 電子發(fā)燒友App
電子發(fā)燒友App


本期給大家?guī)砥?a href="http://www.nxhydt.com/v/tag/117/" target="_blank">傳感器芯片(激光雷達增量篇),主要包括:括激光雷達、毫米波雷達、超聲波雷達等。 ?
1. 激光雷達概覽
(1)發(fā)展歷程
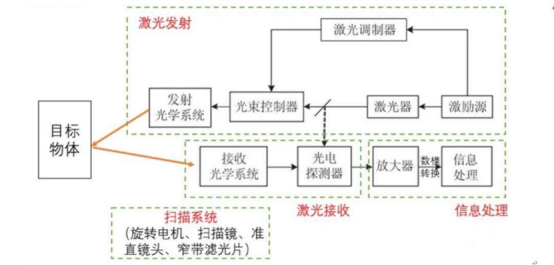
激光雷達LiDAR(Light Detection And Ranging)是激光探測及測距系統(tǒng)的簡稱,主要構(gòu)成要素包括發(fā)射系統(tǒng)、接收系統(tǒng)和信號處理系統(tǒng)。激光雷達系統(tǒng)的核心組件主要有激光發(fā)射器、掃描器及光學(xué)組件、光電探測器及接收IC,以及位置和導(dǎo)航器件等,可提供高分辨率的幾何圖像、距離圖像、速度圖像。 ? 激光雷達測量周圍環(huán)境生成點云
激光雷達的物理原理本質(zhì)上就是“距離=速度*時間”,通過測量激光信號的信號差和相位差來確定距離。相較于發(fā)射電磁波的毫米波雷達和發(fā)射機械波的超聲波雷達,激光雷達主動發(fā)射波長約為900-1,500nm的激光射線,利用多普勒成像技術(shù),創(chuàng)建出目標清晰的3D圖像,是其它傳感器無法比擬的感知能力。
激光雷達通過發(fā)射和接收激光束,分析激光遇到目標對象后的折返時間,計算出到目標對象的相對距離,并利用此過程中收集到的目標對象表面大量密集的點的三維坐標、反射率和紋理等信息,快速得到出被測目標的三維模型以及線、面、體等各種相關(guān)數(shù)據(jù),建立三維點云圖,繪制出環(huán)境地圖,以達到環(huán)境感知的目的。由于光速非常快,飛行時間可能非常短,因此要求測量設(shè)備具備非常高的精度。從效果上來講,激光雷達線數(shù)越多,測量精度越高,安全性就越高。
激光雷達工作原理
相比于可見光、紅外線等傳統(tǒng)被動成像技術(shù),激光雷達技術(shù)具有如下顯著特點:一方面,它顛覆傳統(tǒng)的二維投影成像模式,可采集目標表面深度信息,得到目標相對完整的空間信息,經(jīng)數(shù)據(jù)處理重構(gòu)目標三維表面,獲得更能反映目標幾何外形的三維圖形,同時還能獲取目標表面反射特性、運動速度等豐富的特征信息,為目標探測、識別、跟蹤等數(shù)據(jù)處理提供充分的信息支持、降低算法難度;另一方面,主動激光技術(shù)的應(yīng)用,使得其具有測量分辨率高,抗干擾能力強、抗隱身能力強、穿透能力強和全天候工作的特點。
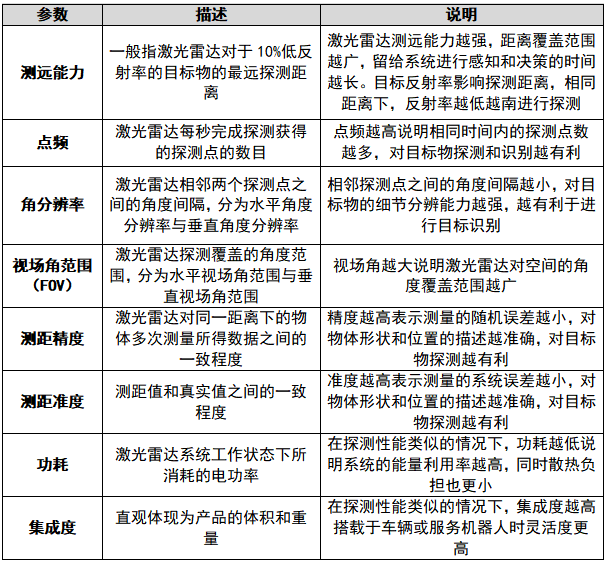
車載激光雷達性能評價包括顯性參數(shù)與隱性指標。顯性參數(shù)指列示在產(chǎn)品參數(shù)表中的信息,主要包含測遠能力、點頻、角分辨率、視場角范圍、測距精準度、功耗、集成度(體積及重量)等。隱性指標包含激光雷達產(chǎn)品的可靠性、安全性、使用壽命、成本控制、可量產(chǎn)性等,這些指標更加難以量化,也缺乏公開信息,只能通過產(chǎn)品是否應(yīng)用于行業(yè)領(lǐng)先企業(yè)的測試車隊或量產(chǎn)項目中得以體現(xiàn)。
