GHz呢?
相信很多人應該聽說過微積分,也一定聽老師說過數學不僅僅是如何計算而是學會數學的思想。使用數學的思想去解決問題。那么分頻器里面也是利用了微積分的思想。
分頻器內部有一個控制器,會以參考頻率信號作為工作時鐘,根據用戶對寄存器的設置,控制整數分頻的分頻數,比如可以控制第一秒進行N分頻,第二秒進行N+1分頻。靈活控制兩個不同分頻數的占比,可以在使鑒頻鑒相器輸出類似于PWM波的信號,經過低通濾波器處理形成電壓信號,最終控制VCO。
有些鎖相環芯片具有內部控制器,可以根據用戶的設置自動控制分頻器的分頻比,實現控制VCO輸出調制信號的目的。小數N分頻里的控制器是核心部件之一,直接關系到VCO輸出頻率的穩定性和噪聲水平。
我們團隊使用了ADF4159構成鎖相環。該芯片內部集成了斜坡發生器,可以控制VCO產生連續調頻波,連續調頻波的頻域圖形就是鋸齒形,或者三角波。ADF4159還附帶有一系列的控制信號,來觸發chirp信號和指示信號的結束。利用這些控制信號,可以和ADC聯動進行采樣等操作。關于這個芯片的具體信息,可以去參考芯片的手冊,有時候仔細研究手冊也可以學到很多的知識。
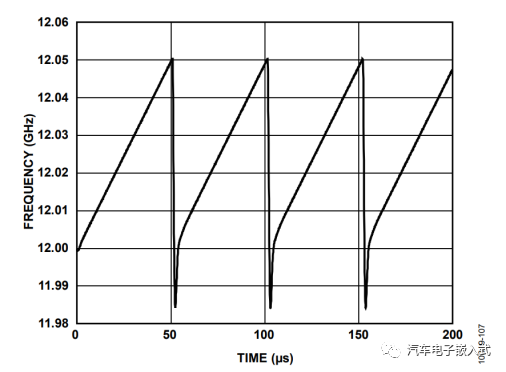
圖18.45?一個典型的鋸齒斜坡
圖18.45為ADF4159手冊里的一個典型鋸齒斜坡,橫坐標是時間,縱坐標為頻率。鋸齒斜坡代表一個個持續時間為50us的連續調頻波,調頻波的頻率從12GHz至12.05GHz。這個鋸齒斜坡可以由ADF4159自動循環產生。通過設置每一個循環的步長以及每一步之間的時間間隔,可以實現改變斜坡的時長(即斜率)。
學習了ADF4159之后,便可以靈活地控制chirp信號的帶寬和長度了。那么到底該多長呢?我們在做設計的時候使用了SiR芯片的全部帶寬,以獲取足夠多的采樣點數。但是斜坡的斜率到底應該是多少呢?
通過前面的章節可以知道,如果目標距離越遠,回波和發射波之間的頻率差就越大,那么如果ADC的采樣頻率有限,就無法正常測量遠距離的物體。這個時候就需要改變斜坡的斜率,控制發射波的頻率增速。反之,如果目標距離太近,頻率差太小的時候可能信噪比會不夠理想,無法正常解析有用信號。
5.3.3 ?從中頻獲取距離
SiR芯片輸出的中頻信號,需要經過阻抗變換、濾波和放大才能被ADC采集。也可以把阻抗變換和低通濾波器集成在一起。
中頻信號的帶寬可以達到幾百兆赫茲,而對于我們當時的項目來說實際可以使用的只有前面的幾兆赫茲,這時候就需要低通濾波器把高頻信號濾掉。同時,低通濾波器的截止頻率還應該兼顧ADC的采樣頻率或者ADC的架構。Σ-△架構的ADC自帶過采樣屬性,有一定的抗混疊能力。不過還是建議把濾波器截止頻率設計為符合奈奎斯特采樣定理。工程上,采樣頻率一般為截止頻率的3至4倍。
一般低通濾波器設計為單位增益,不過為了提高集成度減輕后級放大壓力,也可以根據選用的運放適當設計幾倍的增益。關于先放大還是先濾波,會有一些爭議,在本項目的應用中,中頻信號并不是一個非常小的信號,另外中頻信號中可用的頻帶確實比較窄,所以最后選擇了使用兩倍增益的低通濾波器。