激光雷達主要性能參數(shù)
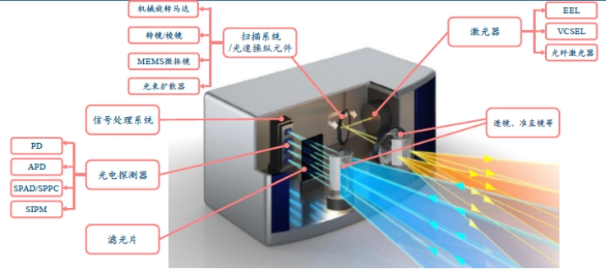
資料來源:禾賽科技 ? 激光雷達核心構(gòu)成包括激光發(fā)射系統(tǒng)、掃描系統(tǒng)(光束操縱元件)、傳輸與接收光學(xué)系統(tǒng)、光電探測器及信號處理系統(tǒng)。其中掃描系統(tǒng)、激光發(fā)射器和光電探測器均存在不同技術(shù)路線,進而導(dǎo)致激光雷達整機技術(shù)路線繁多。目前,激光雷達四大系統(tǒng)包括激光器、光束控制器、FPGA芯片在內(nèi)的核心元件基本被國外大廠壟斷。
激光雷達內(nèi)部結(jié)構(gòu)圖
資料來源:濱松電子
激光雷達分類方式多樣,根據(jù)測距原理、掃描方式、激光發(fā)射、激光接收等環(huán)節(jié)所采取的方案不同,均可對激光雷達進行分類。其中又以測距原理和掃描方式的分類最為常見。按掃描方式正成為車載激光雷達廠商分類定位的主要依據(jù)。究其原因,在于掃描技術(shù)直接決定了激光雷達的掃描頻率、掃描范圍、采集數(shù)據(jù)量等關(guān)鍵技術(shù)參數(shù),與最終探測成像質(zhì)量息息相關(guān)。此外,掃描技術(shù)的演變還是產(chǎn)品邁向小型化、高性能、低成本的重要一環(huán),是車載激光雷達能否實現(xiàn)商業(yè)化量產(chǎn)的關(guān)鍵因素之一。根據(jù)內(nèi)部有無運動器件,激光雷達可分為機械旋轉(zhuǎn)式、混合固態(tài)式以及純固態(tài)式三大類別。
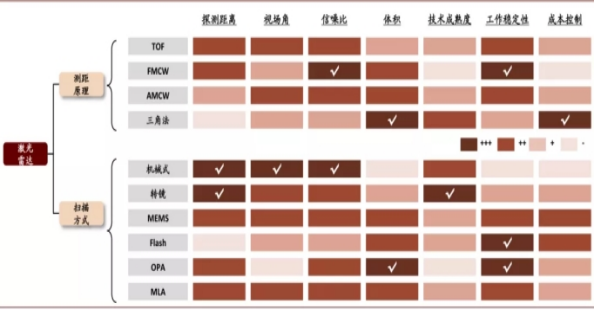
當前業(yè)界并無終極解決方案。基于探測距離、視場角、信噪比、體積、穩(wěn)定性、成本控制、技術(shù)成熟度等多維度,對于不同測距原理、掃描方式下方案的整理如下表所示,可見不同方案均有各自優(yōu)劣,主機廠在當前階段需在不同考量維度中進行取舍。 ? 激光雷達主流分類方式及優(yōu)劣性
資料來源:IDTechEx

2.產(chǎn)業(yè)鏈
 ? ? 激光雷達產(chǎn)業(yè)鏈上游為激光器、光源、光學(xué)部件、振鏡、模擬芯片、FPGA芯片等;產(chǎn)業(yè)鏈中游為激光雷達硬件廠商;下游產(chǎn)業(yè)鏈按照應(yīng)用領(lǐng)域主要分為自動駕駛、高級輔助駕駛、服務(wù)機器人和車聯(lián)網(wǎng)行業(yè)。 ?
? ? 激光雷達產(chǎn)業(yè)鏈上游為激光器、光源、光學(xué)部件、振鏡、模擬芯片、FPGA芯片等;產(chǎn)業(yè)鏈中游為激光雷達硬件廠商;下游產(chǎn)業(yè)鏈按照應(yīng)用領(lǐng)域主要分為自動駕駛、高級輔助駕駛、服務(wù)機器人和車聯(lián)網(wǎng)行業(yè)。 ?
整體而言,激光雷達全產(chǎn)業(yè)鏈表現(xiàn)出發(fā)展速度快、科技水平高、創(chuàng)新能力強、市場前景廣闊的突出特點。從國外產(chǎn)業(yè)鏈與國內(nèi)產(chǎn)業(yè)鏈比較的角度而言,國外激光雷達上游企業(yè)由于起步更早,積累更為深厚,尤其在底層光電器件以及芯片領(lǐng)域擁有一定先發(fā)優(yōu)勢。國外和本土激光雷達下游企業(yè)在產(chǎn)品性能和商業(yè)化進度方面不相上下,國內(nèi)上游供應(yīng)商也在近幾年發(fā)展迅速,有望實現(xiàn)與海外上游企業(yè)逐步持平。
激光雷達產(chǎn)業(yè)鏈全景圖

資料來源:千方科技
(1)上游供應(yīng)商
激光雷達行業(yè)的上游產(chǎn)業(yè)鏈主要包括激光發(fā)射器、光電探測器、FPGA芯片、模擬芯片供應(yīng)商,以及光學(xué)部件生產(chǎn)和加工商。 ? 激光雷達上游供應(yīng)商

資料來源:Yole ? 頭部激光雷達廠商上游資源
資料來源:大半導(dǎo)體產(chǎn)業(yè)網(wǎng)
①激光發(fā)射器
激光發(fā)射器和光電探測器是激光雷達的重要部件,激光發(fā)射器和探測器的性能、成本、可靠性與激光雷達產(chǎn)品的性能、成本、可靠性密切相關(guān)。而且激光雷達的系統(tǒng)設(shè)計會對激光發(fā)射器和探測器的規(guī)格提出客制化的需求,與上游供應(yīng)商深入合作定制激光發(fā)射器和探測器,有助于提升產(chǎn)品的競爭力。
按照增益介質(zhì)的不同,激光器可以分為氣體激光器、固態(tài)激光器、光纖激光器、半導(dǎo)體激光器(激光二極管)和液體激光器五大類。EEL與VCSEL均屬于半導(dǎo)體激光器,光纖激光器主要用半導(dǎo)體激光器做泵浦源,這三種是目前比較主流的激光器產(chǎn)品。
VCSEL與EEL加工過程對比
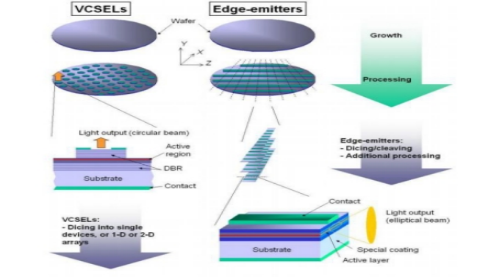
資料來源:Princeton Optronics
EEL具有功率密度高的性能優(yōu)勢,但其發(fā)光面位于半導(dǎo)體晶圓的側(cè)面,使用過程中需要進行切割、翻轉(zhuǎn)、鍍膜、再切割的工藝步驟,極其依賴產(chǎn)線工人的手工裝調(diào)技術(shù),生產(chǎn)成本高且一致性難以保障。此外EEL只有切割晶圓后才能完全產(chǎn)生激光,在生產(chǎn)過程中無法進行測試。VCSEL的發(fā)光面與半導(dǎo)體晶圓平行,具有面上發(fā)光的特性,發(fā)射光束窄且圓,所形成的激光器陣列易于與平面化的電路芯片鍵合,在精度層面由半導(dǎo)體加工設(shè)備保障,且易于和面上工藝的硅材料微型透鏡進行整合,提升光束質(zhì)量。近年來國內(nèi)外多家VCSEL激光器公司紛紛開發(fā)了多層結(jié)VCSEL激光器,將其發(fā)光功率密度提升了5-10 倍,這為應(yīng)用VCSEL開發(fā)長距激光雷達提供了可能。 ? 三種主流激光發(fā)射器性能比較
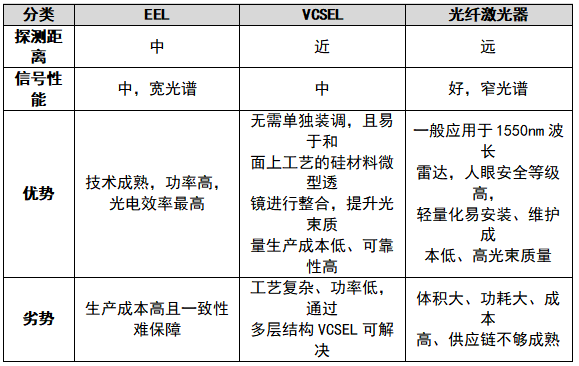
資料來源:禾賽科技招股說明書