低通濾波器有很多種可以選擇,但是需要知道中頻信號的哪個參數對我們是最重要的。幅值信號只需要在ADC的動態范圍內即可。最終的還是頻率和相位信號。濾波器對不同頻率的信號具有不同的移相特性,需要明確所設計濾波器的相移特性或者直接設計在通帶內相移特性平坦的濾波器。
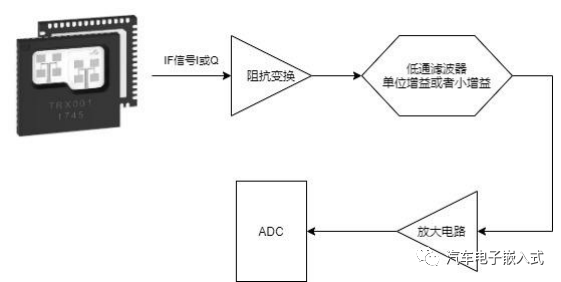
圖18.46?一個典型的信號調理電路
選擇ADC的時候需要綜合考慮很多因素。首先是具體的研發指標,相同的信號,采樣頻率越高,在做FFT時頻率分辨率就越高,同時造價也就越貴。高速率的采樣不僅會導致ADC價格增高,數據處理和傳輸的復雜度都會增高。
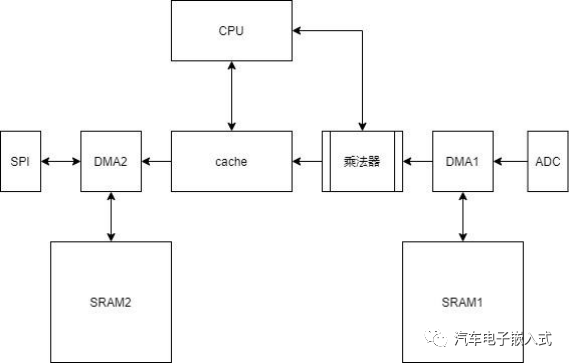
圖18.47?處理器內部各模塊結構
我們團隊選用FFT作為核心算法,來獲得中頻信號的頻率和相位信息。ARM官方有FFT庫可以直接調用,如果選用的處理器帶有浮點乘法加速器(FPU),可以很快速地完成FFT的計算。我們當時使用的庫最多只支持到4096點,后期做算法需要插值運算,最多要處理8192點,后來又基于原庫的算法,進行了升級。有些處理器帶有cache和SRAM組成的多級緩存,FFT的數據可以分級存放,把需要頻繁存取的數據放入cache中。而有些處理器cache比較少,需要一定的策略去完成數據的調用。
我們當時充分使用了DMA控制器實現并行處理。首先使用DMA將ADC的原始數據搬入SRAM,同時內核在進行FFT運算。一次采樣結束之后,FFT也基本上已經完成了處理,然后對ADC數據進行轉換防止做FFT時溢出,轉換的結果直接存入cache,然后開始后續的FFT運算,同時開始采樣。
整個負責數據處理的部分沒有使用操作系統,而是充分發揮處理器的DMA和硬件總線的性能。另外硬件上還設計了一個處理器專門用于處理數據發送,云端指令等業務邏輯。它們之間通過共享RAM的方式實現數據和指令交互。
5.3.4?巧妙的機動雷達測距
上文中提到使用FFT對中頻信號的頻率和相位進行解算,獲得中頻信號的頻率之后就可以知道頻率差,以此推算時間差,獲得飛行時間之后就可以知道距離。
但是FFT,或者說我們的這套處理系統有一個致命缺陷。FFT是離散傅里葉變換,但是我們的宏觀世界,距離變化是連續的。所以這一套系統必然會因為FFT的頻率分辨率而存在一個距離分辨率。
同時,如果距離變化在一個波長以內,中頻信號只會表現為相位的變化。
為了解決這個問題,有很多思路。我們當時提出了一個非常大膽而又有效的思路,使用內置機械結構(電機)在一個確定范圍內移動測距儀,使FFT的頻點跳動一格,同時解算和記錄相位。當頻點發生跳動時,意味著我們跨越了一格;只需要記錄起始的機械位移就可以把頻點及相位與真實的距離對應上。類似于進行一次對焦,焦點處的圖像最清晰,而且可以根據鏡頭的參數獲得焦點的準確距離,之后可以推算出被測物理距離焦點的位置,實現精確測距。
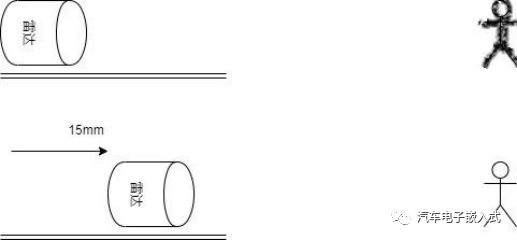