行業(yè)內(nèi)主要的激光發(fā)射器制造企業(yè)包括國外的OSRAM(歐司朗)、AMS(艾邁斯半導(dǎo)體)、Lumentum(魯門特姆)等;國內(nèi)的深圳瑞波光電子有限公司、常州縱慧芯光半導(dǎo)體科技有限公司等。
國外供應(yīng)商在激光發(fā)射器和探測器行業(yè)耕耘較久,產(chǎn)品的成熟度和可靠性上有更多的實踐經(jīng)驗和優(yōu)勢,客戶群體也更為廣泛。國內(nèi)供應(yīng)商近些年發(fā)展迅速,產(chǎn)品性能已經(jīng)基本接近國外供應(yīng)鏈水平,并已經(jīng)有通過車規(guī)認證(AEC-Q102)的國產(chǎn)激光發(fā)射器和探測器出現(xiàn),元器件的車規(guī)化是車規(guī)級激光雷達實現(xiàn)的基礎(chǔ),國內(nèi)供應(yīng)商能夠滿足這一需求。相比國外供應(yīng)商,國內(nèi)供應(yīng)商在產(chǎn)品的定制化上有較大的靈活性,價格也有一定優(yōu)勢。
國內(nèi)外主流激光器廠商及路線布局
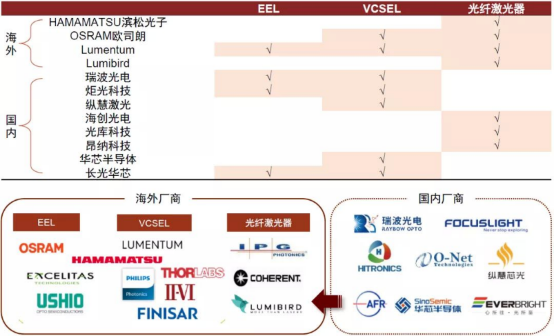
資料來源:Yole ? ②光電探測器
PD(光電二極管)成本低,是激光雷達探測器的常用選擇,缺點是靈敏度低,僅適合短距離探測,對于遠距離探測需要使用高增益的APD (雪崩二極管)。APD又分為線性工作模式和蓋格工作模式,蓋格工作模式增益最高,只輸出1或0的電平信號,靈敏度很高,稱為SPAD(單光子雪崩二極管)。SPAD可以單點獨立運行,也可以組成陣列(為表區(qū)分,本報告以SPPC代指SPAD陣列),SPPC中的各個SPAD獨立工作。SiPM(Silicon Photomultiplier,另稱MPPC)是另一種形式的SPAD陣列,由多個獨立的SPAD傳感器并聯(lián)組成,輸出的信號會有幅度級別的區(qū)分。安森美資料顯示,目前激光雷達市場上,PD和APD的使用率存在不同程度的下降,而SPAD、SPPC和SiPM的使用率在持續(xù)提升。盡管SPAD的靈敏度與轉(zhuǎn)換效率更高,但它受制于高成本和低量產(chǎn)一致性,因此目前APD仍為主流。
激光雷達探測器對比
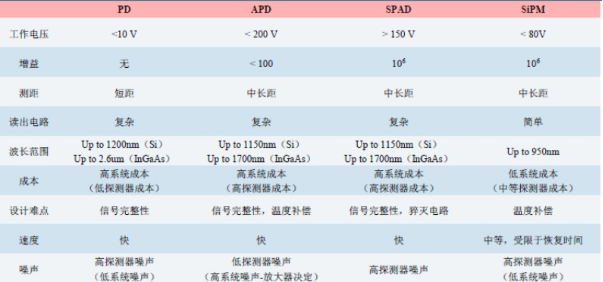
資料來源:濱松電子 ? SPPC陣列下每個單元的信號獨立輸出,輸出信號只有一個幅度,為減少噪聲影響,需要根據(jù)空間和時間相關(guān)度確認是否為信號,因而抗噪能力相對較差。SiPM陣列的每一個輸出端對應(yīng)多個并聯(lián)的單元,輸出電流是所有并聯(lián)單元的總和,因而輸出的信號有幅度區(qū)分,可以通過設(shè)定閾值直接提取信號,提取簡單速度快。若兩種陣列達到同樣的分辨率,SiPM陣列比SPPC陣列需要更多的SPAD單元,面積更大,所以相同面積下,SPPC陣列的分辨率顯然要高于SiPM陣列。
行業(yè)內(nèi)主要的光電探測器制造企業(yè)包括國外的First Sensor、Hamamatsu(濱松)、ON Semiconductor(安森美半導(dǎo)體)、索尼等;國內(nèi)創(chuàng)業(yè)企業(yè)如成都量芯集成科技有限公司、深圳阜時科技有限公司、深圳市靈明光子科技有限公司、南京芯視界微電子科技有限公司等。
③激光雷達芯片
I.FPGA芯片
FPGA芯片通常被用作激光雷達的主控芯片,國外主流的供應(yīng)商有賽靈思、英特爾等。國內(nèi)主要的供應(yīng)商有紫光國芯股份有限公司、西安智多晶微電子有限公司等。國外供應(yīng)商的產(chǎn)品性能相比國內(nèi)供應(yīng)商大幅領(lǐng)先,但國內(nèi)產(chǎn)品的邏輯資源規(guī)模和高速接口性能,也能夠滿足激光雷達的需求。
不過FPGA不是激光雷達主控芯片的唯一選擇,也可以選用高性能單片機(MCU)、數(shù)字信號處理單元(Digital Signal Processor,DSP)代替。MCU的國際主流供應(yīng)商有瑞薩電子、英飛凌等,DSP的主流供應(yīng)商有TI(德州儀器)、ADI(亞德諾半導(dǎo)體)等。
II.模擬芯片
模擬芯片用于搭建激光雷達系統(tǒng)中發(fā)光控制、光電信號轉(zhuǎn)換,以及電信號實時處理等關(guān)鍵子系統(tǒng)。國際范圍內(nèi)模擬芯片供應(yīng)商主要有TI(德州儀器),ADI(亞德諾半導(dǎo)體)等。國內(nèi)模擬芯片的供應(yīng)商主要包括矽力杰半導(dǎo)體技術(shù)有限公司、圣邦微電子(北京)股份有限公司等。國外供應(yīng)商在該領(lǐng)域積累已久,技術(shù)先進、產(chǎn)能充足、成熟度高,是行業(yè)的領(lǐng)導(dǎo)者。國內(nèi)供應(yīng)商相比國外起步較晚,從產(chǎn)品豐富程度到技術(shù)水平還普遍存在著一定差距,尤其車規(guī)類產(chǎn)品差距會更大。
半導(dǎo)體產(chǎn)業(yè)鏈
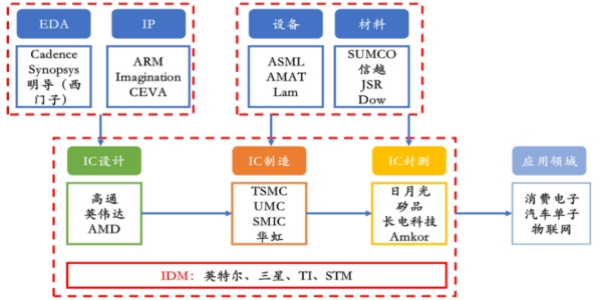
資料來源:中泰證券
④光學(xué)部件
光學(xué)部件方面,激光雷達公司一般為自主研發(fā)設(shè)計,然后選擇行業(yè)內(nèi)的加工公司完成生產(chǎn)和加工工序。光學(xué)部件國內(nèi)供應(yīng)鏈的技術(shù)水平已經(jīng)完全達到或超越國外供應(yīng)鏈的水準,且有明顯的成本優(yōu)勢,已經(jīng)可以完全替代國外供應(yīng)鏈和滿足產(chǎn)品加工的需求。
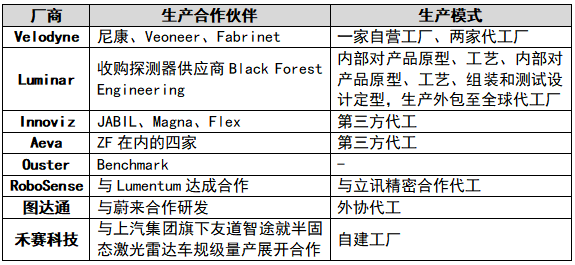
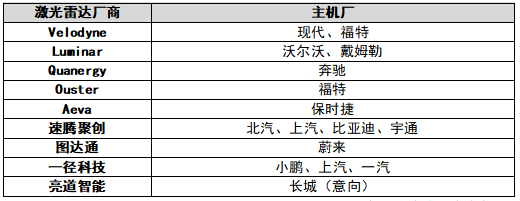
(2)中游硬件廠商 全球車載領(lǐng)域激光雷達玩家

資料來源:Yole
按掃描方式分類,全球主要激光雷達企業(yè)列表如下:
激光雷達不同技術(shù)路線代表企業(yè)
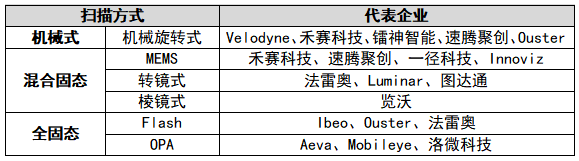
資料來源:公開資料整理
3. 芯片商業(yè)應(yīng)用進展
? (1)車載領(lǐng)域 主機廠基于安全第一、產(chǎn)品量產(chǎn)等理念,技術(shù)路線較為保守,大多通過ADAS功能的拓展和完善,漸進式地實現(xiàn)智能駕駛。ADAS主要指乘用車通過搭載激光雷達實現(xiàn)高級輔助駕駛功能,如自適應(yīng)巡航、自動跟車等。與智能駕駛的激光雷達相比,ADAS所應(yīng)用的激光雷達對車規(guī)化的批量生產(chǎn)能力、可靠性有更高的要求,對成本也更敏感。 ?