圖18.48?使用機械“對焦”的毫米波雷達
如圖18.48,雷達在導軌的初始位置,只能“看到”一個模糊的粗影。這時這個粗影可能在FFT刻度的左邊,也可能在右邊(未聚焦)。這時候雷達在電動的作用下往右側開始移動,假設移動了15mm,粗影突然在FFT的某一個刻度上出現,這個時候我們終于看清楚了,模糊的粗影變成了一個清晰的人影。因為雷達對于外殼測距基準點的位置是已知的,這時候人影的位置也可以直接計算出來。值得一提的是,傳統透鏡的焦點也許只有一個,而毫米波雷達“焦點”實際上是FFT頻譜上的每一個刻度。所以,雷達只需要向一個方向運動即可。(這種方法,我們稱之為機動毫米波雷達)
另外還有一些人在研究FFT的頻率估計算法,以求獲得高于FFT頻率分辨率的測量精度。但是這些算法大部分計算比較復雜,難以實現快速計算。另外受制于項目周期,還有一些優秀的算法我們沒有來得及進行測試。
另外通過完整利用IQ信號是否可以獲得更多的信息,我們也沒有再去深入研究。
5.3.5?那些“天坑”
搞射頻離不開天線。官方給的DEMO使用了一個透鏡天線。我們后來為了設計輻射窗口,分別測試了高密度聚乙烯(HDPE)、聚四氟乙烯(PTFE)、尼龍、聚醚醚酮和玻璃纖維等很多材料的透射率。這些材料的可見光透射率比較低,但是對于120GHz的毫米波來說,有些材料透射率非常高,比如聚四氟乙烯板基本上不會產生明顯損耗,而且它的密封性能和加工性能都很優秀。
透鏡天線則是一種類似于凸透鏡的天線,毫米波在材料中會發生折射,根據折射率不同可以制成不同的透鏡天線。透鏡天線具有很好的方向性,對于其它方向入射的雜波也具有很好的抑制作用,而且制造精度要求不高,易于批量。
但是我們當時苦于沒有找到很好的透鏡天線設計人員,轉而設計了拋物面天線(如卡薩格倫天線,如圖18.49所示)。后來為了提高電路的集成度,改成了偏心拋物面天線,如圖18.30。整體使用鋁合金制作,反射面上打磨光滑,電路板安裝在偏心位置。調試的時候在目標位置放一個明亮的光源,可以很明顯地看到光線經過反射之后匯聚到了毫米波芯片的內置天線位置上。
?
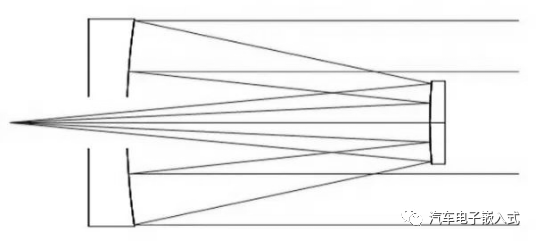
圖18.48?毫米波雷達拋物面+雙曲面天線(卡薩格倫天線)與原理
中頻信號處理也是一個大坑。尤其對于這個應用來說,中頻信號并不是連續的,而且還會受到各種環境干擾。搞毫米波一定要在專業的環境中,否則各種空間噪聲還有看不見的電磁波會讓人覺得在一個充滿量子幽靈的玄學世界。另外,調模電一定要有專業的儀器和專業的模擬電路工程師,如果連運放最基本的參數都看不懂,那還是先把基礎知識學好吧。否則,肯定會覺得這個世界上沒有幾家靠譜的芯片公司,會覺得ADI的芯片都有問題。此時ADI的FAE肯定想說:“是你的腦子有問題。”
總而言之,可以很大膽地去規劃一個產品,但是在研發過程中一定要對技術保持敬畏。
謝謝我的海歸寶貝工程師(馬崇琦)的親自講解。可能有些內容說得有點專業。正所謂高處不勝寒,水平越高,說話越接近天書。
“馬工,介紹給你一個電影《天書奇譚》,看一下!”