科技企業(yè)(Waymo、Momenta等)商業(yè)模式以售賣智能駕駛解決方案為主,且由于科技創(chuàng)新企業(yè)人才儲備完善、算法實力強,技術(shù)路線相對激進,直接著手于L4/L5的智能駕駛技術(shù)研發(fā)。而激光雷達是實現(xiàn)L4/L5級別智能駕駛技術(shù)的核心傳感器,國內(nèi)外眾多智能駕駛科技公司均采用激光雷達輸出的點云數(shù)據(jù)作為主要決策依據(jù)。360°機械旋轉(zhuǎn)式激光雷達作為主傳感器,一般被放在Robotaxi或Robotruck的車頂,且一臺車上通常會配置多臺激光雷達,或覆蓋車身兩側(cè)或長距短距兼顧,用以滿足復(fù)雜道路場景的探測需求。以嬴徹科技為例,其與東風商用車聯(lián)合開發(fā)的L3級Robotruck單車搭載3顆激光雷達,其中主雷達使用一顆RoboSense的MEMS激光雷達,兩顆角雷達則使用一徑科技的MEMS產(chǎn)品。
①主機廠量產(chǎn)車型
目前主機廠與激光雷達廠商均著力于推動激光雷達上車量產(chǎn),2021年以來激光雷達前裝量產(chǎn)加速,上海車展、廣州車展期間就有多款車型宣布搭載激光雷達,激光雷達的關(guān)鍵性和必要性得到進一步確認。激光雷達量產(chǎn)車型小鵬P5、北汽極狐阿爾法S、魏派WEY摩卡接連推出,國內(nèi)OEM廠商激光雷達率先上車。2021年4月14日,搭載大疆Livox激光雷達的車型小鵬P5發(fā)布;2021年4月18日,搭載華為激光雷達的北汽極狐阿爾法S發(fā)布。大部分預(yù)計搭載激光雷達的車企預(yù)計將在2021-2022年量產(chǎn)。
全球范圍內(nèi)L3級輔助駕駛量產(chǎn)車項目當前也處于快速開發(fā)之中:寶馬預(yù)計在2022年推出具有L3級智能駕駛功能的BMW Vision iNEXT;戴姆勒首款L3級智能駕駛系統(tǒng)于2021年在新款S級車型上推出;沃爾沃預(yù)計在2022年推出配備激光雷達的自動駕駛量產(chǎn)車型,實現(xiàn)沒有人工干預(yù)情況下的高速行駛;本田計劃于2022年在其Legend車型上提供L3級自動駕駛系統(tǒng)。
產(chǎn)品實現(xiàn)前裝量產(chǎn)需要經(jīng)歷產(chǎn)品迭代和生產(chǎn)驗證流程,整個流程所需的時間在18-36個月。根據(jù)速騰聚創(chuàng)資料,產(chǎn)品需經(jīng)歷Demo、A樣、B1樣、B2樣的多次迭代和最后SOP定型,在產(chǎn)品迭代的過程中,激光雷達廠家需要針對車規(guī)標準和OEM廠商的具體需求改良產(chǎn)品設(shè)計。
激光雷達認證流程
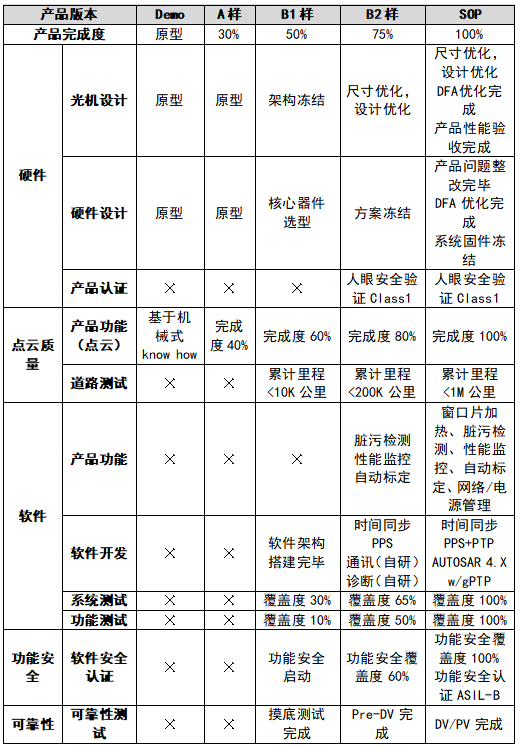
資料來源:速騰聚創(chuàng)
激光雷達實現(xiàn)前裝還需要通過車規(guī)級標準,主要為ISO26262《道路車輛功能安全》國際標準。車規(guī)要求產(chǎn)品可以通過DV(設(shè)計驗證)、PV(生產(chǎn)確認)以及EMC(電磁兼容性)等標準認證,并進行車規(guī)振動、沖擊、溫度循環(huán)等測試試驗。目前已經(jīng)通過全套車規(guī)標準并前裝量產(chǎn)的僅有Valeo,RoboSense、Innoviz據(jù)稱也已有產(chǎn)品通過車規(guī)測試。
激光雷達相關(guān)車規(guī)級標準
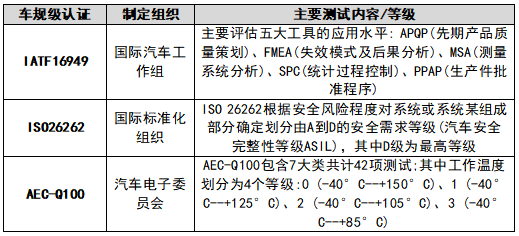
資料來源:民生證券
目前車規(guī)級激光雷達產(chǎn)品整體方案設(shè)計的發(fā)展總體方向為低成本、高性能、高集成度、固態(tài)化。各廠商根據(jù)自身技術(shù)儲備選擇了不同的技術(shù)方案以求達到OEM廠商的需求。激光雷達廠商通過對激光雷達發(fā)射系統(tǒng),接收系統(tǒng),信息處理系統(tǒng)和掃描系統(tǒng)的設(shè)計組合形成特色方案。
2018年,搭載著Scala激光雷達的新款奧迪A8發(fā)布,是全球首款支持L3智能駕駛的量產(chǎn)車型,從此開啟了激光雷達前裝量產(chǎn)的帷幕。不過該嘗試更多為試驗性質(zhì),L3功能也并未完全釋放,主要原因是其搭載的Scala4線激光雷達性能不佳。垂直探測視角為3.2°,垂直方向角分辨率1°,水平探測視角145°,水平方向角分辨率1°,其探測距離只有80米,點云出點數(shù)每秒6萬點。Velodyne全球汽車總監(jiān)John Eggert先生將其探測效果比作“一個拿著棍子揮舞的盲人”。自2020年下半年起,激光雷達上車的號角正式吹響,2020年11月本田宣布旗下最新一代豪華轎車Legend將會搭載5顆激光雷達,緊接著長城、小鵬、蔚來在隨后的兩個月內(nèi)先后宣布激光雷達搭載方案。據(jù)不完全統(tǒng)計,已有多家主機廠超過25款車型宣布搭載激光雷達,2022年將成為激光雷達批量上車的元年,相信隨后的幾年內(nèi)會有更多的激光雷達量產(chǎn)車型發(fā)布。??