“南哥,別開玩笑了。這個講通俗不容易的。”
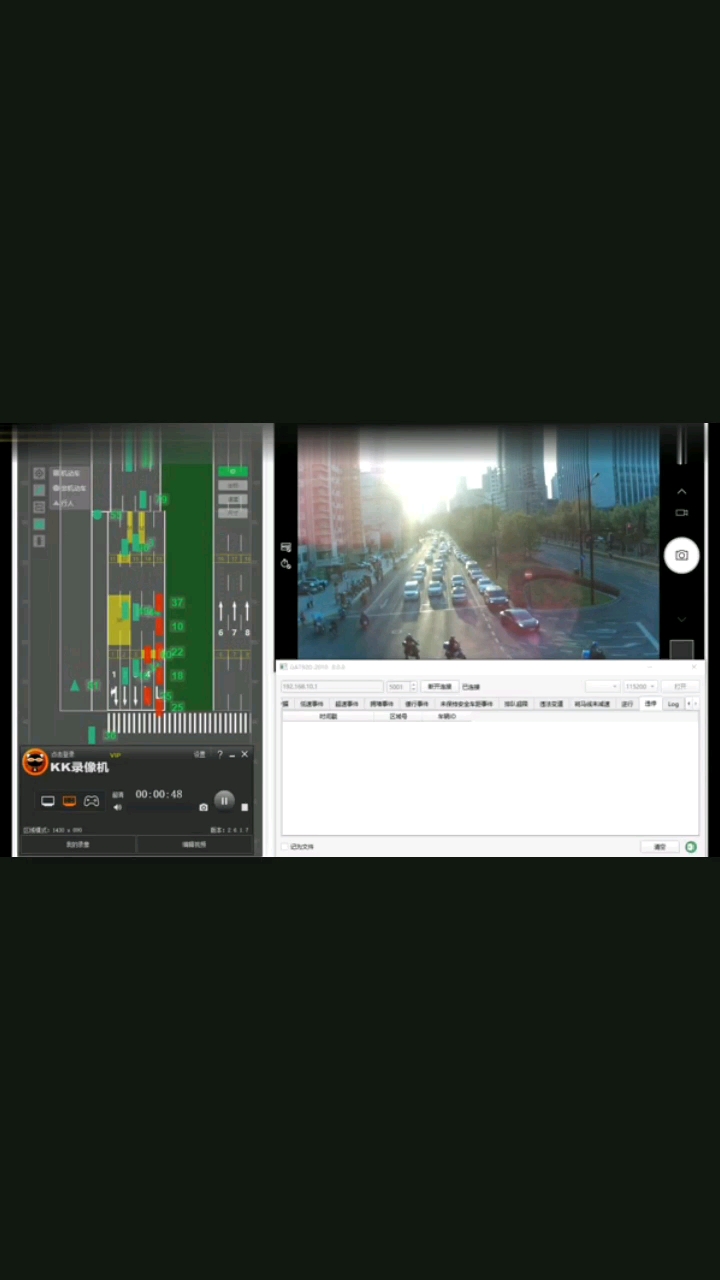
說了這么多,來看看我們最終的產品吧,如圖18.49-50所示。
通過本文的描寫,毫米波雷達是否刷新了你的認知?希望您能有所收獲。OK,這一章就寫到這里。
編輯:黃飛
?
















 工商網監
工商網監
評論