由下表可見,國內(nèi)外主機廠、造車新勢力們在2022年均有激光雷達上車計劃,既有新出車型也有原有車型改款,單車搭載數(shù)量在1-5顆之間,其中以1顆(主雷達)和3顆(1主雷達+2角雷達)為主流方案。硬件合作方有11家之多,由此可見頭部雷達廠商并無明顯競爭力,市場仍處于相對初期的開放競爭市場份額階段。
搭載激光雷達車型統(tǒng)計
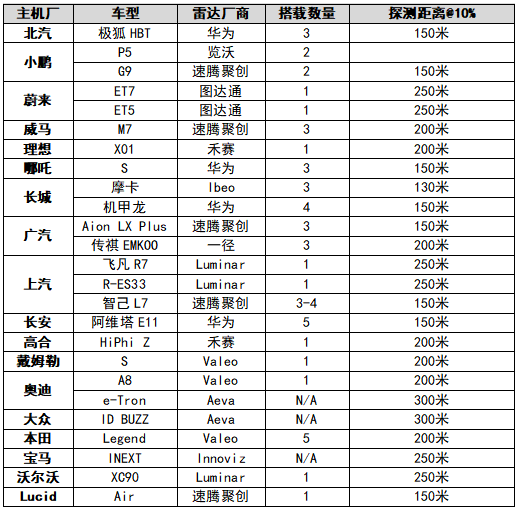
資料來源:億歐汽車、各主機廠官網(wǎng)
除激光雷達上車計劃外,國內(nèi)外主機廠近年來也紛紛布局入股激光雷達廠商,據(jù)不完全統(tǒng)計,主機廠投資事件整理如下:
主機廠投資激光雷達案例
來源:德載厚資本整理
②跨越式陣營
跨越式陣營以自動駕駛創(chuàng)業(yè)科技公司為主,由于發(fā)展初期覆蓋場景不同,區(qū)別于傳統(tǒng)主機廠和新勢力由ADAS逐漸過渡至完全自動駕駛的漸進式發(fā)展路線。該陣營普遍采用“一步到位”策略,直接開發(fā)激光雷達作為核心傳感器的L4智能駕駛技術(shù)。應(yīng)用場景則相對保守,以廠區(qū)、港口、礦區(qū)、機場、高速干線等封閉或半封閉場景為主。
不同于乘用車主機廠選用激光雷達對是否通過車規(guī)級認證有嚴格要求,自動駕駛方案商更注重產(chǎn)品性能以及性價比。此外,考慮到響應(yīng)速度以及客戶定制化開發(fā)需求,國內(nèi)自動駕駛公司更加偏好使用本土激光雷達硬件供應(yīng)商的產(chǎn)品。
主流自動駕駛公司的激光雷達供應(yīng)商(部分)
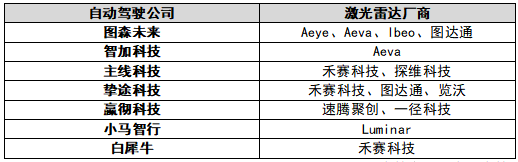
資料來源:公開資料
(2)智慧交通
除了智能駕駛領(lǐng)域,激光雷達的應(yīng)用領(lǐng)域也在不斷拓展,包括以汽車主機廠、Tier 1為代表的前裝高級輔助駕駛,以智能服務(wù)機器人為代表的避障導(dǎo)航系統(tǒng),還有隨著5G技術(shù)逐漸普及而產(chǎn)生的智能交通車路協(xié)同應(yīng)用,都為激光雷達帶來了更廣闊的市場。
路端激光雷達有兩個主要作用,一是實現(xiàn)高精地圖的采集,二是對路面交通進行實時監(jiān)控。路端交通領(lǐng)域主要由政府相關(guān)部門主導(dǎo),對車規(guī)級的集成要求較低,但對算法要求很高,激光雷達作為路端感知器,需要對道路使用者進行監(jiān)測感知,目前以機械旋轉(zhuǎn)式激光雷達為主要應(yīng)用產(chǎn)品。應(yīng)用場景主要是高速公路和十字路口。
①智慧高速市場
我國目前存量高速公路里程達16.1萬公里,假設(shè)每年新建成高速公路里程0.75萬公里不變,按照單臺激光雷達設(shè)備覆蓋200米計算,高速場景每公里需要4個激光雷達,預(yù)計在2025年滲透率能達到10%,未來5年市場規(guī)模合計約37億元。
智慧高速市場規(guī)模預(yù)計
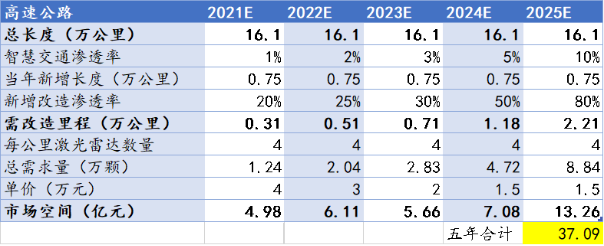
資料來源:公開資料、參編單位提供
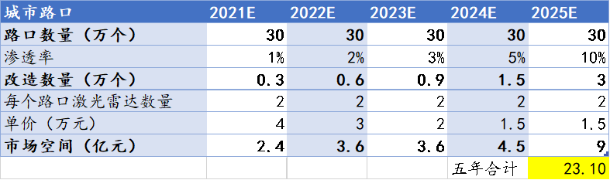
②城市路口
我國目前城市路口約30萬個,假設(shè)按對角交叉布置,每個路口需布置2個激光雷達,在2025年市場滲透率達到10%的情況下,未來5年市場空間合計約23億元。 ? 十字路口激光雷達市場規(guī)模預(yù)計
編輯:黃飛













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論